Основы мехатроники
 Скачать 0.78 Mb. Скачать 0.78 Mb.
|

4 101 ГЛАВА 1. Предпосылки развития мехатроники и области применения мехатронных систем В широком смысле мехатровика изучает технические системы, агрегаты, машины и комплексы машин различного назначения с компьютерным управлением движением. Главная методологическая идея мехатроники состоит в системном сочетании таких ранее обособленных научно-технических областей как точная механика, микроэлектроника, электротехника, компьютерное управление и информационные технологии. В мехатронных системах укрупненно принято выделять три составные части - механическую, электронную и компьютерную, объединение которых и образует систему в целом (рис. 1,1). Суть мехатронного подхода заключается в тесной взаимосвязи указанных компонент на всех этапах жизненного цикла изделия, начиная со стадии его проектирования и маркетинга и заканчивая производством и эксплуатацией заказчиком. 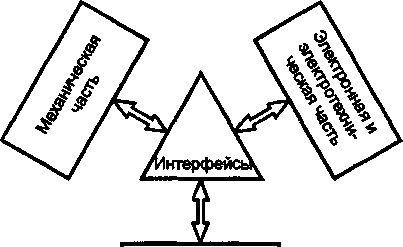 Компьютерная часть Рис. 1.1. Компоненты мехатронных систем. К основным преимуществам мехатронных устройств по сравнению с традиционными средствами автоматизации следует отнести:
управления. М.: Наука, 1978. з 1. Подураев Ю.В. Технологические роботы с контурным силовым управлением для операций механообработки.// Вестник машиностроения, №8,1993.
б 99 Стремительное развитие мехатроники в 90-х годах как нового научно-технического направления обусловлено тремя основными факторами:
Современный этап развития автоматизированного машиностроения в нашей стране происходит в новых экономических реалиях, когда стоит вопрос о технологической состоятельности страны и конкурентоспособности выпускаемой продукции. Можно выделить следующие тенденции изменения и ключевые требования мирового рынка в рассматриваемой области:
- бурное развитие компьютерных систем и технологий, средств телекоммуникации (в странах ЕЭС к 2000 году до 60% роста Совокупного Национального Продукта ожидается именно за счет этих отраслей); прямым следствием этой общей тенденции является интеллектуализация систем управления механическим движением и технологическими функциями современных машин. Анализ указанных тенденций показывает, что достигнуть качественно нового уровня основного технологического оборудования на основе традиционных подходов уже практически нереально. По данным прогноза [22], подготовленного по заданию Министерства науки и технологий РФ в 1998 году по материалам европейских выставок и конференций, в ближайшие годы ожидается резкий рост отношения "Качество/Цена" для нетрадиционных производственных машин (НПМ), выполненных на основе новых механизмов параллельных соединений и гексаподов. Так, к 2005 году этот показатель для НПМ (на примере обрабатывающих центров) в 1.5-2 раза будет выше по сравнению с традиционным станочным оборудованием. Заключение Мехатроника как новая область науки и техники находится только в начальной стадии своего развития. Но уже сегодня практически по каждой из обсуждавшихся тем существует много публикаций, которые не могли быть включены в книгу из-за ограниченности ее объема. Никакой объем просто прочитанного материала не превратит читателя в специалиста -необходима активная самостоятельная работа по интересующей тематике. Дальнейшее развитие мехатроники будет происходить через образовательные программы подготовки и переподготовки специалистов, создание ее научных фундаментальных основ и развитие прикладных исследований, разработку и внедрение мехатронных модулей и систем в промышленности. Для практического воплощения этих задач необходима тесная совместная работа ученых, инженеров-практиков и менеджеров многих областей науки и техники из различных стран. Именно в интеграции их усилий - залог успешного развития мехатроники как одного из перспективных направлений наступающего века. 8 97 процессов, протекающих в мехатронной системе, в первую очередь -процесса управления функциональными движениями машин и агрегатов. Одновременно идет разработка новых принципов и технологий изготовления высокоточных и компактных механических узлов, а также новых типов электродвигателей (в первую очередь высокомоментных, бесколлекторных н линейных), датчиков обратной связи и информации. Синтез новых прецизионных, информационных и измерительных наукоемких технологий дает основу для проектирования и производства интеллектуальных мехатронных модулей и систем. В дальнейшем мехатронные машины и системы будут объединяться в мехатронные комплексы на базе единых интеграционных платформ. Цель создания таких комплексов - добиться сочетания высокой производительности и одновременно гибкости технико-технологической среды за счет возможности ее реконфигурации, что позволит обеспечить конкурентоспособность и высокое качество выпускаемой продукции на рынках XXI века. Важно подчеркнуть, что толчком для становления мехатроники стали не общие теоретические идеи ( как это было, например, в истории робототехники), а технические достижения инженеров-практиков в различных отраслях. Затем заинтересованные организации в конце 80-х годов стали объединяться в научно-технические сообщества. В России координацию научно-технических работ в настоящее время осуществляет Ассоциация инновационного машиностроения и мехатроники. Аналогичные организации были созданы и во многих странах Европы, где особенно следует выделить деятельность ЦК Меспайошсв Рогат (Великобритания), который возглавляет проф. Ф.Р.Мор (Рго^Р.К.Мооге) из Де Монтфортского университета (гЛейстер). В эти же годы курсы по мехатронике стали включать в учебные планы технические университеты. В нашей стране специальность 07.18 "Мехатроника" была введена в классификатор Государственного комитета по высшему образованию в марте 1994 года. Первыми эту специальность открыли МГТУ «СТАНКИН», МГТУ им.Н.Э.Баумана и Балтийский ГТУ (С Петербург).Сейчас по специальности "Мехатроника" готовят уже в 16 вузах различных регионов России. Координацию их работы осуществляет Научно-методический совет, сопредседателями которого являются проф.Кулешов В.С. (МГТУ «СТАНКИН») и проф.Лакота Н.А. (МГТУ им.Н.Э.Баумана). Активно ведется подготовка бакалавров, магистров и аспирантов по мехатронике в технических университетах многих стран Европы и мира. Например, в Великобритании в 1997 году 26 университетов включили курсы по мехатронике в свои учебные программы. Со второй половины 90-х годов начинается активная разработка фундаментальных основ мехатроники как науки. В марте 1996 года Выходом НС является вектор управляющих сигналов, выдаваемых устройством управления на исполнительные приводы. Как вариант, в случае применения в системе стандартных ПИД-регуляторов, на выходе НС получаем значения соответствующих коэффициентов. На тактическом уровне управления НС часто используются как средство решения обратных кинематических задач для многозвенных механизмов, когда найти решение геометрическим и даже численным путями в ряде случаев не удается. Особенно этот подход эффективен для механизмов с избыточными степенями подвижности (п>6). Для решения обратной задачи о положении п-звенного манипулятора согласно уравнению (5.3) на входе НС задается 6-мерный вектор вида (5.1). Тогда на выходе получаем п-мерный вектор обобщенных координат (рис.5.16). Предварительное обучение такой сети сводится по сути к многократному решению прямой задачи о положении механизма. Эта задача может решаться либо на компьютерной модели, либо экспериментально на натурном образце робота. Разработка компьютерной программы вычислений по формулам вида (5.2), даже для избыточных манипуляторов, не содержит методических проблем. Однако при этом не будут учтены многие погрешности, присущие реальным конструкциям. Экспериментальный способ решения прямой задачи предусматривает вывод робота в заранее определенные конфигурации в режиме дистанционного управления или по программе. При этом манипулятор должен быть оснащен датчиками положения во всех степенях подвижности, а также средствами измерения декартовых координат рабочего органа. С этой целью в робототехнике обычно используются оптические и лазерные измерительные системы [34,45,48]. Современным примером решения задач стратегического уровня на базе НС может служить интеллектуальная система управления мобильным роботом РКАМС, созданная научно-исследовательской группой "Мехатроника" под руководством проф.Ф.Мора в Де Монтфортском университете (Великобритания) [51]. Мобильный робот РКАЫК базируется на подвижной трехколесной платформе ( передние два колеса имеют приводы) и оснащен комплексной информационной системой. В состав информационной системы входят 4 ультразвуковых сенсора, 4 датчика ближней локации и 4 датчика контакта, установленных на бампере. Система управления выполнена на базе бортового РС. Задачей робота является выполнение транспортных перемещений в средах с препятствиями ( прохождение коридоров, движение вдоль стен с обязательным исключением столкновений с внешними объектами). Для решения научно-технической задачи обучения нейронной сети на основе мультисенсорной информации было разработано оригинальное 10 95 Решение перечисленных проблем зачастую требует преодоления сложившихся на предприятии традиций в управлении и амбиций менеджеров среднего звена, привыкших решать только свои узкопрофильные задачи. Именно поэтому средние и малые предприятия, которые могут легко и гибко варьировать свою структуру, оказываются более подготовленными к переходу к производству мехатронной продукции. Приведенный анализ современных тенденций объективно и убедительно свидетельствуют о быстро возрастающем интересе к мехатронике и высокой активности специалистов в научно-исследовательской, образовательной и производственной сферах, что определяет перспективу развития мехатроники в XXI веке как одного из ключевых направлений современной науки и техники. Данная математическая модель нейрона легко реализуется на компьютере. В компьютерных моделях, как и в биологических системах, нейроны объединяются в сети, которые могут состоять из многих слоев и иметь различные структуры, включающие участки с последовательным, параллельным, с обратной связью и другими соединениями нейронов. На рис. 5.14 показан пример трехслойной нейронные сети с последовательным соединением слоев. Нейронные сети обучаются разработчиком системы на конкретных примерах. При обучении разработчик вводит информацию о входных и соответствующих (желаемых) выходных сигналах. Специальная программа настройки сети автоматически подбирает весовые коэффициенты для всех нейронов таким образом, чтобы добиться желаемого соответствия. Обучение разработчик повторяет на всех известных ему примерах, аккумулируя весь имеющийся предварительный опыт. Таким образом настроенная сеть готова к решению новых задач для других комбинаций входных сигналов. Главная особенность метода нейронных сетей состоит в том, что разработчик не должен программировать четкий алгоритм решения задач, а только задавать входные и выходные данные для обучения. 1 СЛОЙ 2 слой 3 слой 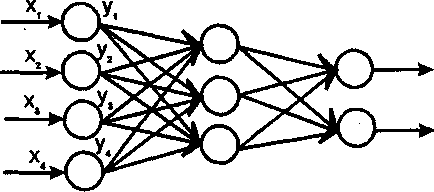 Рис.5.14. Трехслойная нейронная сеть. « Проблемы применения нейронных сетей на практике связаны с выбором типа нейронов (т.е. нелинейной функции 1), количества слоев и структуры сети для решения конкретной задачи с требуемой точностью. Контроллеры на основе НС эффективны в случаях, когда создание адекватной аналитической модели исполнительной системы и синтез на ее основе регуляторов крайне затруднен. Такая ситуация может быть обусловлена целым рядом факторов, среди которых наиболее распространенными являются:
12 93 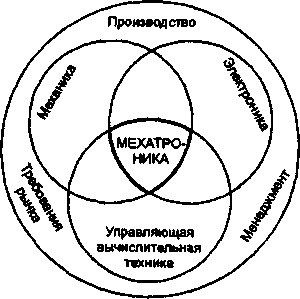 Таблица 5 .
| |||||||||||||||||||