диплом саши. Реферат Ключевые слова биометрия, аутентификация, отпечаток пальца, преобразование Габора
 Скачать 3.72 Mb. Скачать 3.72 Mb.
|

|
2.2 Исследование алгоритмов обработки образов отпечатков пальца 2.2.1 Алгоритмы обработки образов, основанные на сглаживающих или медианных фильтрах Одни из наиболее часто используемых фильтров, используемых для обработки образов отпечатка пальца. Широкое распространение получили благодаря простоте реализации и низких требований к ресурсам вычислительной системы. Однако данные фильтры обеспечивают крайне невысокую степень фильтрации, к тому же побочным результатом их использования является размытие изображения, что отрицательно влияет на последующие шаги алгоритма распознавания образа. 2.2.2 Метод пространственной фильтрации образа, заключающейся в реализации физического процесса поглощения и отражения света Плюсами данного метода является простота его реализации и достаточно высокое быстродействие; несмотря на простоту, конечное изображение не имеет характерной расфокусировки, свойственной широко распространенным сглаживающим и медианным алгоритмам. Так же данный алгоритм обеспечивает выделение середин папиллярных линий, что упрощает дальнейшую обработку отпечатка и выделение его скелета, что упрощает последующие шаги алгоритма распознавания образа отпечатка пальца. Минусами данного метода является худшее, по сравнению с более сложными фильтрами, качество фильтрации и сохранения ключевой информации. 2.2.3 Алгоритм обработки образов основанный на фильтрах Габора Преимуществом данного метода является самое высокое качество обработки образов ОП из применяемых на сегодняшний день фильтров. Недостатком – самые высокие требования к вычислительной мощности из всех представленных алгоритмов. Так как перед нами стоит задача выбрать алгоритм из условия качества фильтрации и сохранения ключевой информации, то наиболее рациональным выбором является алгоритм, основанный на фильтрах Габора, так как он лучше других удовлетворяет данным критериям. 2.3 Преобразование Габора Рассмотри фильтр Габора в контексте нашей задач, а именно двумерный фильтр Габора. 2.3.1 Пространственный фильтра Габора для 2-D изображений Формула функции Габора выглядит следующим образом: где 2.3.2 Комплексная синусоида Комплексная синусоида определяется как где Можно представить синусоиду как две действительные функции, расположенные в действительной и мнимой части комплексной функции (Рисунок 2.1). 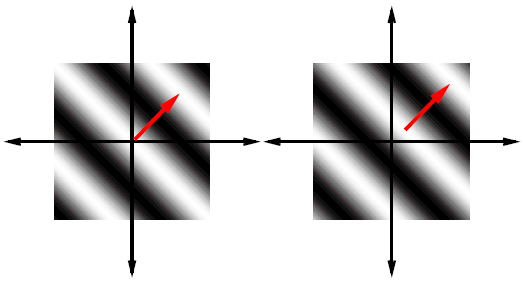 Рис. 2.1. Действительная и мнимая часть комплексной синусоиды с параметрами: Действительная и мнимая части синусоиды имеют вид:  Параметры 2.3.3 Огибающая Гаусса Огибающая Гаусса имеет вид: где  . .Иллюстрация огибающей Гаусса представлена на рисунке 2.2. 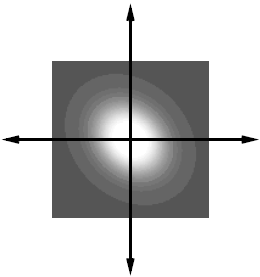 Рис.2.2. Огибающая Гаусса при значениях параметров: 2.3.4 Комплексная функция Габора Комплексная функция Габора определяется следующими 9 параметрами: • K Весовая величина огибающей Гаусса • (a,b) Весовые величины огибающей, распределенные по осям • • • • Р Фаза комплексной синусоиды Каждая комплексная функция Габора состоит из двух частей, расположенных в действительной и мнимой части функции (Рисунок 2.3). 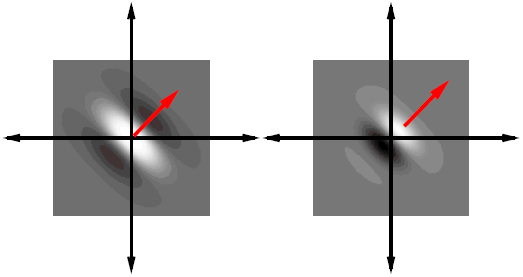 Рис.2.3 Действительная и мнимая часть комплексной функции Габора. Таким образом, функция Габора имеет вид: 2.3.5 Алгоритм построения двумерного фильтра Габора Для построения двумерного фильтра Габора применяется формула  где На Рисунке 2.4 изображена визуализация двумерной функции Габора в пространстве. 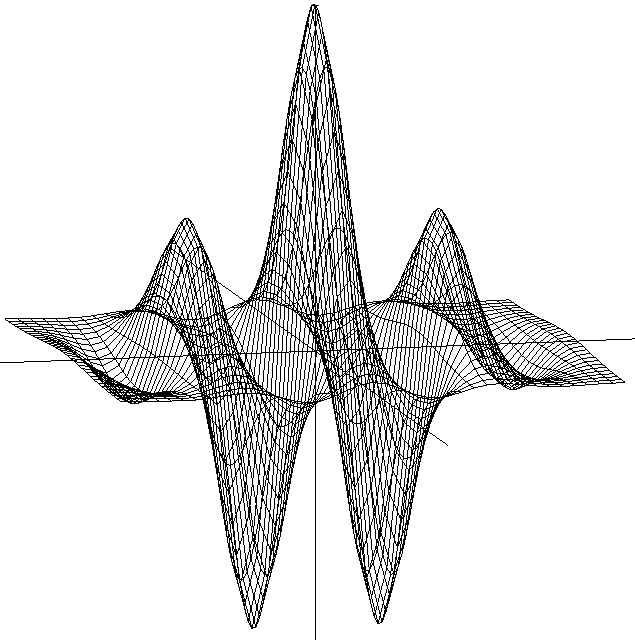 Рис.2.4. Двумерная функция Габора. 2.4 Применение фильтра Габора для 2-D изображений Применение фильтра Габора для изображений осуществляется за четыре этапа. Этап 1. Нормализация изображения. Нормализация изображения необходима для того, чтобы задать предварительные средние значения и отклонения. Нормализованное изображение G определяется как  , ,где На рисунке 2.5 приведен пример входного и нормализованного изображения  (а) (б) Рис.2.5. Пример входного (а) и нормализованного (б) изображения образа отпечатка пальца. Этап 2. Расчет ориентационного изображения. Рассчитываем рассчитывается ориентационное изображение. Ориентационное изображение О представляет собой матрицу  . .Пример ориентационного изображения отпечатка пальца показан на Рисунке 2.6. 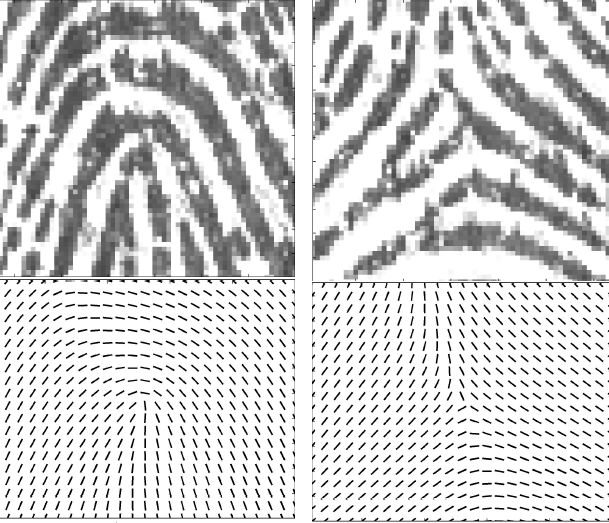 а) б) Рис.2.6. Ориентационные изображения фрагментов отпечатка пальца. На рисунке а) изображен фрагмент центра, на рисунке б) фрагмент дельты. Этап 3. Расчет частотного изображения. Частотное изображение представляет собой матрицу размера  Рис.2.7. Пример блоков, в которых невозможно четко определить четкую синусоидально-очерченую волну.  Рис.2.8. Волновое представление линий в ячейке Расчет частоты в точке с координатой Этап 4. Бинаризация изображения. Изображение B определяется как изображение, если каждый пиксель принимает одно из двух возможных значений – нуля единицы. Единица соответствует гребню отпечатка, ноль – впадине:  , ,где Этап 5. Применение к бинарному изображению фильтров Габора. Фильтр настраивается на локальную ориентацию выступов, применяется к пикселям выступов и впадин изображения.  где Для использования Фильтра Габора нам необходимо знать значения следующих величин: 1) направление фильтра 2) частоту синусоидальной плоскостной волны 3) Частотная характеристика фильтра определяется из локальной частоты f выступов, направление определяется локальной ориентацией. Значения 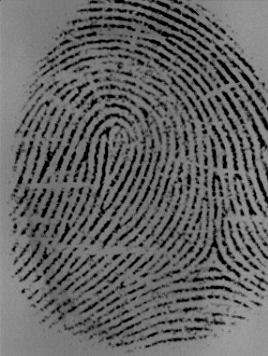 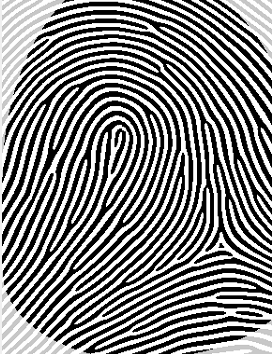 Рис.2.9. Пример отпечатка пальца, обработанного фильтром Габора. 2.5 ROC-анализ Пусть имеется два класса: с положительным исходом и с отрицательным исходом. ROC-кривая показывает зависимость количества верно классифицированных положительных примеров от количества неверно классифицированных отрицательных примеров. В терминологии ROC-анализа первые называются истинно положительным, вторые – ложно отрицательным множеством. При этом предполагается, что у классификатора имеется некоторый параметр, варьируя который, мы будем получать то или иное разбиение на два класса. Этот параметр часто называют порогом, или точкой отсечения (cut-off value). В зависимости от него будут получаться различные величины ошибок I и II рода. Для понимания сути ошибок I и II рода рассмотрим Таблицу 2.1. Таблица 2.1 Ошибки первого и второго рода
TP (True Positives) – верно классифицированные положительные примеры (так называемые истинно положительные случаи); TN (True Negatives) – верно классифицированные отрицательные примеры (истинно отрицательные случаи); FN (False Negatives) – положительные примеры, классифицированные как отрицательные (ошибка I рода). Это так называемый "ложный пропуск" – когда интересующее нас событие ошибочно не обнаруживается (ложно отрицательные примеры); FP (False Positives) – отрицательные примеры, классифицированные как положительные (ошибка II рода); Это ложное обнаружение, т.к. при отсутствии события ошибочно выносится решение о его присутствии (ложно положительные случаи). Для нашей задачи положительным исходом будет класс гребней (черные пиксели в для изображения), отрицательным исходом – класс впадин (белые пиксели). При анализе чаще оперируют не абсолютными показателями, а относительными – долями, выраженными в процентах: Доля истинно положительных примеров: Доля ложно положительных примеров: Введем еще два определения: чувствительность и специфичность модели. Ими определяется объективная ценность любого бинарного классификатора. Чувствительность – это и есть доля истинно положительных случаев: Специфичность – доля истинно отрицательных случаев, которые были правильно идентифицированы моделью: Заметим, что Модель с высокой чувствительностью часто дает истинный результат при наличии положительного исхода (обнаруживает положительные примеры). Наоборот, модель с высокой специфичностью чаще дает истинный результат при наличии отрицательного исхода (обнаруживает отрицательные примеры). Если рассуждать в терминах нашей задачи:
ROC-кривая получается следующим образом: 1. Для каждого значения порога отсечения, которое меняется от 0 до 1 с шагом dx (например, 0.01) рассчитываются значения чувствительности Se и специфичности Sp. В качестве альтернативы порогом может являться каждое последующее значение примера в выборке. 2. Строится график зависимости: по оси у откладывается чувствительность Se, по оси х откладываем величину 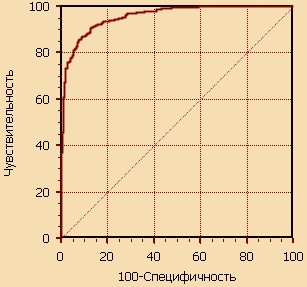 Рис 2.10. ROC-кривая Для идеального классификатора график ROC-кривой проходит через верхний левый угол, где доля истинно положительных случаев составляет 100% или 1.0 (идеальная чувствительность), а доля ложно положительных примеров равна нулю. Поэтому чем ближе кривая к верхнему левому углу, тем выше предсказательная способность модели. Наоборот, чем меньше изгиб кривой и чем ближе она расположена к диагональной прямой, тем менее эффективна модель. Диагональная линия соответствует "бесполезному" классификатору, т.е. полной неразличимости двух классов. 2.6 Подбор параметров алгоритма. Математическая постановка задачи | ||||||||||||