Проект по модулю
 Скачать 1.27 Mb. Скачать 1.27 Mb.
|

Варианты электроприводаВозможны два варианта: электропривод с двигателем постоянного тока с независимым возбуждением; электропривод с асинхронным короткозамкнутым двигателем. Механизм вертикального перемещения (механизм подъема)Упрощенная кинематическая схема механизма приведена на рис. 4. 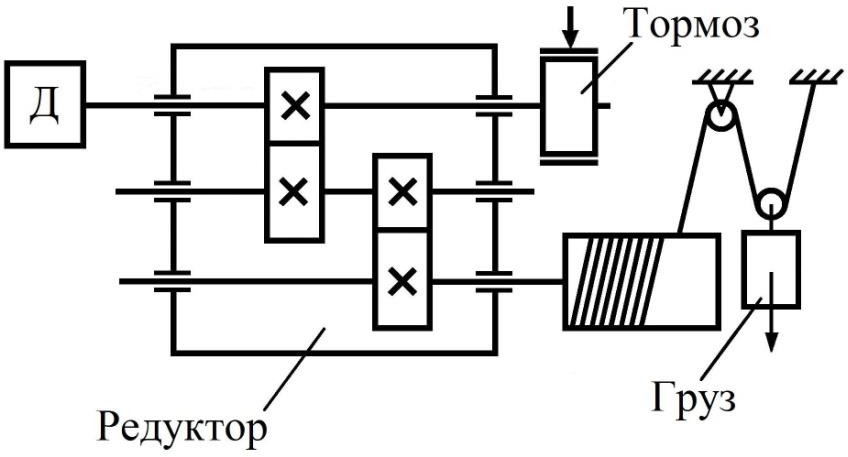 Рис. 4. Кинематическая схема электропривода вертикального перемещения крана-штабелера Требования к электроприводуЭлектропривод работает в повторно-кратковременном режиме. Диапазон регулирования скорости – до 10:1 (в зависимости от требуемой точности останова). Необходимость точного позиционирования электропривода в фиксированных точках. Должна быть обеспечена возможность работы и регулирования скорости электропривода при активном моменте статической нагрузки. Привод должен быть реверсивным. Расчетные выраженияПриведенный к валу двигателя статический момент при подъеме груза, Н·м, G GD M ГP Б , C 2iη m (26) MEX П где Gгр – вес грузоподъемного устройства, Н; G– вес груза, Н; DБ – диаметр барабана, м; mп – кратность полиспаста, mп = 2; i– передаточное число редуктора; мех – коэффициент полезного действия подъемного механизма, мех = 0,7. Gгр = gmгр, где g= 9,81 – ускорение свободного падения, м/с2; mгр – масса грузоподъемного устройства, кг. G= g∙m, где m– масса груза, кг; Статическая мощность на валу электродвигателя при подъеме груза, Вт: G GV η P KP П M ω , (27) C CП N MEX где Vп – максимальная скорость подъема, м/с. Приведенный к валу двигателя момент инерции механизма подъема, кг·м2, JМЕХ mГP mV2 П ω 2 . N (28) Суммарный момент инерции электропривода определяется по (25). Значение пониженной скорости, необходимое для обеспечения точного позиционирования механизма подъема, а также для перемещения механизма подъема по условиям работы грузозахватного устройства, определяется по (12). Если перемещение механизма подъема по условиям работы грузозахватного устройства реализуется по треугольной тахограмме, то значение максимальной скорости (Vт) в этом случае определяется следующим образом:  VT , VT ,где Vт – максимальная скорость треугольной тахограммы, м/с; l– отрезок пути, проходимый механизмом подъема по условиям нормальной работы грузозахватного устройства, м. |