Основы мехатроники
 Скачать 0.78 Mb. Скачать 0.78 Mb.
|

|
« 20 85 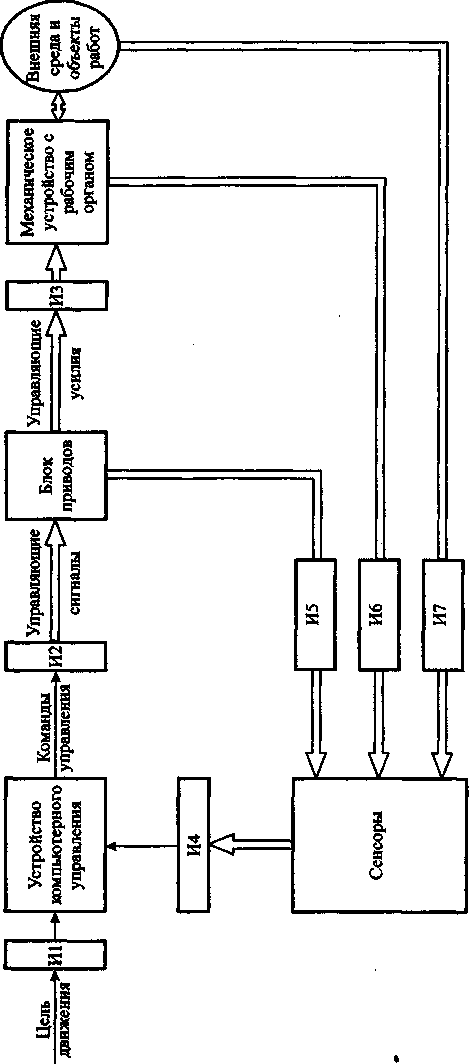 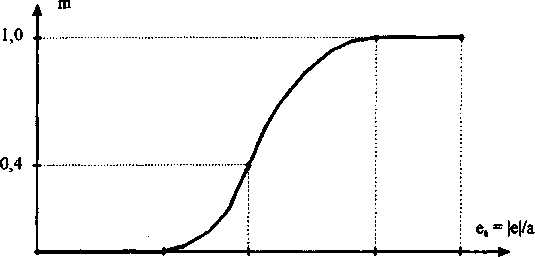 0,3 0,5 0,8 1,0 (а) - непрерывная числовая функция принадлежности |е| - модуль сигнала рассогласования а - максимальная величина ошибки 1,0 0,9 ± 0,8} 0,7 | 0,6 0,5 0,4 + 0,3 { 0,2 т 0,1 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0 (б) - дискретная числовая функция принадлежности ИСТИНА ПОЧТИ ИСТИНА НЕ ЗНАЮ е„=|е|/а ► ПОЧТИ ЛОЖЬ ЛОЖЬ 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0 (в) - дискретная лингвистическая функция принадлежности Рис. 5.8 Графическое представление функций принадлежности   Исключаемый интерфейс И2 преобразования, выполняемого данным модулем. В идеальном для пользователя варианте мехатронный модуль, получив на вход информацию о цели управления, должен исполнить с заданными показателями качества программное функциональное движение. Сущность мехатронного подхода состоит в том, что он направлен на интеграцию конкретного класса элементов (механических, электронных, компьютерных, электротехнических, интерфейсных и др.), которые имеют принципиально различную физическую природу и предназначены для реализации сложного функционального движения. Аппаратное объединение элементов в единые конструктивные модули должно обязательно сопровождаться разработкой интегрированного программного обеспечения. Программные средства МС должны обеспечивать непосредственный переход от замысла системы через ее математическое моделирование к управлению функциональным движением в реальном времени. Таким образом, проектирование МС предполагает разработку комплекса аппаратно-программных средств, ориентированных на конкретные прикладные задачи (подробнее этот вопрос рассмотрен в гл. 4,5). Для реализации сформулированного мехатронного подхода следует определить локальные точки интеграции элементов в единый функциональный модуль. Для этого вернемся к рассмотрению блок-схемы на рис.2.4. Потенциально возможные точки аппаратной интеграции и структуры соответствующих мехатронных модулей представлены в табл. 1. Таблица! Исходные элементы Базовый элемент Дополняющий элемент Микропроцессор Мехатронный Модуль Силовой преобразователь Интеллектуальны й силовой преобразователь ИЗ Механическое устройство Микропроцессор Исполнительный двигатель Сенсор Приводной модуль И4 Интеллектуальны й сенсор ИЗ.И5 Сенсор Приводной модуль Рабочий орган Мехатронный модуль движения И6 Сенсор Очувствленный рабочий орган Целесообразность применения методов нечеткой логики при управлении мехатронными системами обусловлена отмеченными в п.5.1 особенностями постановки задач управления, которые заключаются в априорной неопределенности возмущающих воздействий, переменности параметров мехатронных объектов управления и в сложности построения аналитических моделей систем. Характерно, что теория нечетких множеств была предложена проф. Л.Заде именно для решения проблем управления сложными техническими системами. Структурная схема нечеткого регулятора с параметрической адаптацией приведена на рис.5.7. Нечеткий контроллер функционирует на основе экспертной базы знаний и выполняет следующие основные операции:
Рис. 5.7. Блок-схема нечеткого регулятора. Для математического представления нечеткой информации используются нечеткие множества, состав объектов которых зависит от мнения экспертов, цели и времени формирования множества. Состав множества задается с помощью функций принадлежности, имеющих вероятностный характер. Так, выражение тА (Х)= С означает, что элемент А принадлежит множеству X с вероятностью С. 24 81      Глава 3. Мехатронные модули движения Глава 3. Мехатронные модули движенияРассмотрим основные виды однокоординатных модулей движения, разработанных для решения задач автоматизированного 'машиностроения. Мехатронные модули движения (ММД) являются функциональными "кубиками", из которых затем можно компоновать сложные мехатронные системы, примеры которых рассматриваются в гл.4. Общая схема, поясняющая эволюцию развития мехатронных модулей движения от моторов-редукторов до перспективных интеллектуальных модулей, приведена на рис.3.1. Предлагаемая схема, несмотря на ее очевидную условность, разработана с целью систематизации известных ММД по составу и степени интеграции элементов. 3.1. Моторы-редукторы Моторы- редукторы являются, по-видимому, исторически первыми по принципу своего построения мехатронными модулями, которые стали серийно выпускаться и нашли очень широкое применение в приводах различных машин и механизмов. Мотор-редуктор представляет собой компактный конструктивный модуль, объединяющий электродвигатель и редуктор. По сравнению с традиционным соединением двигателя и редуктора через муфту моторы- редукторы обладают целым рядом существенных преимуществ:
Конструктивное исполнение модуля определяется типами используемых редуктора и электродвигателя. В зависимости от технических требований задачи применяются цилиндрические, насадные, конические, червячные и другие виды редукторов. В качестве электродвигателей наиболее часто используются асинхронные двигатели с короткозамкнутым ротором и регулируемыми преобразователями частоты вращения, однофазные двигатели и двигатели постоянного тока. Общий вид одноступенчатого червячного мотора-редуктора (изготовитель АО "Завод Редуктор", С-Петербург) показан на рис.3.2,а. Редуктор выпускается для общемашиностроительного применения. Особенность конструкции состоит в том, что в ступице червячного колеса 26             встроена предохранительная муфта, позволяющая ограничивать развиваемый крутящий момент. встроена предохранительная муфта, позволяющая ограничивать развиваемый крутящий момент.Основные технические характеристики данного мотора-редуктора (типоразмер МРЧс-82): мощность электродвигателя - 0.27 кВт, номинальная скорость вращения выходного вала - 0.28 с"1, максимальный момент на выходном валу - 50 Нм, передаточное число редуктора - 86, габаритные размеры модуля - 500 х 255 х 245 мм, масса модуля - 35 кг. На рис.3.2,6 показан насадной мотор-редуктор фирмы "Бауэр", который насаживается непосредственно на вал ведомого механического устройства и поэтому является быстросъемным модулем. Блочно-модульный принцип конструирования позволяет комбинировать в модуле двигатели и редукторы различных типов и мощностей, обеспечивая таким образом широкий спектр механических характеристик модуля: по частоте вращения от 0.2 до 160 об/мин, по мощности от 0.015 до 75 кВт. 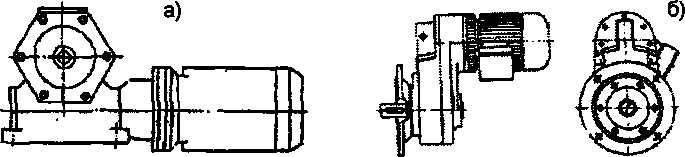 Рис. 3.2. а) общий вид червячного мотора-редуктора; б) общий вид насадного мотора-редуктора. Стоимостной анализ, проведенный фирмой "Бауэр" [28], показал, что применение моторов-редукторов рентабельно в машинах с низкой скоростью перемещения рабочего органа (особенно при частотах вращения ниже 500 1/мин ). Таким образом, потребитель приобретает и эксплуатирует мотор-редуктор как единый модуль, догадываясь о наличии в его составе зубчатых передач только из названия и при смене масла. 28  По сравнению с синхронными двигателями вентильные ВМД позволяют регулировать скорость вращения с помощью обратной связи, частота вращения не зависит от напряжения питания, нет проблемы выпадения из синхронизма. По сравнению с синхронными двигателями вентильные ВМД позволяют регулировать скорость вращения с помощью обратной связи, частота вращения не зависит от напряжения питания, нет проблемы выпадения из синхронизма.Основной недостаток вентильных двигателей - наличие дорогостоящих магнитов и блока управления коммутацией обмоток, отсюда пониженный показатель мощность/цена и повышенные габариты. В современных модификациях эта проблема решается путем построения этих блоков на базе относительно дешевых интегральных микросхем. В табл.2 приведены технические характеристики отечественных бесконтактных двигателей серии ДБМ (разработчики и изготовители ЗАО "Машиноаппарат" и ТОО "МЭЛМА", г. Москва) [2]. Таблица 2
В состав современных мехатронных модулей движения на основе ВМД обязательно входят также датчики обратной связи и иногда управляемые тормоза, что позволяет отнести такие ММД ко второму поколению (см.рис.3.1). В качестве датчиков наиболее часто применяются фотоимпульсные датчики (инкодеры), тахогенераторы, резольверы и кодовые датчики положения. Принципиально важно, что модуль "двигатель-датчик" имеет единый вал, что позволяет сочетать высокие технические параметры и низкую стоимость. Конструктивная схема модуля "двигатель постоянного тока - встроенный тахогенератор", иллюстрирующая эту идею, приведена на рис.3.3. устройство компьютерного управления должно выполнять в реальном времени следующие основные функции:
- умножение обратной матрицы Якоби на вектор-столбец программной скорости рабочего органа; - выдача программы управления на исполнительный уровень. Назначением исполнительного уровня управления является расчет и выдача управляющих сигналов на блок приводов мехатронной системы в соответствии с программой управления с учетом технических характеристик силовых преобразователей. Типичные алгоритмы регулирования исполнительного уровня приведены в п.5.4. Для иерархических систем управления в мехатронике действует принцип, сформулированный проф. Саридисом (8апшз О.К) , согласно которому по мере продвижения от высших к низшим уровням управления понижается интеллектуальность системы, но повышается ее точность (данный принцип в англоязычной литературе имеет аббревиатуру ГРШ -1псгеа$ш§ Ргесшоп мйш Оесгеазтд 1п1еШ§епсе). При этом под "интеллектуальностью" понимается способность системы приобретать специальные знания, позволяющие уточнить поставленную задачу и определить пути ее решения, а под "неточностью" - неопределенность в операциях по решению данной задачи. Рассмотрим несколько примеров мехатронных модулей и систем с интеллектуальным управлением, обладающих некоторыми из перечисленных признаков. 5.4. Системы управления исполнительного уровня Контроллеры движения, архитектура и технические характеристики которых рассмотрены в п.3.5.1, являются устройствами управления исполнительного уровня согласно принятой иерархии управления движением мехатронных систем (рис.5.4). Назначение устройства управления состоит в обеспечении заданных требований по устойчивости, точности и качеству переходных процессов в системе при достижении цели управления движением, которая поступает с тактического уровня управления. При этом необходимо учитывать специфику мехатронных объектов управления, отмеченную в п.5.1. Структурная схема системы управления движением, реализуемая типовым контроллером, представлена на рис.5.5. В состав системы входят | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||