Проект по модулю
 Скачать 1.27 Mb. Скачать 1.27 Mb.
|

Механизм горизонтального перемещения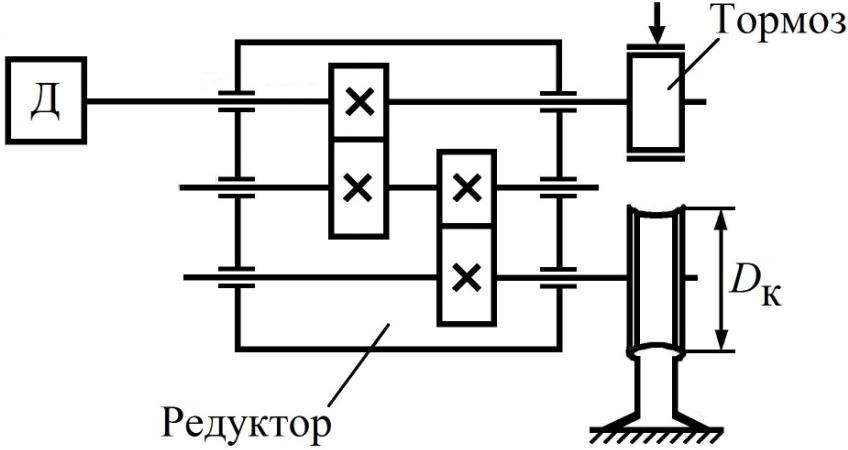 Упрощенная кинематическая схема механизма приведена на рис. 3. Упрощенная кинематическая схема механизма приведена на рис. 3.Рис. 3. Кинематическая схема электропривода горизонтального перемещения крана-штабелера Требования к электроприводуРежим работы – повторно-кратковременный. Диапазон регулирования скорости (при отсутствии контура положе- ния) – до 40:1 (в зависимости от требуемой точности позиционирования). Необходимость точного позиционирования механизма в фиксирован- ных точках. Необходимость ограничения значения ускорения (замедления) с целью предотвращения пробуксовки. Возможность осуществления реверса. Расчетные выраженияПриведенный к валу двигателя статический момент, Нм, [5, 6] G dЦ KP KP Gμ 2 f M , C iη (22) M где Кp = 3,0 – коэффициент, учитывающий трение реборд ходового колеса о рельсы; Gкр – общий вес незагруженного крана, Н; G– вес груза, Н; – коэффициент трения в подшипниках ходовых колес, = 0,015 для подшипников качения; dц – диаметр цапфы ходового колеса, м; f = 0,0005 – коэффициент трения качения ходовых колес, м;i– передаточное число редуктора; м = 0,7 – коэффициент полезного действия передач механизма. Gкр = g mкр, где g= 9,81 – ускорение свободного падения, м/с2; mкр – масса незагруженного крана, кг. G= g∙m, где m– масса груза, кг; Статическая мощность на валу электродвигателя горизонтального перемещения, Вт: K G Gμd 2 fV C C N P P KP Ц Г M ω , DηM (23) где VГ – максимальная скорость передвижения крана-штабелера, м/с; N– номинальная скорость двигателя, рад/с. Приведенный к валу двигателя момент инерции механизма, кг·м2. Jмех mV2 Г m ω KP 2 N m mρ2 , (24) KP где ρ VГ ω N – радиус приведения. Суммарный момент инерции электропривода J = 1,2∙Jдв + Jмех, (25) где Jдв – момент инерции двигателя, кг∙м2. Значение пониженной скорости определяется по (12). |