СРО-12. Решение задач динамики мкэ 2 2 Приближенные методы в динамике сооружений 4
 Скачать 0.6 Mb. Скачать 0.6 Mb.
|

Приближенные методы в динамике сооруженийКак установили в гл. 3, расчет колебательных систем можно вести по уравнениям ко- лебаний в формах метода перемещений и метода сил:
где ai-формы колебаний, zi-нормальные координаты. Такой подход связан со сложной задачей определения полного спектра частот и форм собственных колебаний системы со мно- гими динамическими степенями свободы из вековых уравнений высоких порядков
Однако во многих случаях определение всех частот и форм собственных колебаний из этих уравнений является из лишним, т. к. в практических расчетах часто используется лишь низший спектр собственных частот и соответствующие им формы колебаний. При вычислении ограниченного числа частот и форм собственных колебаний широко применяются приближенные методы. Рассмотрим некоторые из них. Метод приведенных массВ предыдущей главе 3.7 мы убедились, что даже расчет такой простейшей балки как системы с распределенной массой приводит к дифференциальному уравнению, имеющему бесчисленное число решений. Если же динамическая система будет состоять из большого числа элементов, то ее расчет приведет к системе из множества дифференциальных уравнений в частных производных с многочисленными граничными условиями, решение которой стано- вится весьма сложной или даже неразрешимой задачей. Упрощение решения достигается сосредоточением масс в дискретных точках. Такой метод называется методом приведенных масс. В нем величины приведенных масс находят из условия равенства кинетических энергий заданной и приведенной систем:
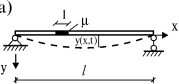
Как пример приведения массы распределенной системы к сосредоточенной массе рас- смотрим шарнирно-опертую балку с погонной массой μ(рис. 3.19 а).
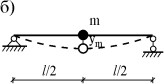
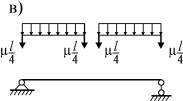
где y0(x) - форма колебаний. Тогда кинетическая энергия участка балки длиной dxбудет где 𝑦̇ - скорость движения. Определим полную кинетическую энергию колеблющейся балки с распределенной массой: 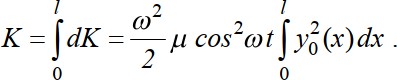 Из условия равенства К = Кпр получаем  удовлетворяющей граничным условиям закрепления балки. Подставив ее в выражение массы, получаем Так как податливость средней точки балки равна 𝛿 = 𝑙3  48𝐸𝐼 , то по известной формуле для частоты колебаний системы с одной степенью свободы (2.15) получаем  Если же взять форму колебаний в виде получим  Этот результат можно считать “точным”, т. к. принятая форма колебаний совпадает с первой формой собственных колебаний стержня (формула 3.98 при n=1). Если же принять приведенную массу как сумму реакций для двух половин балки, за- груженных распределенной массой μ(рис. 3.19 в), имеем  Получили решение достаточно близкое к точному. На основании этого, при использо- вании метода приведенных масс поступают так: стержневую систему делят на участки; массы участков делят пополам и сосредотачивают по их концам; соседние массы объединяют. |