Основы мехатроники
 Скачать 0.78 Mb. Скачать 0.78 Mb.
|

|
Я = со1(хр,ур,2р1ах,ау,аг)(5.1) Первые три компоненты данного вектора - это декартовые координаты полюса Р рабочего органа, а три последние представляют собой углы (например, эйлеровы углы), определяющие ориентацию связанной с рабочим органом системы координат РХпУп2п относительно базовых осей. Обозначим как вектор-столбец обобщенных координат механизма Я = соЦЯ1,Я2,...,Яп) величины перемещений шести винтов ШВП. Тогда компоненты вектора (5.1) однозначно можно найти по вектору обобщенных координат (прямая задача о положении механизма): Х = *«1).(5.2) Тогда обратная задача о положении механизма состоит в решении системы (5.2) относительно вектора обобщенных координат: <} = Г1(Х).(5.3) Математически аналогично выглядит постановка обратной задачи о положении рабочего органа для машшуляционных механизмов. Например, для манипулятора РЦМА-560 в качестве обобщенных координат принято выбирать углы поворота соответствующих шарниров (рис.5.2): ц! - поворот колонны, ф - качание плеча, ^3 - качание локтя; <$,ф и ф - повороты кистевых степеней подвижности.
(а). Блок-схема контроллера движения (ПЗУ - постоянное запоминающее устройство, ОЗУ - оперативное запоминающее устройство, ШИМ - широтно-импульсный модулятор, ИП - источник питания). 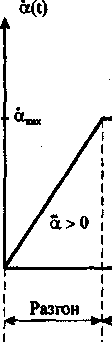 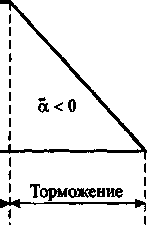 а = 0 -► I Постоянная скорость (б). Типовой закон движения Рис. 3.8 Устройство компьютерного управления с внешним контроллером движения 64  ГЛАВА 5. Проблематика и современные методы управления мехатронными модулями н системами ГЛАВА 5. Проблематика и современные методы управления мехатронными модулями н системамиЦель данной главы - ввести читателя в круг современных проблем управления мехатронными модулями и системами. Естественно, что даже конспективно объять тематику управления в мехатронике в одной главе невозможно. Поэтому в начале акцентируем внимание на особенности постановки задач и организации систем управления. Далее конспективно перечислим общие признаки интеллектуальных систем управления движением (п.5.2) и рассмотрим конкретные примеры (п.5.3), иллюстрирующие применение новых подходов и методов управления в мехатронике. Материал подобран таким образом, что для его освоения достаточно знания теории управления в объеме типового общепрофессионального курса. При этом предполагается, что общие теоретические проблемы интеллектуального управления, вопросы синтеза цифровых систем управления, способы их программно-аппаратной реализации в реальном времени, построения математических и компьютерных моделей управляемых мехатронных модулей, управления и программирования распределенных систем будут рассмотрены в специальных учебных курсах. 5.1. Особенности постановки задач управления мехатронными системами Постановку проблемы будем рассматривать применительно к мехатронным системам, которые используются в производственных машинах и комплексах автоматизированного машиностроения как основное технологическое оборудование. К таким системам управления предъявляются, как правило, весьма жесткие требования, так как режимы управления определяют ход технологического процесса и, следовательно, качество получаемого изделия. Именно задачи компьютерного управления технологическими машинами, которые не могли быть решены на базе традиционных подходов, стимулировали разработку и внедрение в практику принципиально новых методов управления. Как было отмечено в гл.2, в общем случае в мехатронике ставится задача управления координированными функциональными движениями машин. Однако в данном пособии ограничимся рассмотрением вопросов управления только механическими движениями мехатронных систем. Обратимся к блок-схеме машины с компьютерным управлением (рис.2.2, 2.4). Задача управления машиной состоит в исполнении желаемого движения рабочего органа, который целенаправленно действует на объект работ, испытывая при этом со стороны внешней среды представителями этих приборов являются силовые полевые транзисторы (М08РЕТ), биполярные транзисторы с изолированным затвором (ЮВТ), запираемые тиристоры с полевым управлением (МСТ). Новое поколение приборов отличается высоком быстродействием (для транзисторов ЮВТ частота коммутации составляет до 50 000 Гц, для транзисторов МОЗРЕТ -100 000 Гц), высокими значениями коммутируемых токов н напряжений (для ЮВТ: предельная сила коммутируемого тока - до 1200 А, предельное коммутируемое напряжение -до 3500 В), малая мощность управления. В состав ИСМ входят, кроме традиционных приборов силовой электроники (ключей на базе силовых транзисторов или тиристоров, диодов и др.), элементы микроэлектроники, предназначенные для выполнения интеллектуальных функций - управление движением, защита в аварийных режимах и диагностика неисправностей. Использование ИСМ в составе приводов мехатронных модулей позволяет существенно снизить массогабаритные показатели силовых преобразователей, повысить их надежность при эксплуатации, улучшить технико-экономические показатели. В последние годы рынок интеллектуальных силовых модулей быстро развивается и в 2000 году ожидается значительный скачок в его росте. 3.5.3. Интеллектуальные сенсоры мехатронных модулей и систем Целью создания интеллектуальных сенсоров является объединение функций измерения текущих параметров механического движения, их преобразования и компьютерной обработки по заданным алгоритмам в едином информационно-измерительном модуле. Со структурной точки зрения речь идет об интеграции сенсорного и компьютерного блоков мехатронного модуля (интерфейс ИЗ на рис.2.4). Интеллектуализация сенсоров позволяет добиться более высокой точности измерения, программным путем обеспечив в самом сенсорном модуле фильтрацию шумов, калибровку, линеаризацию характеристик вход/выход, компенсацию перекрестных связей, гистерезиса и дрейфа нуля. В мехатронных модулях сенсоры предназначены для сбора данных о фактическом состоянии элементов движущейся системы (исполнительного привода, механического устройства и рабочего органа), обработки в реальном времени и передачи сигналов обратной связи в устройство компьютерного управления. К типичными измеряемым величинам, информация о которых используется при управлении мехатронными модулями и системами, относятся: перемещение (линейное или угловое), скорость, ускорение и моменты, развиваемые исполнительными двигателями; внешние усилия, действующие на рабочий орган (например, на шпиндель модулей, 62 43   машинах специального прецизионного исполнения эти показатели достигают соответственно 0.3мм и 0.5 мм (при размерах Ь=500мм). Измерения выполняются с помощью специальной головки-щупа, оснащенной датчиками механического или токового касания. Контактное усилие при токовом касании не превышает 0.0003 Н, что позволяет измерять податливые и мелкоструктурные детали. машинах специального прецизионного исполнения эти показатели достигают соответственно 0.3мм и 0.5 мм (при размерах Ь=500мм). Измерения выполняются с помощью специальной головки-щупа, оснащенной датчиками механического или токового касания. Контактное усилие при токовом касании не превышает 0.0003 Н, что позволяет измерять податливые и мелкоструктурные детали.Дальнейшее развитие технологических машин-гексаподов связано с применением интеллектуальных линейных мехатронных модулей, а также с созданием эффективного математического и программного обеспечения для решения задач планирования и управления их движением в реальном времени. 4.5. Транспортные мехатронные средства Мехатронные модули находят все более широкое применение в различных транспортных системах. В данном пособии ограничимся кратким анализом только легких транспортных средств (ЛТС) с электроприводом ( иногда их называют нетрадиционными). К этой новой для отечественной промышленности группе транспортных средств относятся электровелосипеды, роллеры, инвалидные коляски, электромобили с автономными источниками питания. Разработку таких мехатронных систем ведет Научно-инженерный центр "Мехатроника" в кооперации с рядом организаций [3,5,24]. ЛТС являются альтернативой транспорту с двигателями внутреннего сгорания и используются в настоящее время в экологически чистых зонах (лечебно-оздоровительных, туристических, выставочных, парковых комплексах), а также в торговых и складских помещениях. Рассмотрим технические характеристики опытного образца электровелосипеда:
Основой для создания ЛТС являются мехатронные модули типа "мотор-колесо" (см.п.3.4) на базе, как правило, высокомоментных электродвигателей. В табл.3 приведены технические характеристики мехатронных модулей движения для легких транспортных средств (данные по статье [4]). Примером технического воплощения этой тенденции является вращательный инкодер серии АК. ( разработка фирмы Рагкег [59]). Ниже приведены его некоторые технические характеристики: разрешающая способность 1024 позиций/об или 16384 позиций/об (выбирается и масштабируется пользователем с помощью микропроцессора); максимальное число позиций - 8 388 608 (достигается применением дополнительных дисков и переходом к многооборотному режиму работы); погрешность не более 5.5 угл. Мин; скорость вращения до 5000 об/мин; габариты : длина 87 мм, диаметр 60 мм; масса 0.45 кг. Интеграционная направленность мехатроники стимулирует развитие так называемых гибридных технологий для производства особо компактных и миниатюрных модулей. Гибридные технологии предусматривают использование единых материалов (в первую очередь полупроводниковых - например, кремния) как для механических, так и для микроэлектронных компонент. Это позволяет радикально уменьшать размеры модуля без увеличения его стоимости, что практически невозможно при традиционных производственных технологиях. Серийно выпускает сенсоры для определения параметров механического движения на основе гибридных технологий фирма Апа1о§ Бетое [61]. В качестве примера рассмотрим датчик ускорения модели АОХЬ05, который может использоваться как в мехатронных модулях, так и в системах вибродиагностики н защитной сигнализации. Акселерометр представляет собой интегральную микросхему (диаметр корпуса 9.4 мм, высота 4.7 мм) в герметичном исполнении, которая имеет 10 выводов. Диапазон измеряемых ускорений может быть выбран пользователем от ± 1§ до ± 5д соответственно с выходным сигналом от 200 тУ/д до 1 М1%. Выход акселерометра непосредственно подключается к АЦП без каких-либо дополнительных активных элементов. В состав сенсора входят следующие основные блоки: датчик ускорения (включает общую вибрирующую пластину и 46 дополнительных элементов), генератор, демодуляторы, источник питания, предварительный и буферный усилители, а также ряд пассивных элементов (резисторов и конденсаторов) для настройки. Действие акселерометра основано на принципе дифференциального емкостного преобразователя, т.е. блока конденсаторов, электрические параметры которого изменяются под действием измеряемого воздействия [13]. Рассмотренный датчик модели АОХЬ05 может использоваться в однокоординатных мехатронных модулях, так как измеряет только одну компоненту вектора ускорения. Для многомерных мехатронных. систем 60 45  - высокая степень унификации мехатронных узлов, обеспечивающая технологичность изготовления и сборки машины и конструктивную гибкость; - высокая степень унификации мехатронных узлов, обеспечивающая технологичность изготовления и сборки машины и конструктивную гибкость;высокое качество управления движением благодаря малой инерционности механизмов, применению линейных мехатронных модулей движения как объектов управления, использованию методов Рис. 4.6. Общий вид станка-гексапода. автоматизированной подготовки и исполнения в реальном времени управляющих программ, наличию дружелюбного интерфейса "человек -машина". 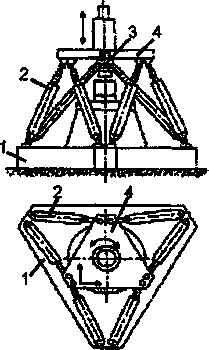 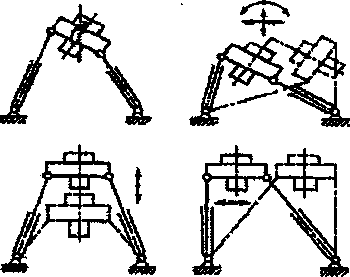 предложенный в работе [60] проект интеллектуальной авторучки, позволяющей писать на бумаге с одновременным вводом текста в компьютер. Для кодирования графической информации используются пьезоэлектрический датчик силы/ускорения и датчик угла наклона ручки. Размещение как чувствительных элементов пьезодатчика, так и всех электронных цепей на одном кремниевом кристалле позволит, по мнению авторов, добиться желаемых габаритов авторучки ( не превышающих размеров обычного маркера) при доступной для потребителя цене. Интересным направлением является применение в интеллектуальных мехатронных модулях косвенных методов измерения параметров механического движения. В этом случае можно вообще отказаться от установки типичных датчиков (даже встроенных), добиваясь минимальных габаритов и материалоемкости модуля. Величины скорости, положения, действующего момента рассчитываются компьютерным блоком по математическим моделям протекающих электромеханических процессов (поэтому иногда применяется термин "виртуальные датчики"). Хорошо известен способ косвенного определения момента, развиваемого двигателем постоянного тока, по пропорциональной величине тока в якорной цепи, который часто используется в промышленных приводах. В последнее время разработан ряд методов и устройств косвенного измерения скорости электродвигателей. Так, стабилизировать скорость вращения асинхронного двигателя можно без установки датчика скорости на его валу, поддерживая в обмотке статора отношение тока к напряжению на заданном уровне с помощью обратной связи по току статора. Для трехфазных вентильных двигателей малой мощности разработан метод коммутации обмоток по ЭДС вращения, позволивший устранить традиционные датчики положения ротора из конструкции двигателя. Все методы косвенного измерения требуют построения адекватных математических моделей и их эффективной компьютерной реализации в реальном времени, включая алгоритмы фильтрации помех, статистической обработки измерений и цифрового кодирования информации. Появление на рынке быстродействующих и недорогих встроенных микропроцессорных средств делает эти методы перспективными для интеллектуальных мехатронных модулей - модулей нового поколения. Рис. 4.7. Конфигурация станка-гексапода. 58 47   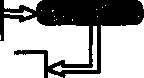 (Ж-Нпе О) САПР конструктора (]г) САПР технолога (пакет Маз1егсат) Техпроцесс Инструмент Планирование траектории Постпроцессор 41 ' (5)Интерфейс Оп-Мпе 
Рис. 4.5. Блок-схема комплекса программирования движений. Задача программирования движения манипулятора решается в четыре основных этапа, при этом первые два выполняются на ЭВМ верхнего уровня, что позволяет не выключать РТК из производственного процесса. Этап 1. Разработка компьютерной модели детали в среде Ашо САБ. С помощью САПР конструктора выполняется чертеж обрабатываемой детали, либо выбирается стандартная графическая модель из библиотеки. Компьютерная модель записывается в файл в формате ОХР или ЮЕЗ. Этап 2. Планирование движений робототехнической системы. В качестве базового программного обеспечения использован интерактивный пакет МА5ТЕКСАМ, позволяющий в режиме диалога задавать траекторию движения и желаемую ориентацию рабочего органа в декартовой системе координат, закон движения во времени, команды на вспомогательное технологическое оборудование. При этом могут применяться проверочные и оптимизационные процедуры, которые учитывают кинематические, динамические, энергетические и другие особенности конкретного манипулятора. Полученный файл во внутреннем формате N01 далее поступает для обработки на постпроцессор. Постпроцессор - это специальная программа, которая автоматически генерирует управляющую программу, готовую для загрузки и исполнения устройством управления робота( в данной системе внутренним языком является АКР8). Этап 3. Автоматическая загрузка управляющей программы. На этом этапе осуществляется пооператорная загрузка программы в устройство управления "Сфера-36". При этом стойка управления и компьютер соединены через последовательный порт по протоколу К5-232. при этом очевидны выгоды в гарантийном и сервисном обслуживан  Рис. 4.1.Общий вид мобильных роботов. Общий вид роботов фирмы "ТАРИС" показан на рис.4.1. Осмотровый робот Р-200 предназначен для телеинспекции трубопроводов диаметром от 150 до 1200 мм. Этот мобильный робот имеет набор сменных колес и цветную поворотную телекамеру. Управляется робот дистанционно оператором с поста управления, размещенного в автомобиле (длина кабеля до 200 м). Пост управления имеет цветной монитор и цифровую систему документирования на базе компьютера в промышленном исполнении. Телекамера оснащена устройством наведения (механизмы качания, ротации и подъема) для осмотра стенок трубы, блоками основного и дополнительного освещения, электромеханический стеклоочиститель, а также имеет дистанционный привод фокусировки. Робот имеет герметичное исполнение, способен работать с погружением в воду, корпус накачивается азотом для предотвращения конденсации влаги внутри него и запотевания стекол телекамеры. Приводы перемещения представляют собой мехатронные модули типа "мотор-колесо" на базе двигателей постоянного тока. Схема телеинспекции показана на рис.4.2, а. Помимо системы технического зрения робот оснащен датчиком пути, датчиком углов крена и дифферента корпуса, датчиками углов ориентации телекамеры. Эти сенсоры необходимы не только для управления движением робота, но и для трассировки залегания трубопровода, дают информацию о профиле трубы и координатах дефекта (свища, трещины) или обнаруженного постороннего предмета. 56 49  тормозами и инкрементальными инкодерами в качестве датчиков тормозами и инкрементальными инкодерами в качестве датчиковобратной связи. Грузоподъемность робота 2,5 кг, точность позиционирования 0,1 мм. Устройство управления "Сфера-36" предназначено для позиционно- контурного управления функциональными движениями манипулятора и имеет архитектуру типа "компьютер - внешний контроллер" для управления исполнительными приводами. Система является многопроцессорной и двухуровневой: она содержит центральный процессор и шесть процессоров приводов. Модули устройства имеют унифицированные шины внутренней связи (типа С*-1Ш8) и стандартный интерфейс связи с технологическим оборудованием. Подробно технические характеристики манипулятора РЦМА-560 и устройства управления типа "Сфера" приведены в методической разработке [40]. Устройство силомоментного очувствления (УСМО) состоит из двух функциональных модулей: датчика силы и блока обработки силомоментной информации. Датчик силы конструктивно выполнен в виде плоских крестообразных пластин, на грани которых наклеены тензорезисторы. Конструкция датчика предусматривает измерение трех компонент вектора силы, действующей на рабочий орган робота: силы, перпендикулярной фланцу датчика силы (Рг), и двух моментов в плоскости фланца (Мх и Му). В качестве чувствительных элементов выбраны фольговые тензорезисторы типа КФ 5Ш-3200-А12. Датчик изготовлен из алюминиевого сплава Д16-Т, обладающего высоким значением модуля Юнга и малой удельной массой. Блок обработки силомоментной информации предназначен для преобразования сигналов с тензоусилителя в три информационных сигнала о векторе сил, действующем на рабочий орган. Блок выполнен в виде отдельной платы и установлен в корпус тензоусилителя. Технические характеристики устройства силомоментного очувствления в целом таковы:
При управлении роботом на операциях механообработки основная функция компьютера состоит в обработке сигналов от датчика силомоментного очувствления и выработке сигналов коррекции движения. Если датчик сил и моментов содержит встроенный микропроцессор, то организация обмена информацией с компьютером не представляет труда. В противном случае необходимо использовать многофункциональный адаптер (МА), который осуществляет согласование Автоматическое принятие решений роботом, без непосредственного участия человека-оператора, целесообразно на следующих операциях: - обнаружение и распознавание постороннего объекта в трубопроводе с использованием информации системы технического зрения (СТЗ) и локационных датчиков;
- диагностика и измерение толщины стенки трубы. 4.2. Лазерный робототехнологический комплекс Робототехнологический комплекс (РТК) предназначен для лазерной резки сложных контуров на горизонтальной плоскости. Комплекс разработан на кафедре робототехники и мехатроники МГТУ СТАНКИН и внедрен в промышленности в 1996-97 годах. Общий вид комплекса показан на рис.4.3. В состав комплекса входят: манипулятор с кинематической схемой 8САКА, твердотельный лазер как рабочий орган, компьютер типа ШМ РС со встроенным контроллером движения и системой графического программирования в среде ЬаЪУ1е^ [20].  Рис.4,3. Лазерный роботоггаяюгагичаский комплекс Робот используется для контурного перемещения резака в рабочей зоне. Выбранная кинематическая схема обеспечивает высокую точность движения манипулятора (отклонение от программной траектории не более 0.05 мм при максимальной скорости 0.7 м/с), привод - электрический. 54 51 ТЕХНОЛОГИЯ, ОБОРУДОВАНИЕ И АВТОМАТИЗАЦИЯ АШИНОСТРОИТЕЛЬНЫХ  РОИЗВОДСТВ РЕДАКЦИОННАЯ КОЛЛЕГИЯ Член - корреспондент РАН Ю.М. Соломенцев - председатель, профессор Ю.В. Копыленко - зам. председателя, профессор А.Г. Схиртладзе - ответственный секретарь, профессор Г.Н. Андреев, профессор В.В. Бушуев, доцент В.Н. Гусев, профессор А.А. Кутин, профессор В.Г. Митрофанов, профессор В.Л. Сосонкин Н.М. Тшценко Учебно-методическое объединение по образованию в области автоматизированного машиностроения 1 Указатель английских терминов Аауапсес! пНеищеп!; сошго1 тешсч]з - методы интеллектуального управления Апаше сотташ1з ВгозЫезз Лтуег исполнения С1озеа 1оор зуз^ет Сопсшгеш еп§теегш§ тешоёз • аналоговые командные сигналы - двигатель бесщеточного УДК 681.323-181.4:621.865.8(075) П44 Рецензенты: Кафедра специальной робототехники и мехатроники Московского государственного технического университета им.Н.Э.Баумана Доктор технических наук, профессор Овакимов А.Г. Подураев Ю.В. Основы мехатроники: Учебное пособие. - М.: МГТУ "СТАНКИН", 2000 - 80 с: ил.38, табл.5, библ. 66 назв. Рассмотрены предпосылки развития и перспективные области применения мехатроники, изложены концепция построения, структура и принципы интеграции мехатронных систем, приведены методы построения и технические характеристики современных мехатронных модулей и систем, рассмотрена проблематика и современные методы интеллектуального управления в мехатронике. Учебное пособие предназначено для студентов и аспирантов различных технических направлений и специальностей, а также для научно-технических работников, интересующихся мехатроникой. Табл. 5 Рис.38 Библиогр. 66 назв. © Ю.В.Подураев, 2000 © МГТУ "СТАНКИН", 2000 ГЛгес* апуег БЗР-ргосеззог процессор Епсойег Ритгу 1одю Ноз1 сотри1ег ЫеШ§еп1 ро\уег тоаикз (1РМ) модули Мап-тасЬше йиегГасе (ММ1) интерфейс Маз1ег/з1ауе тойош Моиоп сошгоИег МесЬап-ошсз ОЯЧше рго§гаттш§ Оп-1ше рго§гаттт8 время Ореп 1оор зуз1:ет управления Р1и§-ш сага компьютера РошМо-рош1 сопогЛ Зтай зепзогз -8(аш1-а1опе соп(го11егз - замкнутая система управления - методы параллельного проектирования
- нечеткая логика - компьютер верхнего уровня - интеллектуальные силовые - человеко-машинный
ее движения
- интеллектуальные сенсоры • сепаратные контроллеры 103 ПРЕДИСЛОВИЕ В последние годы возникла и бурно развивается во всем мире новая отрасль науки и техники - мехатроника. Мехатроника базируется на знаниях в области механики, электроники, современных методах компьютерного управления и обработки информации. Мехатронные модули и системы становятся основой для создания технологических машин и агрегатов, обладающих качественно новыми свойствами для различных отраслей промышленности, а также они могут быть использованы при разработке периферийных устройств для компьютерной, офисной и бытовой техники, нетрадиционных транспортных средств, медицинского оборудования, микромашин и других современных технических систем. Учебное пособие предназначено для студентов, магистров и аспирантов различных технических направлений и специальностей, изучающих мехатронику. Оно также может быть полезно специалистам, работающим в области автоматизированного машиностроения. Целью настоящего учебного пособия является изложение современных принципов построения и применения мехатронных систем. Основной акцент сделан на концептуальных вопросах интеграции механических, электронных и компьютерных элементов в единые модули и системы как ключевого принципа мехатроники. В основу пособия положен лекционный курс "Основы мехатроники", прочитанный автором в 1997-98 г.г. в Московском государственном технологическом университете "СТАНКИН" для студентов кафедры робототехники и мехатроники, а также ряд его научно-технических публикаций в отечественных и зарубежных изданиях за последние три года. Изучение пособия предполагает знание студентами следующих базовых дисциплин: "Механика управляемых машин", "Теоретическая электротехника", "Электроника", "Микропроцессорная техника", "Теория автоматического управления", "Информационные устройства систем автоматики", "Информационные технологии", "Моделирование процессов и систем", а также вводного курса в инженерную специальность. Изучение курса "Основы мехатроники" в МГТУ "СТАНКИН" предусматривает подготовку и публичную защиту на семинарах студентами рефератов, примерный список тем для которых приведен в приложении. При написании рефератов рекомендуется использовать не только учебную литературу, но и материалы текущих научно-технических печатных и электронных изданий. Для
Еайоге: М.Асаг, .ГМасга, Е.Реппеу, Сотрщапопа1 МесЬашсз РиЫ., 1994.
61. Зцта1 СЫр Ассе1еготе1ег \яш $1§да1 Сопашопшд. Апа1о@ Е)еуке, шс, 1996.
66. Мооге Р.К.. ийеепйеа Бевцт, 8шш1апоп апа ОхзптЪшеа' Сошго1 о!" А§Ле Моспиаг Мапигасшпп§ МасЫпегу. / Ргосееашез о1"2-пд Ьй. АМмкзпор оп 1п1еШ§еп1 Мапшасшгш§ 8у$1етз, Ьеиуеп, 1999. Приложение Примерные темы рефератов по курсу "Основы мехатроники" | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||