Отчёт по плавательной практике. Отчет по плавательной практике курсант 4 курса Радиотехнического отделения Группы эм421
 Скачать 4.27 Mb. Скачать 4.27 Mb.
|

|
Электромагнитный механизм приемника состоит из трех электромагнитов с парой катушек на каждом. Электромагниты, так же как и щетки датчика, расположены под углом 120° относительно друг друга. Против полюсов каждой пары катушек размещены железные якорьки.  При последовательных замыканиях цепи каждой пары катушек коммутатором передатчика железные якорьки притягиваются сердечниками электромагнитов. Эти поочередные притяжения оказывают при помощи тяги и кривошипа воздействие на стрелку. При последовательных замыканиях цепи каждой пары катушек коммутатором передатчика железные якорьки притягиваются сердечниками электромагнитов. Эти поочередные притяжения оказывают при помощи тяги и кривошипа воздействие на стрелку.Перемещение стрелки приемника будет соответствовать тому углу, на который был повернут коммутатор передатчика, или, как говорят, стрелка будет показывать переданный угол. При устройстве машинных и котельных телеграфов, основанных на этом принципе, на командном пункте устанавливаются датчик для передачи приказаний и приемник для получения сигнала о принятии приказания, а в машинно-котельном отделении помещаются приемник для получения приказания и датчик для посылки сигнала о принятии приказания. Таким образом, и на командном пункте, и в машинно-котельном отделении устанавливается по два аппарата (датчик и приемник), причем датчик командного пункта соединяется проводами с приемником машинно-котельного отделения, а датчик машинно-котельного отделения — с приемником командного пункта. Схемой машинного телеграфа обычно предусматриваются, кроме зрительного сигнала (поворот стрелки приемника), также те или иные звуковые сигналы (ревуны, трещотки). Этим увеличивается надежность передачи приказаний и контроля за их исполнением. При устройстве основанных на этом принципе указателей поворота руля (аксиометров) датчик при помощи тяг соединяется с рулевым приводом. Соединенные с датчиком проводами приемники (указатели положения руля) устанавливаются в рубке и на мостике судна. Работающие на постоянном токе указатели числа оборотов главных двигателей (электрические тахометры) имеют датчик— генератор постоянного тока с постоянными магнитами и приемник —вольтметр постоянного тока магнито-электрической системы со шкалой, проградуированной не в вольтах, а непосредственно в числах оборотов в минуту. Якорь магнитомашинки (датчика) связывается цепью Галля (роликовая цепь) с валом двигателя, скорость которого желают измерить. Поэтому при вращении вала двигателя магнитомашинка будет создавать электрический ток, напряжение которого в каждый данный момент соответствует числу оборотов двигателя: чем больше число оборотов, тем больше напряжение. Доходя по проводам до приемника (вольтметра), этот ток будет отклонять стрелку на угол тем больший, чем больше в данный момент напряжение, т. е. чем больше число оборотов двигателя. Из указателей, работающих на переменном токе, рассмотрим такие, устройство которых основано напринципе самосинхронизирующейся синхронной передачи. Эти указатели являются весьма надежными в работе и могут применяться для контроля состояния наиболее ответственных судовых механизмов, в частности, для указания положения клинкетов затопления на плавучих доках. При этой синхронной передаче датчиком и приемником служат два индукционных электродвигателя, питающихся переменным током и соединенных между собой и с сетью так, как показано на рис. 4. 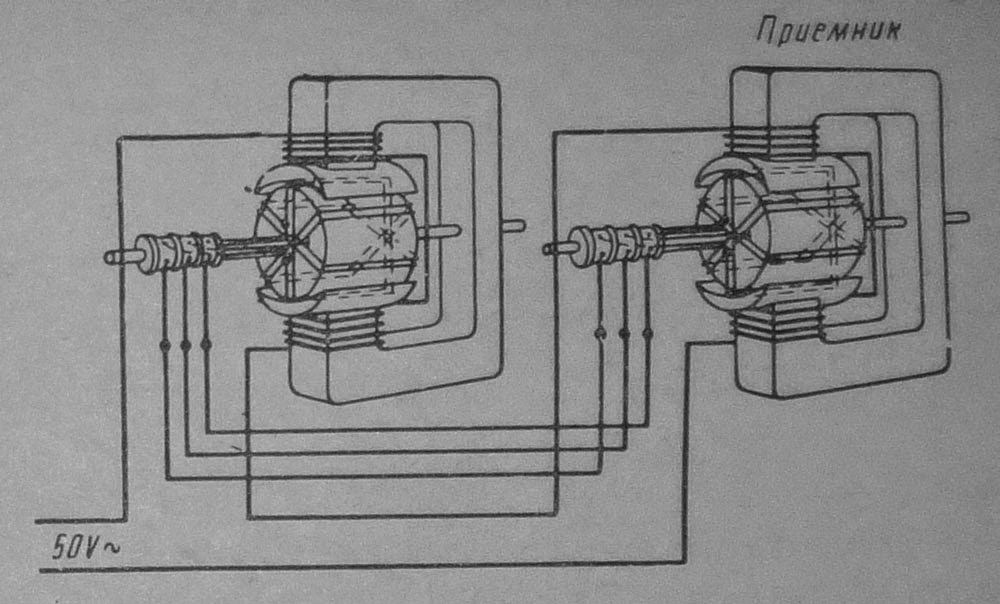 Рис. 4. Два индукционных электродвигателя в синхронной передаче Якоря этих двигателей имеют трехфазную обмотку, а магниты — однофазную. Обмотки магнитов двигателей подключены к сети переменного тока, а обмотки якорей соединены между собой таким образом, что электродвижущие силы, индуктируемые в них переменными полями магнитов, направлены навстречу друг другу. Вследствие такого равновесия электродвижущих сил ток по обмоткам якорей не проходит, и якоря остаются поэтому неподвижными. Если же какой-либо внешней силой повернуть якорь датчика на некоторый угол, то электродвижущая сила в его обмотке изменится по своей величине, и равновесие, существовавшее между противоположно направленными электродвижущими силами якорей датчика и приемника, будет нарушено. Вследствие получившейся при этом разницы в напряжениях обмоток якорей между ними возникает уравнительный ток. Взаимодействуя с магнитным полем приемника, этот ток заставит его якорь повернуться на такой же угол, на который был повернут якорь датчика. Тем самым нарушенное равновесие электродвижущих сил будет восстановлено, якоря двигателей вновь окажутся в совершенно одинаковом положении по отношению к магнитам, и установка опять готова к новой передаче угла поворота якоря.Схема установки таких указателей на плавучих доках для контроля степени открытия или закрытия задвижек клинкетов затопления (т. е. клапанов, служащих для поступления воды в балластные отсеки дока) показана на рис. 5. 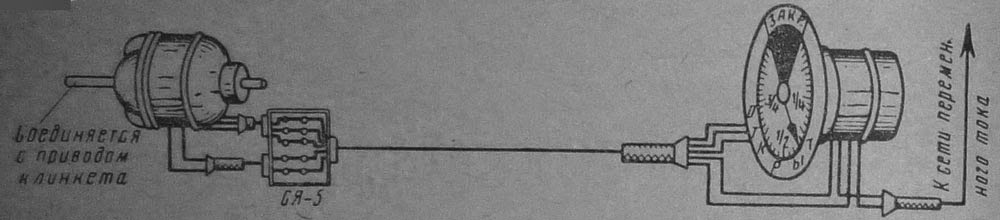 Рис.5. Принцип синхронной передачи указателей на плавучих доках для контроля степени открытия или закрытия задвижек клинкетов затопления Датчиком и приемником здесь служат индукционные электродвигатели, так называемые сельсин-машины (сельсины). Датчик связан механически с приводом клинкета, а приемник снабжен соответствующей шкалой и стрелкой. Когда клинкет открывается или закрывается, якорь датчика, связанный с ним механически, поворачивается на определенный угол. Это ведет, к появлению уравнительного тока в цепи связанных между собой электрических якорей датчика и приемника. Под влиянием взаимодействия этого тока с магнитным полем приемника якорь последнего повернется на такой же угол, как и якорь датчика. На такой же угол отклонится и стрелка, укрепленная на конце вала якоря приемника. Таким образом видна будет степень открытия клинкета.Список литературы Роджеро Н.И. Справочник судового электромеханика и электрика 2-е изд., перераб. и доп. – М.: Транспорт, 1986 г. – 319 стр., ил., табл. Эксплуатация электроэнергетических систем морских судов: Справочник / О. П. Хайдуков, А. Н. Дмитриев, Г. Н. Запорожцев. — М.: Транспорт, 1988 г. — 223 с.: ил., табл. — Библиогр. : с. 211 С.В. Камкин; И.В. Возницкий; В.П. Шмелев - Эксплуатация судовых дизелей / Транспорт / 1990 г. / 5-277-01002-5 Пипченко А.Н., Пономаренко ‘В.В., Теплов Ю.И., Романенко А.В. “Электрооборудование, электронная аппаратура и системы управления (учебное пособие в Правилах Регистра и технической эксплуатации) к разделам А-Ш/1, А-Ш/2 8ТС\Л/-ССЮЕ 78/95”. Учебное пособие. Одесса: ЦПАП,-1998 г.- 295 стр. И.В. Возницкий - Вяртсиля. Среднеоборотные двигатели модельного ряда L20-LV32 / Моркнига / 2008 г. |