Основы мехатроники
 Скачать 0.78 Mb. Скачать 0.78 Mb.
|

|
ГЛАВА 2. Концепция построения мехатронных систем 2.1. Определения и терминология мехатроники Современный термин "Мехатроника" ("Меспа(гошс8") , согласно японским источникам [52], был введен фирмой Уазкаша Е1ес1пс в 1969 году и зарегистрирован как торговая марка в 1972 году. Это название получено комбинацией слов "МЕХАника" и "элекТРОНИКА". Любопытно заметить, что в отечественной литературе еще в начале 50-х годов использовался подобным же образом образованный термин -"механотроны" [8]. Так назывались электронные лампы с подвижными электродами, которые применялись в качестве датчиков малых перемещений, ускорений ,вибраций и т.п.. Начиная с 80-х годов термин "Мехатроника" все чаще применяется в мировой технической литературе как название целого класса машин с компьютерным управлением движением. Мехатроника находится только в стадии становления, поэтому на сегодняшний день ее определение и базовая терминология еще полностью не сформирована. Поэтому в настоящем пособии представляется целесообразным рассмотреть определения, выражающих суть предмета мехатроники как в широком, так и в узком (специальном) смысле. Общее определение мехатроники в широком понимании дано в 1995 году в Государственном образовательном стандарте РФ специальности 07.18 "Мехатроника": Мехатроника - это новая область науки и техники, посвященная созданию и эксплуатации машин и систем с компьютерным управлением движением, которая базируется на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов. В данном определении особо подчеркнута триединая сущность мехатронных систем (МС), в основу построения которых заложена идея глубокой взаимосвязи механических, электронных и компьютерных элементов. Наверное поэтому наиболее распространенным графическим символом мехатроники стали три пересекающихся круга (рис.2.1), помещенные во внешнюю оболочку "Производство" - "Менеджмент" -"Требования рынка" [58]. 92 13 Пульт изготовлен с учетом эргономических требований и выполняет функции интерфейса "человек - машина" в режимах обучения и управления движением. Пульт имеет 8-дюймовый дисплей (разрешение УСА 640x480), пленочную клавиатуру, мышь 6В для управления по шести координатам, кнопки аварийного отключения, включения/выключения приводов, переключатель режимов работы и выключатели разрешения. С помощью стандартного штекера к пульту можно дополнительно подключить клавиатуру персонального компьютера. Микроконтроллер отправляет клавиатурные данные по стандартной шине в персональный компьютер, дисплейная информация передается через высокоскоростной последовательный интерфейс. Метод "самообучения" предполагает предварительное прохождение инструментом детали-эталона, когда координаты точек траектории автоматически вводятся в память компьютера. Запись точки производится при касании инструмента, который выполняет роль щупа базовой поверхности детали. По сути робот работает в этом варианте как координатно-измерительная машина. Компьютер обрабатывает массив полученных точек и формирует необходимое и достаточное количество опорных точек траектории. Координаты опорных точек передаются по специальному интерфейсу из компьютера в систему управления робота. При автоматизированном программировании пространственных траекторий одним из часто используемых графических форматов является формат, в котором содержится описание последовательности и декартовых координат опорных точек, но при этом нет описания графических примитивов (линия, окружность, сплайн). Основным недостатком данного подхода является использование линейной интерполяции для выполнения движения между точками, что неприемлемо для мехатронных систем при высоких требованиях к точности движения. Для систем этого класса следует использовать формат, содержащий графические примитивы и осуществлять интеллектуальную сегментацию траектории, заданной простым текстовым форматом. Для проведения интеллектуальной сегментации траектории движения с целью интерполяции ее графическими примитивами используется нечеткий интерполяционный фильтр. Основным геометрическим примитивом для проводимой интерполяции является кубический сплайн, а частными его случаями является прямая линия и окружность. Нечеткий интерполяционный фильтр осуществляет чтение простого текстового формата с последующей параметризацией траектории по индексу 1° - порядковым номером / = 1,2,..., т, где т - общее число точек траектории. После параметризации фильтр осуществляет итерационный анализ трех точек траектории и определяет кривизну К траектории для средней точки, затем принимает решение о рациональном виде обеспечить высокое качество управления мехатронной системой можно только с учетом специфики конкретного управляемого объекта. Поэтому учебные курсы по мехатронике целесообразно включать в программы подготовки по специальностям, предметом которых являются конкретные классы производственных машин и процессов (например, "Автоматизация технологических процессов и производств", "Металлорежущие станки", "Машины для обработки металлов давлением", "Роботы и робототехнические системы"). 2. В определении подчеркивается синергетический характер интеграции составляющих элементов в мехатронных объектах. Синергия (греч.) - это совместное действие, направленное на достижение общей цели. При этом принципиально важно, что составляющие части не просто дополняют друг друга, но объединяются таким образом, что образованная система обладает качественно новыми свойствами. В мехатронике все энергетические и информационные потоки направлены на достижение единой цели - реализации заданного управляемого движения. В некоторых определениях вместо термина "синергетическое" используются понятия "органическое", "системное" и даже "интимное" (буквальный перевод англ. шшшйе) соединение частей в мехатронную систему. 3. Интегрированные мехатронные элементы выбираются разработчиком уже на стадии проектирования машины, а затем обеспечивается необходимая инженерная и технологическая поддержка при производстве и эксплуатации машины. В этом радикальное отличие мехатронных машин от традиционных, когда зачастую пользователь был вынужден самостоятельно объединять в систему разнородные механические, электронные и информационно-управляющие устройства различных изготовителей. Именно поэтому многие сложные комплексы (например, некоторые гибкие производственные системы в отечественном машиностроении) показали на практике низкую надежность и невысокую технико-экономическую эффективность.
90 15 Программная траектория (Ь) рабочего органа определяется геометрическими характеристиками обрабатываемой поверхности и задается как параметрическая функция: и Ярг=Я(Х) (ОйЛйАпп)(5.13), где Хм - вектор-столбец, определяющий программное положение и ориентацию рабочего органа в базовой системе координат (см. (5.1)); Я - путь, пройденный рабочим органом вдоль траектории (скалярный параметр, который в дифференциальной геометрии называется лонгальным). Важно подчеркнуть, что аргументом векторной функции в уравнении (5.13) является не время 1 , как в традиционных системах автоматического управления, а геометрическая переменная - путь. Желаемое значение контурной скорости определяется по выражением: Лрг=*(ррг-р)(514)> где Ррг -желаемое значение управляемой составляющей силы резания (тангенциальной или нормальной к траектории инструмента); Р -текущее значение, измеряемое датчиком силы; I* - оператор (в общем случае нелинейный), определяющий алгоритм управления контурной скоростью робота. В частном случае для ряда операций механообработки целесообразно стабилизировать мощность резания. Тогда выражение (5.14) приводится к виду: х»-"/я^(ЗД5)' где N - заданное значение мощности резания. Таким образом, особенность параметрического подхода состоит в независимом задании траектории рабочего органа в пространстве и в адаптивном управлении его контурной скоростью во времени. Раздельное формирование законов управления движением мехатронной системы в пространстве и во времени позволяет использовать различные критерии при их оптимизации, что соответствует постановке задач управления мехатронными системами, рассмотренной в п.5.1. При этом движение рабочего органа как конечного управляемого звена обеспечивается согласованными перемещениями всех исполнительных приводов и звеньев манипулятора. Предлагаемый параметрический подход позволяет также учесть влияние рабочего процесса на движение (робота при выполнении 2.2. Структура и принципы интеграции мехатронных систем Рассмотрим обобщенную структуру машин с компьютерным управлением, ориентированных на задачи автоматизированного машиностроения, которая представлена на рис.2.2. В основу построения данной схемы положена структура автоматических роботов, введенная академиком ЕЛЛоповым [33,34]. Внешней средой для машин рассматриваемого класса является технологическая среда, которая содержит различное основное и вспомогательное оборудование, технологическую оснастку и объекты работ. При выполнении мехатронной системой заданного функционального движения объекты работ оказывают возмущающие воздействия на рабочий орган. Примерами таких воздействий могут служить силы резания для операций механообработки, контактные силы и моменты сил при сборке, сила реакции струи жидкости при операции гидравлической резки. Внешние среды укрупненно можно разделить на два основных класса: детерминированные и недетерминированные. К детерминированным относятся среды, для которых параметры возмущающих воздействий и характеристики объектов работ могут быть заранее определены с необходимой для проектирования МС степенью адекватности. Некоторые среды являются недетерминированными по своей природе (например, экстремальные среды: подводные, подземные и т.п.). Характеристики технологических сред как правило могут быть определены с помощью аналитико-экспериментальных исследований и методов компьютерного моделирования. Например, для оценки сил резания при механообработке проводят серии экспериментов на специальных исследовательских установках, параметры вибрационных воздействий измеряют на вибростендах с последующим формированием математических и компьютерных моделей возмущающих воздействий на основе экспериментальных данных [31,44]. Однако для организации и проведения подобных исследований зачастую требуются слишком сложные и дорогостоявие^аппаратура и измерительные технологии. Так для предварительной оценки силовых воздействий на рабочий орган при операции роботизированного удаления облоя с литых изделий необходимо измерять фактические форму,, и размеры каждой заготовки. В таких случаях целесообразно применять методы адаптивного управления, которые позволяют автоматически корректировать закон движения МС непосредственно в ходе выполнения операции (подробнее см. гл.5). 88 17 5.5. Системы управления тактического уровня 5.5.1. Система контурного силового управления технологическим роботом Рассмотрим построение системы управления тактического уровня для технологического робота, выполняющего операции механообработки (описание данного РТК приведено в п.4.3) на основе параметрического подхода [31,32]. Технологическая постановка задачи предполагает одновременное управление перемещением рабочего органа по заданной траектории (кривая Ь) и развиваемой в процессе движения силой (вектор Р), которая воздействует на объект работ (рис.5.10). Таким образом, в системе должны сочетаться методы контурного и силового управления движением робота. 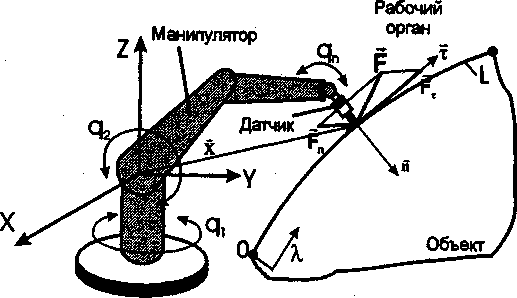 Рис. 5.10. Схема роботизированной механообработки. Робот при этом действует аналогично человеческой руке. Действительно, развивая определенные усилия в суставах руки, человек может перемещать в пространстве предметы, выполнять механическую работу. В то же время он с помощью нервно-мышечной системы воспринимает и обратные силовые воздействия со стороны объекта, что позволяет выполнять человеку многие сложные операции, (например, сборочные) даже вслепую. Приложение принципа двустороннего действия для технологических роботов требует учета их специфики как объекта автоматического управления, а также особенностей роботизированных технологических операций [9]. , IV. Организация обмена данными с периферийными устройствами, сенсорами и другими устройствами системы. Задачей мехатронной системы является преобразование информации о цели управления, поступающей с верхнего уровня, в целенаправленное функциональное движение системы с управлением на основе принципа обратной связи. Блок-схема, иллюстрирующая ход энергетических и информационных потоков в МС, приведена на рис.2.3. Характерно, что электрическая энергия используется в современных системах как промежуточная энергетическая форма. Таким образом, для физической реализации мехатронной системы теоретически необходимы четыре основных функциональных блока: последовательно соединенные информационно-электрический и электромеханический энергетические преобразователи в прямой цепи и электро-информационный и механико-информационный преобразователи в цепи обратной связи. Примечание. Если работа силовой части машины с энергетической точки зрения основана на гидравлических, пневматических или комбинированных (например, электрогидравлических) процессах, то очевидно необходимы соответствующие преобразователи и датчики в цепи обратной связи, которые в данном пособии не рассматриваются. Проанализируем физический характер преобразований и структуру традиционной машины с компьютерным управлением с данной точки зрения (рис.2.4). Устройство компьютерного управления на основании входной информации, поступающей с верхнего уровня управления и по цепям обратной связи от сенсоров, выдает во времени на исполнительные приводы управляющие электрические сигналы. В силовых преобразователях происходит усиление по мощности данных сигналов, их модуляция (наиболее широко применяются широтно-импульсные модуляторы). Затем исполнительные приводы прикладывают соответствующие усилия (силы и моменты) к звеньям механического устройства, что в результате вызывает целенаправленное движение конечного звена машины - ее рабочего органа. Для сопряжения элементов в систему традиционно вводят специальные интерфейсные устройства, которые на рис.2.4 обозначены И1-И7. Рассмотрим примеры межблоковых интерфейсов, которые наиболее часто встречаются в машинах с компьютерным управлением ( станках с ЧПУ, промышленных роботах и т.п.), широко применяемых в автоматизированном машиностроении. Интерфейс И1 представляет собой комплекс сетевых аппаратно-программных средств для сопряжения устройства компьютерного управления с компьютерной сетью, либо это интерфейс человек - машина, 86 19 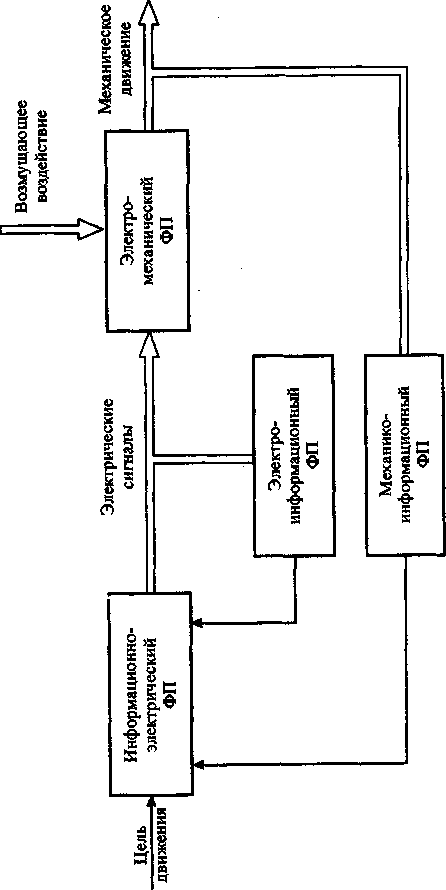 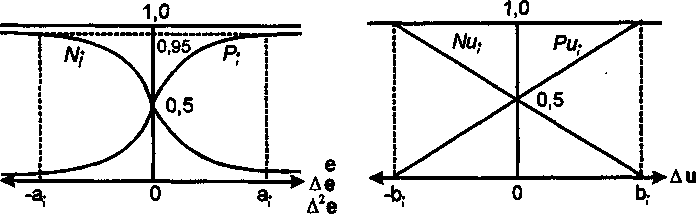 Аи(1фи(к)-и(к-\)=кп[е(к)-е(к-\)\+квТе(к)ь +кд-Тл[е(ку-2е(к-\)+е(к-2))=(5.14) =кпТе(к)ьк1}Ае(к) +кдГ1А2е(к) где Ае(к),Л е(к) - конечные разности соответственно 1-го и 2-го порядков дискретного сигнала ошибки. В уравнении (5.14) первое слагаемое соответствует интегральной компоненте ПИД- регулятора, второе слагаемое - пропорциональной компоненте и третье -дифференциальной составляющей регулятора. На основании выражения (5.14) составлены следующие ЛПУ для нечеткого контроллера: ЛПУ1: ЕСЛИ в, ЕСТЬ Р„ ТО Ди, ЕСТЬ Ро1 ЛПУ2: ЕСЛИ е, ЕСТЬ Ы,, ТО Ди, ЕСТЬ Щ, ,. 1 ,. ЛПУЗ: ЕСЛИ Де, ЕСТЬ Р„ ТО Ди, ЕСТЬ Р„ ЛПУ4: ЕСЛИ Де, ЕСТЬ Ы„ ТО Ди, ЕСТЬ Ыи1 ЛПУ5: ЕСЛИ Д!е, ЕСТЬ Р„ ТО Ди, ЕСТЬ Р„з ЛПУ6: ЕСЛИ Д'е, ЕСТЬ 1\1„ ТО Ли, ЕСТЬ N.. Рис. 5.9. Функции принадлежности сигналов системы. Здесь величины Р1, Рш и №, №д (1=1, 2, 3)- соответственно положительные и отрицательные переменные для сигналов рассогласования и управления, функции принадлежности которых представлены на рис.5.9. Функции принадлежности для сигнала ошибки имеют вид кривой с насыщением (типа арктангенса), для управляющего сигнала - обычную линейную форму. |