мостовой кран. Регулируемый электропривод
 Скачать 2.77 Mb. Скачать 2.77 Mb.
|

Исследование частотно-регулируемого асинхронного электропривода мостового крана с векторным управлениемПрограмма исследований электроприводаРабота электропривода крана исследуется в режиме: Плавный пуск – разгон до частоты 10Гц – выход(разгон) на максимальную скорость – снижение часто ты до 10Гц - торможение и останов. Модели частотно-регулируемого асинхронного электропривода крана с векторным управлением Рассматривается модель частотно-регулируемого асинхронного электропривода крана при векторном управлении: с импульсным датчиком скорости. Библиотека моделей частотно-регулируемого асинхронного электропривода крана с векторным управлением Model2.mdl – модели асинхронного электропривода крана с частотным векторным управлением на базе модели электрической части силового канала системы преобразователь частоты – асинхронный электродвигатель из пакета Simulink системы MATLAB, с датчиками токов i1a, i1b, без датчиков потока и с импульсным датчиком скорости вращения двигателя. Схемы набора имитационных моделей частотно-регулируемого асинхронного электропривода крана при векторном управлении приведены в приложении 2. Исходные параметры настройки САР РЭПЭквивалентные индуктивности обмоток: статора L L L 6,95104 0,01821 0,018905 Гн; 1 1 m ротора 2 2σ L L' Lm 9,354 104 0,01821 0,0191454 Гн. Коэффициент рассеяния магнитного потока: 1 2  L m L1 L2 2  0,010821 1 0,083824 0,018905 0,0191454 Эквивалентное сопротивление цепи статора: L2 0,018212  R1э R1 R2 m 0,054 0,031 0,082045 Ом. 2 L2 0,01914542 Электромагнитные постоянные времени статора и ротора: T σ L1 0,083824 0,018905 0,019315 с. R 1э 1э 0,082045  2 L2 R2 0,0191454 0,6176 с.  0,031 0,031Период ШИМ: Тшим 1 fшим 1 5 103 2 104 с. Напряжение звена постоянного тока преобразователя: Ud0 U1фн 23220 567, 25 В,    γмакс 0,95 γмакс 0,95где: макс 0,95 – максимальное значение коэффициента относительной продолжительности включения ключей инвертора. Линейное напряжение источника питания преобразователя:  Ud0 Ud0 567, 25 420,185 В.  с 1,35 1,35 Максимальное значение коэффициента усиления преобразователя: и  k Ud0 k Ud0 567, 25 327,502  . .Значение номинального потокосцепления двигателя  2н I0 Lm 2н I0 Lm2 37,042 0,01821 0,954 Вб. Значение номинального тока I1d:  I1dн I0 I1dн I0 2 37,042 52,385 А, Эквивалентный момент нагрузки, приведенный к валу двигателя: Mэп.макс 1,7Mдв.н Mс дв 1,7 709,721 0,697 1218 Н× м. Значение максимального тока I1q: I Mэп.макс  1419  260,61 А, 260,61 А,1q.макс 3 Lm z 3 0,01821 2 0,954 2 L2 р 2н 2 0,0191454 Модуль вектора тока статора:   mod I I2 I2 mod I I2 I2 265,823 А. 1макс 1qмакс 1dн Максимальный ток электропривода: I  mod I1макс mod I1макс эп.макс 265,823 187,965 А.  Условие УсловиеIэп.макс Iи.макс выполняется: 187,965 250,5 A Принимаем в дальнейших расчетах Iэп.макс 200 A . Параметры настройки контура тока с ПИ-регулятором и аналоговым датчиком Принимаем разрядность АЦП датчика тока преобразователя: nацп. дт = 12. Принимаем максимальное значение измеряемого тока (амплитудное значение переменного тока): 2 Iэп.макс 1,4 2 200 400 А, коэффициент, учитывающий возможное увеличение тока за счет перерегулирования. Коэффициент передачи датчика тока: kдт 0,5 2nацп.дт  Iизм.макс Iизм.макс 0,5 212  400 400 4,827 1 / А. Принимаем Nот.макс 1. Коэффициент обратной связи по току: kт 1 Iизм.макс 1 400 0,002357 1 / А. Коэффициент согласования сигналов обратной связи и задания на входе контура тока: kос.т 1  0,5 2nацп.дт 0,5 2nацп.дт 1  0,5 212 0,5 212 1  2048 2048 4,883104 . Максимальное значение задания на входе контура тока, соответствующее  максимальному действующему значению тока электропривода максимальному действующему значению тока электроприводаIэп.макс:  N 2 Iэп.макс k N 2 Iэп.макс k2 I 2 200 0,667 зт.макс Iизм.макс т эп.макс 400 . Принимаем: 4 Т Т Т Т 2 10 с, ос.т пк.т зу.и шим где: Тос.т интервал квантования сигналов в цепи обратной связи контура тока; Тпк.т интервал квантования управления в прямом канале контура тока; Тзу.и интервал времени задержки подачи управления от регулятора тока к ключам инвертора. Принимаем постоянную времени аналогового фильтра в цепи измерения тока Тф.от = 0. Принимаем коэффициент аппроксимации звена чистого запаздывания апериодическим звеном: nт 2 . Эквивалентная малая постоянная времени оптимизированного контура тока Т Тос.т n тэ т 4  2 10 4 Тзу.и Тф.от 2 2 10 0 3104 с. Принимаем коэффициент типовой настройки контура тока на модульный оптимум (МО): ат 2 . Постоянная времени регулятора тока: Tрт Т1э 0,019315 с. Коэффициент усиления регулятора тока: k Т1э R1э  0,019315 0,082045  3, 421 3, 421рт k k aТ 327,502 0,02357 2 3104 и т т тэ . т т μ тэ Т aТ 2 3104 6 104 с. Допустимое значение выходного сигнала регулятора тока Nртdдоп 1 Допустимое значение выходного сигнала регулятора тока I1d:  I1q : I1q : Nртqдоп Nртqдоп 0 Параметры контура потокосцепления с ПИ-регулятором без датчика Разрядность АЦП датчика потока nацп. д = 12. Максимальное значение измеряемого потока 2изм.макс σ 2н 1,048 0,954 1 Вб , где σ 1,048 – коэффициент, учитывающий возможное увеличение потокосцепления за счет перерегулирования. Коэффициент передачи датчика потока: kд 0,5 2nацп.д 2изм.макс 0,5 212 1 2048 1 / Вб. Принимаем: Nо.макс 1. Коэффициент обратной связи по потоку: k 1  2изм.макс 2изм.макс 1 11 / Вб.  1 1Коэффициент согласования сигналов обратной связи и задания на входе контура потокосцепления: kос. 1  0,5 2nацп.д 0,5 2nацп.д 1 0,5 212 4,883104 Коэффициент согласования сигналов обратной связи и задания на входе контура потокосцепления: N 2н k 0,954 0,954  з макс 2изм.макс 2н 1 Интервалы квантования сигналов в цепи обратной связи контура потока: Тос. Тпк. 10 Tшим 10 2 104 2 103 с. Принимаем постоянную времени аналогового фильтра в цепи измерения потока Тф.о = 0. Принимаем коэффициент аппроксимации звена чистого запаздывания апериодическим звеном: n 1. Эквивалентная малая постоянная времени оптимизированного контура потокосцепления: Т Т 4 2 103 Тэ Tт ос. n Тф.о Tт ос. n Тф.о 6 10 0,0026 с.  1 1Принимаем коэффициент типовой настройки контура потокосцепления на модульный оптимум (МО): а 2 . Постоянная времени регулятора: Тр T2 0,6176 с. Коэффициент усиления регулятора:  k Т2 kт k Т2 kт 0,6176 0,02357 15,373 р L k aТ  0,018211 2 0,0026 m э Допустимое значение выходного сигнала регулятора потока: Nр доп Nзт. макс 0,667 Параметры контура скорости с ПИ-регулятором с импульсным датчиком скорости Максимальное значение измеряемой скорости: ωизм.макс σс ωэп.макс 1,29 77,456 100 рад / c, где σс коэффициент, учитывающий возможное увеличение скорости за счет перерегулирования. Принимаем Nос.макс 1. Коэффициент обратной связи по скорости: k k 1 1 0,01 с / рад. с ос.с ωизм.макс 100 Значение максимального задания на входе контура скорости: N ωэп.макс 77, 456 0,775 зс.макс ωизм.макс 100 Интервалы квантования сигналов в цепи обратной связи контура скорости: Т Т 10 T 10 2 104 2 103 с. ос.с пк.с шим Принимаем постоянную времени аналогового фильтра в цепи измерения скорости Тф.ос 0 . Коэффициент аппроксимации звена чистого запаздывания апериодическим звеном: nс 2. Эквивалентная малая постоянная времени оптимизированного контура скорости: n сэ т ф.ос T T Tос.с T 6 104 с 2 103 0 0,0016 с. 2 Принимаем коэффициенты типовой настройки контура скорости на симметричный оптимум (СО) : bc ac 2 . Постоянная времени регулятора: Трс bc acТсэ 2 2 0,0016 0,0064 с. Коэффициент усиления регулятора: k Jэ kт  3,521 0,02357  47,639 47,639рс 3 Lm z k a Т 0,954 3 0,01821 4 0,01 2 0,0016 2н 2 L2 р с c μсэ 2 0,0191454 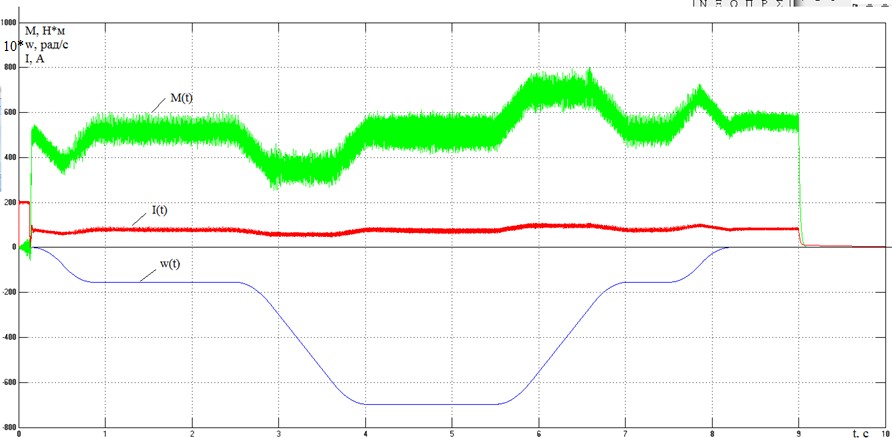 Рисунок 36 – Переходные процессы в электроприводе с векторным управлением при спуске краном груза массой 15 т. 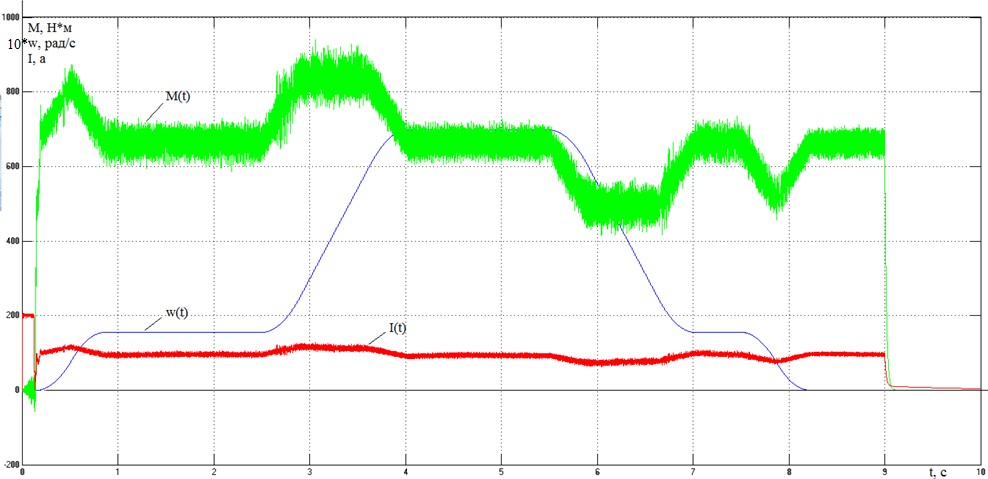 Рисунок 37– Переходные процессы в электроприводе с векторным управлением при подъеме краном груза массой 15 т. 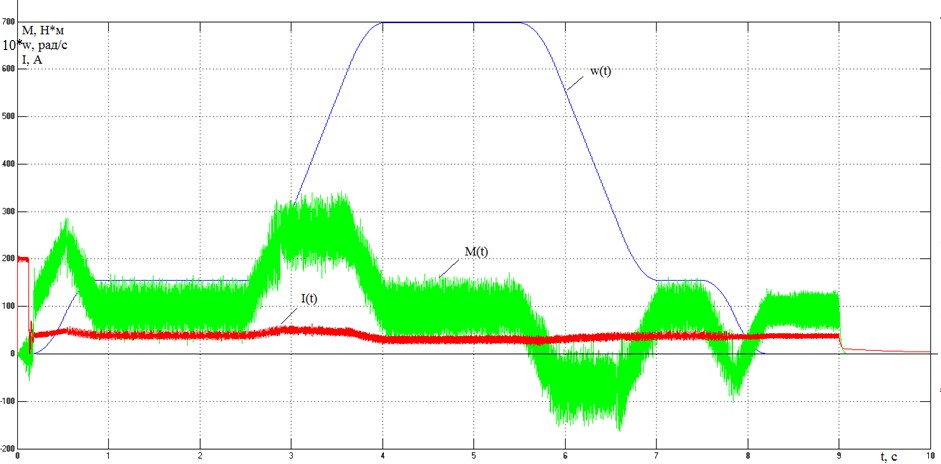 Рисунок 38– Переходные процессы в электроприводе с векторным управлением при подъеме краном пустого крюка 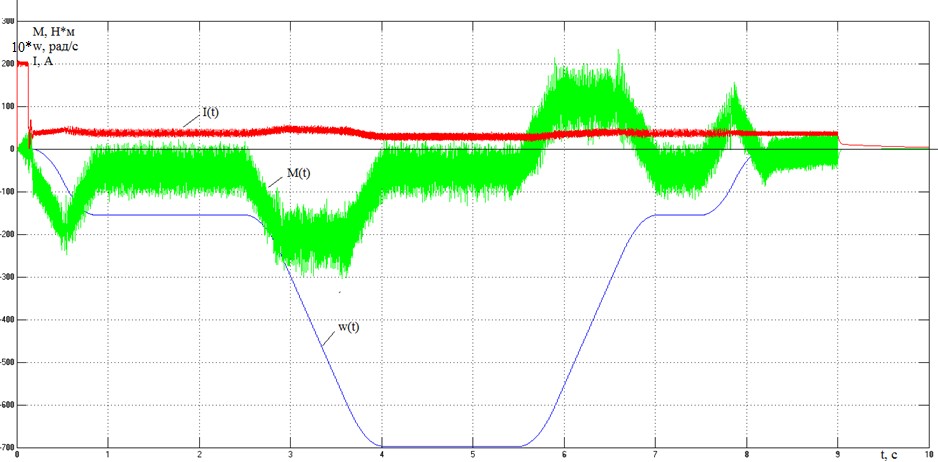 Рисунок 39– Переходные процессы в электроприводе с векторным управлением при спуске краном пустого крюка Вывoд к разделу: Преимущества векторного метода управления асинхронным двигателем: Высокий уровень точности при регулировании скорости вращения вала, несмотря даже на возможное отсутствие датчика скорости; Осуществление вращения двигателя на малых частотах происходит без рывков, плавно; Установлен датчик скорости, с помощью его достигли номинального значения момента на валу даже при нулевом значении скорости; Быстрое реагирование на возможное изменение нагрузки – резкие скачки нагрузки практически не отражаются на скорости электропривода; Высокий уровень КПД двигателя, за счет сниженных потерь из-за намагничивания и нагрева. Несмотря на очевидные преимущества, метод векторного управления имеет и определенные недостатки – большая сложность вычислений, для работы необходимо знание параметров двигателя. Помимо всего прочего колебания значения скорости при постоянной нагрузке значительно больше, нежели при скалярном методе управления. Кстати, существуют такие сферы, где используются электроприводы исключительно со скалярным методом управления. К примеру, групповой электропривод, в котором один преобразователь подпитывает несколько двигателей. На рисунках 36-39 можно заметить значительные изменения, пульсации тока, момента заметно уменьшились, а переходный процесс скорости происходит без колебаний и скачков как с максимальным грузом, так и без него.По этому в связи с такими выводами, можно сказать, что векторное управление для электропривода мостового крана удовлетворяет всеми условиями технического задания. |