Основы мехатроники
 Скачать 0.78 Mb. Скачать 0.78 Mb.
|

|
Л 84 Функции принадлежности допускают графическую интерпретацию, при этом по оси ординат может откладываться как числовая, так и лингвистическая переменная, причем возможно как непрерывное, так и дискретное представление функции. В качестве иллюстрации на рис.5.8 приведены графики функций принадлежности, описывающие для сигнала рассогласования е(т) в замкнутой системе (рис.5.7) нечеткое множество X = "Большая ошибка" (по оси абсцисс отложена безразмерная величина относительной ошибки еО). Лингвистические значения - это уровни, присвоенные описательной информации в результате экспертного опроса. Важно подчеркнуть, что они соответствуют числовой вероятностной функции, поэтому для их хранения в базе знаний можно использовать стандартные формы (например, двумерные массивы). Разработан математический аппарат, позволяющий выполнять над нечеткими множествами и функциями принадлежности все необходимые операции при фазификации, однако его изучение выходит за рамки данного пособия. Лингвистические правила управления (ЛПУ) рассмотрим на примере построения нечеткого ПИД-регулятора для управления скоростью движения мехатронного модуля (рис.5.7). Уравнение ПИД-регулятора в непрерывной форме имеет вид (5.10). Для малых периодов квантования Т это уравнение можно преобразовать в разностное, если заменить производную разностью первого порядка, а интеграл - суммой [12]. При использовании численного интегрирования по методу прямоугольников получаем для к-го шага управления: и(к) = Кп-е(к)+Ки -Т^е(г-1)+Кд -Г\е{к)-е{к-\)] (5 12) (=0 Для вычисления суммы на текущем 1-м шаге, входящей в данное уравнение , необходимо помнить все предыдущие значения сигнала ошибки е(к), к=0,...,1. Поэтому этот алгоритм мало эффективен для управления в реальном времени. Для получения рекуррентного алгоритма достаточно вычесть из уравнения (5.12) следующее уравнение: ^к-\)=Кп-е(]с-\)+Ки-Т-%}-\)лКдГ\е{к-Х)-е{к^ м В результате получим формулу для определения приращения управляющего сигнала: • Принципиальное различие мехатронного и традиционного подходов к проектированию и изготовлению модулей и машин с компьютерным управлением состоит в концепции технической реализации функциональных преобразователей. При традиционном проектировании интерфейсы представляют собой отдельные самостоятельные устройства и узлы. Обычно это сепаратные блоки, которые выпускаются специализированными фирмами, но зачастую отдельные элементы приходится изготавливать самим пользователям, особенно при сопряжении специализированных и нестандартных блоков МС. Производственная практика показала, что для монтажа и запуска сложных комплексов (например, гибких производственных систем) предприятия, которые, как правило, не имеют своих высококвалифицированных специалистов по системной интеграции, вынуждены обращаться к инжиниринговым фирмам, тем самым увеличивая свои затраты. Сравнивая блок-схемы, представленные на рис.2.3 и 2.4, можно прийти к выводу о том, что количество преобразующих ( в том числе интерфейсных) блоков в традиционной структуре машины с компьютерным управлением избыточно по отношению к минимально необходимому числу информационно-энергетических функциональных преобразований. Наличие избыточных блоков приводит к снижению надежности и точности мехатронной системы, ухудшению ее массогабаритных и стоимостных показателей. Идея минимизации промежуточных преобразований широко используется в инженерной практике при проектировании устройств и систем самого различного назначения. Характерным примером реализации этой инженерной идеи в бытовой технике является так называемая "видеодвойка" - моноблок, в состав которого входят телевизор и видеомагнитофон. Чем же руководствуются покупатели, отдавая в магазине предпочтение видеодвойке по сравнению с покупкой раздельно ТВ и видеомагнитофона? Во-первых, безусловно, ощутимый выигрыш в стоимости. Во-вторых, не надо разбираться с подключением кабелей и разъемов, а затем регулярно следить за надежностью этих соединений. В-третьих, имеют значение преимущество в габаритах, общий солидный корпус, удобство установки. Но при этом покупатель должен четко отдавать себе отчет в том, что видеодвойка - система негибкая, оба устройства могут эксплуатироваться и при необходимости ремонтироваться только совместно. Суть мехатронного подхода к проектированию состоит в интеграции в единый функциональный модуль двух или более элементов различной физической природы. Другими словами, на стадии проектирования из традиционной структуры машины исключается как сепаратное устройство по крайней мере один интерфейс при сохранении физической сущности 82 23 - рассчитывать идеальную реакцию по эталонной модели, • вычислять коэффициенты регулятора в соответствии с программой настройки, - определять текущую ошибку и выдавать сигнал управления на вход мехатронного модуля. Помимо рассмотренной блок-схемы с эталонной моделью известны и другие методы автоматической настройки параметров и структуры регуляторов, с которыми можно ознакомиться по специальной учебной литературе (например, [1,47]). 5.4.2. Нечеткие регуляторы исполнительного уровня Методологической основой для проектирования нечетких регуляторов является концепция нечеткой логики. С базовым математическим аппаратом и прикладными аспектами нечетких систем можно познакомиться по работам [27, 30,37], а с последними результатами -только по материалам текущей периодики, так как данная область теории управления начала быстро развиваться только в последнее время. В основе стандартных современных компьютеров лежит логика "четкого мира". Они работают только с двумя базовыми логическими переменными "Да" и "Нет" и детерминированными числовыми данными , поэтому свойства этого мира описываются совокупностями нулей и единиц Однако на практике очень часто приходится иметь дело с неопределенными, нестрогими свойствами объектов и процессов, которые не могут быть формализованы в понятиях "четкого мира". Общий смысл этих понятий нам очевиден, но сделать однозначный вывод о принадлежности конкретного объекта к данному множеству только с помощью слов "Да" и "Нет" зачастую затруднительно, необходимо узнать мнение нескольких экспертов. Английское слово "йкгу", буквально означающее "ворсистый", "пушистый" - специальный термин, определяющий свойство тканей. Рисунок ворсистой ткани кажется нам размытым, нечетким, неясно очерченным, что соответствует образам "нечеткого мира". Зададим студентам потока вопрос: "Сложным ли оказался для Вас курс "Основы мехатроники"? Среди ответов большинство окажется достаточно неопределенными: "Затрудняюсь ответить", "Не очень простым", "Скорее легким, чем трудным". Или другой типичный вопрос, который часто задают соискателям на заседаниях диссертационных советов - "Можно ли достоверно судить о процессах в реальной технической системе по исследованиям ее линеаризованной математической модели?". И здесь, как правило, ответ содержит положения вероятностного характера. , В табл.1 мехатронные модули классифицированы по набору вошедших в их состав базового и дополняющих элементов (столбцы 1 и 2). В третьем столбце указаны интерфейсы, которые при проектировании исключаются как сепаратные блоки из традиционной структуры (рис.2.4). В таблице не рассматриваются интерфейсы И1 и И7, которые являются по сути входными для мехатронного модуля, так как связывают его с источниками внешних сигналов и воздействий. Особенности построения интерфейсов И1, И2, И4 для устройства компьютерного управления подробно рассмотрены в следующей главе (п.3.5). Важно подчеркнуть, что на практике целесообразно строить мехатронный модуль, опираясь сразу на несколько точек интеграции, и создание именно таких модулей представляет наибольший интерес с теоретической и прикладной точек зрения для мехатроники как новой области науки и техники. Безусловно, данная таблица не исчерпывает всех возможных способов объединения элементов в МС и оставляет большое поле для научного поиска и инженерного творчества. Принципы построения, конструктивные схемы и технические описания современных мехатронных модулей указанных классов и мехатронных систем на их основе даны соответственно в гл. 3 и 4. 80 25 пять основных регуляторов: регулятор положения (РП), регулятор скорости (РС), регулятор момента или силы (РМ), регулятор прямой связи по скорости изменения управляющего воздействия (РПСС) и регулятор корректирующей связи по возмущающему воздействию (РСВВ). Входными воздействиями для системы могут быть в зависимости от поставленной цели управления управляющие сигналы по положению, скорости, либо по развиваемому усилию. В системе реализуется принцип замкнутого управления, что предусматривает наличие соответствующих обратных связей по фазовым координатам системы. Методика структурного и параметрического синтеза регуляторов исполнительных приводов подробно дана, например, в учебном пособии [15]. Наиболее общим является алгоритм ПИД-регулирования, когда выходной сигнал описывается выражением: «(*) = Кп ■ еЦ) + Кд-^ + Ки- \еЦ)■ <И(510) "' о где Кп, Кд, Ки - коэффициенты, соответственно, пропорциональной, дифференциальной и интегральной составляющих сигнала, е(1) - сигнал ошибки в данном контуре управления (положения, скорости или момента). В конкретных случаях некоторые из этих коэффициентов можно положить равными нулю, фактически применяя упрощенные алгоритмы управления (П-алгоритм, ПИ-алгоритм и т.д.). Традиционный подход предусматривает, что структура и коэффициенты всех корректирующих устройств определяются при проектировании системы и далее остаются фиксированными в процессе ее эксплуатации. В современных системах управления вид и параметры регуляторов автоматически модифицируются в зависимости от цели конкретного движения и условий, в которых оно фактически осуществляется. Это позволяет адаптировать (приспособить) движение мехатрошюй системы к начальной неопределенности и изменяющимся условиям работы. Следуя подходу проф.Я.З.Цыпкина [50], адаптация по существу есть оптимизация в условиях недостаточной априорной информации. Адаптивная настройка регуляторов необходима, если введенные отрицательные обратные связи в исполнительных приводах не способны парировать влияние возмущающих воздействий и изменения параметров (и, возможно, структуры) объекта управления, которые вызывают недопустимое снижение показателей качества управляемого движения. Разработчик должен отдавать себе отчет в том, что адаптивные регуляторы по сравнению с традиционными имеют существенно более сложную структуру и техническую реализацию, их проектирование требует решения целого ряда теоретических проблем управления. Поэтому решение о 3.2. Мехатронные модули вращательного движения на базе высокомоментных двигателей Следующим шагом в развитии приводной техники стало появление высокомоментных двигателей вращательного движения, применение которых позволило вообще исключить механический редуктор из состава электроприводов постоянного тока, работающих на низких скоростях. Высокомоментными называются двигатели постоянного тока с возбуждением от постоянных магнитов и электронной коммутацией обмоток, которые допускают многократную перегрузку по моменту. Для определения положения полюсов на роторе вентильного ВМД устанавливают дополнительные технические средства (например, датчики Холла, индуктивные и фотоэлектрические датчики) [2, 17,19, 46]. Обычно высокомоментные двигатели (ВМД) устойчиво работают на частотах вращения 0.1-1 1/мин, которые типичны для металлорежущих станов и промышленных роботов. Основные преимущества ВМД определяются отсутствием в приводе редуктора:
ВМД выпускаются в настоящее время коллекторного и вентильного (иногда используется термин «бесщеточного», либо «бесконтактного») типов. Основные преимущества вентильных двигателей по сравнению с коллекторными: - высокая надежность, большой срок службы, минимальные затраты на обслуживание (вследствие исключения искрения и износа щеток);
76 29 Тахогенератор 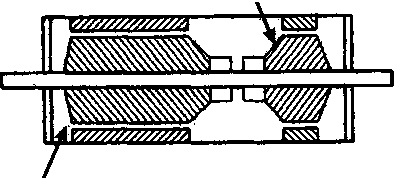 в методической разработке [40]. Важно подчеркнуть, что структура и форматы языков управления движением существенно отличаются от универсальных языков программирования (типа С++, Паскаль и т.п.), хотя отдельные операторы могут и совпадать (например, операторы задания цикла и логические функции). в методической разработке [40]. Важно подчеркнуть, что структура и форматы языков управления движением существенно отличаются от универсальных языков программирования (типа С++, Паскаль и т.п.), хотя отдельные операторы могут и совпадать (например, операторы задания цикла и логические функции). Тактический уровень выполняет преобразование команд управления движением, поступающих со стратегического уровня управления, в программу управления, которая определяет законы согласованного движения во времени всех звеньев механического устройства с учетом технических характеристик блока приводов (в первую очередь ограничений на обобщенные скорости, ускорения и силы). Таблица 4
Двигатель Рис. 3.3. Мехатронный модуль «двигатель - тахогенератор». На рис.3.4 показана конструкция мехатронного модуля Г)упа8егу МоЮг, разработанного фирмой РАЕКЕК. Сотр. На базе высокомоментного двигателя [59]. В состав модуля входят: ротор двигателя, статор двигателя, подшипник, фотоимпульсный датчик. Вращающейся является внешняя часть модуля, которая базируется на опорных подшипниках. Модули комплектуются также электрическим кабелем. Вращающаяся "часть Редуктор Фотоимпульсный 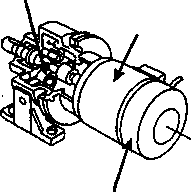 д 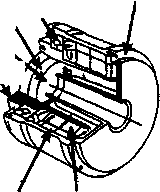 атчик подшипник атчик подшипникДвигатель \ Крышка Датчик Статору Например, для позиционного управления манипулятором РЦМА-560 (рис.5.2) задана команда 00_А (см. табл.4). Для выполнения этой команды управления движением на тактическом уровне необходимо определить обобщенные координаты манипулятора, которые соответствуют желаемым декартовым координатам характеристической точки схвата. Для этого должна быть решена обратная задача о положении манипулятора в точке А (см. (5.3)). Соответственно, для управления скоростью движения программа управления строится как результат решения обратной задачи о скорости рабочего органа (см. ур. (5.7)). Для реализации данных алгоритмов Рис. 3.4. Мехатронный модуль Бупаяегу Моюг Основные технические характеристики мехатронных модулей Вупавегу Мо1ог серии БМ: габаритные размеры модуля - длина до 295 мм, диаметр от 150 до 250 мм, масса модуля - от 5.5 до 29 кг, |