Проект по модулю
 Скачать 1.27 Mb. Скачать 1.27 Mb.
|

ТИПОВЫЕ ЗАДАНИЯ НА ПРОЕКТИРОВАНИЕМеханизмы крана-штабелераКраном-штабелером называется подъемно-транспортная машина циклического действия, предназначенная для обслуживания складов. Кран- штабелер передвигается по рельсам вдоль прохода, по обе стороны которого расположены стеллажи, состоящие из горизонтальных и вертикальных рядов ячеек, в которых на опорах располагаются контейнеры, тарные ящики или поддоны с деталями (грузом). Краны-штабелеры оборудованы вертикальной колонной, по которой перемещается грузовой захват или специальная платформа [4]. Краны-штабелеры имеют три механизма с электрическим приводом. Механизм горизонтального перемещения штабелера по напольному рельсу в проходе между стеллажами. Максимальный путь перемещения этого механизма определяется количеством рядов ячеек, расположенных по длине. Механизм вертикального перемещения (механизм подъема и опускания грузоподъемника). Максимальный путь перемещения этого механизма определяется количеством рядов (этажей) ячеек, расположенных по высоте. Механизм передвижения грузового телескопического захвата. Установка грузов в стеллажи производится следующим образом: с приемной площадки путем выдвижения телескопического грузового захвата груз забирается и устанавливается на грузовой платформе. После этого механизмы горизонтального перемещения и подъема производят установку грузовой платформы напротив заданной ячейки стеллажа. Причем вилы грузового захвата при установке груза в пустую ячейку, находятся на 30–50 мм выше ячейки. Затем производится выдвижение грузового захвата внутрь стеллажа и опускание его на 10–20 мм ниже уровня ячейки. При этом груз остается лежать на опорной плоскости стеллажной ячейки, грузовой захват убирается внутрь крана-штабелера, который возвращается в исходное положение. Доставка груза со склада производится аналогично описанному выше, только в обратной последовательности. Таким образом, как следует из технологических требований, необходимо обеспечить позиционирование механизмов горизонтального и вертикального перемещения с высокой точностью – 2–5 мм. Для обеспечения указанной точности необходимо создавать позиционные электроприводы, управление которыми производится в функции знака и модуля рассогласования между заданным и истинным положением управляемого механизма. В этом случае можно обеспечить требуемую точность позиционирования без использования режима пониженной скорости. При отсутствии контура положения (как это предполагается при выпол- нении курсового проекта) отрезок пути 40–60 мм перед точной остановкой механизм должен пройти на пониженной скорости, что позволит обеспечить требуемую точность позиционирования. Таким образом, тахограмма механизма горизонтального перемещения соответствует показанной на рис. 1, но участок работы с пониженной скоростью VПОН может отсутствовать. Кроме того, по условиям работы грузозахватывающего устройства (при транспортировании грузов на стеллаж и при их извлечении со стеллажа) должно быть обеспечено перемещение механизма вертикального перемещения после основного перемещения крана-штабелера в обратном направлении на 30–50 мм в режиме пониженной скорости или по треугольной тахограмме (фрагмент цикла с такими участками показан на рис. 2). Участок работы с пониженной скоростью VПОН может и отсутствовать. 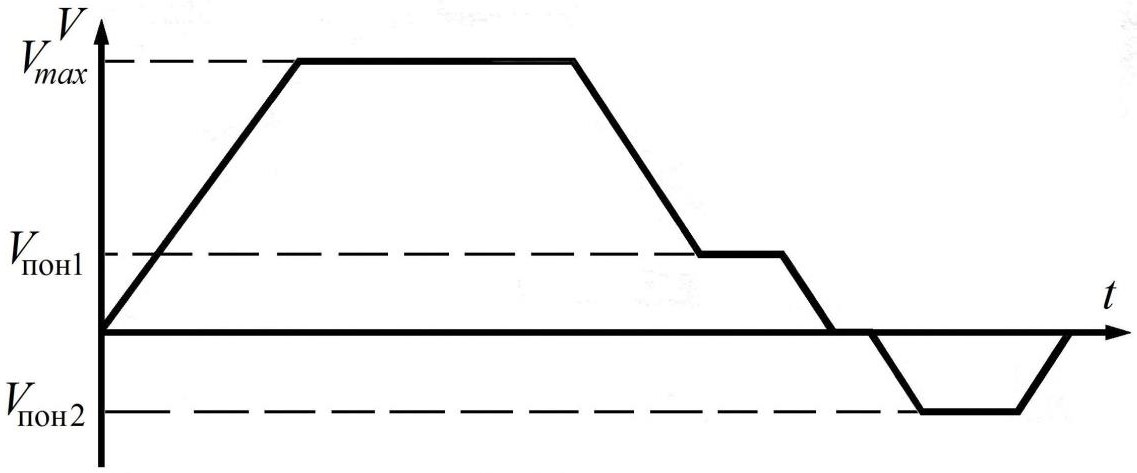 Рис. 2. Тахограмма электропривода крана-штабелера |