Содержание учебной дисциплины Основы судовождения
 Скачать 1.99 Mb. Скачать 1.99 Mb.
|

|
| c = α + β |
– алгебраическая сумма значений углов α и β.
На путевой навигационной карте вначале прокладывается линия ПУα = ИК + α → линия, по которой следовало бы судно, если бы не было течения (рис. 5.20).
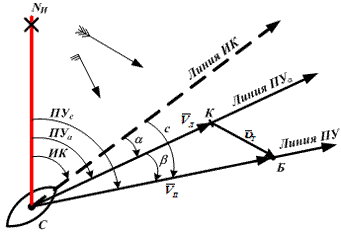
Рис. 5.20. Совместный учет дрейфа от ветра и течения
На линии ПУα откладывается вектор скорости судна по лагу в выбранном масштабе (отрезок ). Из конца вектора скорости судна (т. К) откладывается вектор скорости течения в том же масштабе (отрезок ). Соединив начальную точку начала учета α и β (т. С) с концом вектора течения (т. Б), получим линию пути. Отрезок укажет путевую скорость судна.
5. Сущность и основные формулы аналитического (письменного) счисления
Кроме графического счисления пути судна, учет его плавания может производиться с помощью аналитического (письменного) счисления.
Аналитическое счисление – вычисление географических координат судна по его курсу и плаванию (по сделанным судном разностям широт и долгот) по формулам вручную или с помощью счетно-решающих устройств.
Аналитическое счисление производится по формулам и применяется при плавании судна вдали от берегов на океанских переходах, когда ведение графического счисления становится неточным из-за больших погрешностей в графических построениях на морских навигационных картах мелкого масштаба.
Чаще всего аналитическое счисление применяется:
При непрерывной выработке текущих счислимых координат места судна, вводимых в системы судовой автоматики. Задача решается с помощью автоматических счетно-решающих устройств (или ЭВМ);
При периодическом вычислении счислимых координат места судна в тех случаях, когда необходимо исключить погрешности счисления за счет неточности графических построений, связанных с прокладкой пути судна на мелкомасштабной карте. Задача решается вручную или с помощью счетно-решающих устройств (для контроля точности графических построений на карте; определения места судна по разновременным наблюдениям светил).
Аналитическое счисление с помощью автоматических счетно-решающих устройств производится по формулам с учетом сжатия Земли. В простейших системах решаются формулы без учета сжатия Земли.
Получим основные формулы аналитического счисления (рис.5.21).
Судно из точки А (φ1 λ1), следуя постоянным курсом (К) по локсодромии, пришло в точку В (φ2 λ2).
Если будут известны сделанные судном разность широт (РШ) и разность долгот (РД) то координаты точки В (φ2 λ2) легко получить из соотношений:
| |
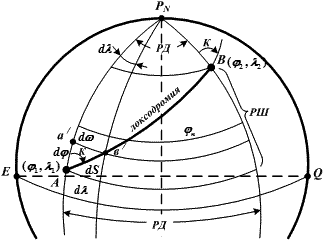
Рис. 5.21. Аналитическое (письменное) счисление пути судна
Значение разности широт (РШ) и разности долгот (РД) можно рассчитать по известным элементам движения: К → курсу судна и S → плаванию судна по этому курсу.
Считая Землю за сферу (шар) из элементарно малого треугольника Аа′в′:
Aa′ = dφ - приращение широты;
b′a′ = dω - приращение отшествия;
Ab′ = dS - приращение расстояния,
| где | dφ – разность широт (мили); |
| | dω – расстояние между меридианами по параллели от т. а′ до т. в′ – отшествие (мили); |
| | dS – плавание судна по локсодромии между точкой А и точкой в′ (мили). |
Если Δ Аа′в′ принять за плоский, можно написать дифференциальные уравнения:
| |
В результате интегрирования значений dφ и dω при K = const, получим:
-
1)→
то есть
| |
-
2)→
то есть
| ω = S · sin K |
Для вычисления значения разности долгот – РД, воспользуемся соотношением между длиной дуги экватора и параллели:
Умножим числитель (dω) и знаменатель (cos φ) на dφ, тогда

так как из Δ Аа′в′
то
Решение этого уравнения приводит к известному интегралу:
а
тогда
| РД = РМЧ · tgK |
Для вывода прямой связи между отшествием (ОТШ) и разностью долгот (РД), используем теорему о среднем значении интеграла, которая дает:
где φn – промежуточное значение широты в интервале между φ1 и φ2.
Тогда для разности долгот – РД можно написать
| |
Приравняв оба значения разности долгот (РД), получим значение промежуточной широты φn:
| |
откуда
| |
Подставив значение соs φn в формулу для разности долгот (РД) и учтя, что
| ОТШ = РШ · tgK, |
окончательно получим:
| |
где отшествие (ОТШ) и разность широт (РШ) в милях.
Таким образом отшествие (ОТШ) представляет собой длину параллели (в милях) между меридианами точек А и В, широта которой (параллели) определяется соотношением
| |
На практике, при ведении аналитического учета на коротких расстояниях, можно допустить, что в интервале от φ1 до φ2 значение cos φ изменяется линейно, тогда
| |
и приближенная формула для расчета разности долгот – РД примет вид:
| |
то есть разность долгот (РД) равна отшествию (ОТШ), деленному на косинус средней широты (φm).
6. Определение места судна
Как бы тщательно ни велось счисление пути судна, в нем неизбежно накапливается погрешность. Основными причинами погрешности счисления являются недостоверность знания и методов учета гидрометеорологических факторов влияющих на перемещение судна, инструментальные погрешности технических средств навигации и ряд других. Возможные погрешности в поправках компаса и лага, недостаточно точное знание элементов течения, трудности в учете дрейфа - все это приводит к отклонениям судна от заданного пути.
Величина погрешности счисления растет в определенной зависимости от времени плавания и в некоторый момент достигает такой величины, при которой не обеспечивается навигационная безопасность плавания. Это вызывает необходимость корректуры счисления. Корректура счисления должна быть выполнена таким способом, который не зависит от элементов счисления.
Таким способом корректуры счисления является получение координат судна с помощью внешних источников навигационной информации. При этом обеспечивается. получение информации о месте судна, точность которой в достаточной для обеспечения навигационной безопасности плавания степени превышает точность счислимого места и не зависит от элементов счисления
Навигационная информация необходимая для корректуры счисления судна представляет собой величину, зависящую известным образом от положения точки приема информации на земной поверхности.
Источниками навигационной информации являются специально созданные сооружения или устройства (навигационные знаки, радионавигационные системы, космические навигационные системы и т. п.) и естественные объекты (звезды, планеты, приметные горы и т. п.).
Процесс получения координат места судна по данным от внешних источников называется определением места судна или обсервацией.
В результате обсервации место судна может быть получено в виде географических координат (рассчитанных автоматически или вручную) или точки на карте, полученной в результате геометрических построений на карте. Такое место судна называется обсервованным, а полученные координаты - обсервованными. Они обозначаются (о, о).
Разработано большое количество способов определением места судна. Их можно разделить в зависимости от источников навигационной информации на несколько групп:
визуальные определения;
астрономические определения;
радиотехнические (радиолокационные, по радионавигационным системам, по космическим навигационным системам и др.)
Основой любого способа определения места судна является измерение каких-либо величин, которые зависят от местоположения судна на земной поверхности, т. е. являющихся функцией географических координат места судна.
Измеряемая величина, зависящая от места судна на земной поверхности, называется навигационным параметром.
Навигационные параметры могут измеряться непосредственно (пеленг, расстояние, угол) или определяться косвенно, например, по измерению параметров электромагнитного поля (амплитуда, фаза, разность фаз и т. п.).
Место судна на поверхности Земли определяется двумя координатами и . Чтобы найти два неизвестных и необходимо измерить как минимум два навигационных параметра.
Сущность определения места судна рассмотрим на примере определения места по трем пеленгам. С помощью пеленгатора, установленного на крыле мостика, в быстрой последовательности измеряют три пеленга на навигационные ориентиры (маяки). Записывают судовое время и отсчет лага на момент измерений. На карту наносят счислимую точку.
Направление на ориентир (пеленг) измеряется на судне с помощью визуальных и оптических пеленгаторов, визиров и радиолокационных станций.
С помощью всех этих приборов измеряются компасные пеленги (КП), так как все они сопряжены с судовым курсоуказателем (гирокомпас, гироазимут, магнитный компас и др.), которые имеют свои поправки (ΔГК, ΔГА, ΔМК и др.).
Поэтому, все измеренные с судна направления на ориентиры должны исправляться поправкой курсоуказателя (ΔК – общее обозначение поправки):
если курс на репитер пеленгатора поступает от магнитного компаса – ΔМК;
если курс на репитер пеленгатора поступает от гирокомпаса – ΔГК;
если курс на репитер пеленгатора поступает от гироазимута – ΔГА.
Чаще всего трансляция курса на его репитеры идет именно от гирокомпаса.
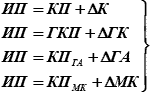 |
В результате исправления компасного направления поправкой того курсоуказателя, от которого идет трансляция курса на репитеры пеленгаторов, мы получаем значение исправленного или истинного направления (пеленга) с судна на ориентир (ИП).
На морской навигационной карте меркаторской проекции, измеренный компасный пеленг, исправленный поправкой курсоуказателя, прокладывается как прямая линия (изолиния пеленга – изопеленга – прямая линия) для небольших расстояний.
Исходя из того, что судно должно находиться на навигационной изолинии, соответствующей значению измеренного и исправленного навигационного параметра, то при наблюдении нескольких береговых ориентиров место судна будет находиться в точке пересечения истинных пеленгов на эти ориентиры.
Определение места судна по пеленгам на три ориентира
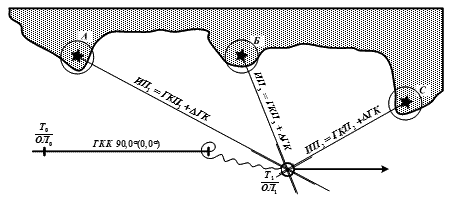
Рис. 5.22. Определение места судна по пеленгам на три ориентира
Для определения места судна по пеленгам на три ориентира необходимо (рис.5.22):
выбрать на берегу три видимых навигационных ориентира (А, Б, С), направления, на которые отличаются друг от друга на угол не < 30°;
Проверить, нанесены ли эти ориентиры на навигационную карту;
в быстрой последовательности измерить направления (КПА, КПС, КПБ) на эти ориентиры, заметить и записать время (Т1) измерения и отсчет лага (ОЛ1);
Рассчитать значения истинных пеленгов на эти ориентиры, для чего измеренные пеленги (КПА,Б,С) исправить поправкой курсоуказателя (ΔК).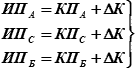
Исправленные (истинные: ИПА, ИПС, ИПБ) пеленги проложить на навигационной карте таким образом, чтобы они (линии пеленгов) прошли через ориентиры (ИПА – через место ориентира А; ИПС – через место ориентира С; ИПБ – через место ориентира Б). Фактически через места ориентиров проводятся не значения ИПА,Б,С, а ОИПА,Б,С (обратные истинные пеленги), т.е.
-
ОИПА,Б,С = ИПА,Б,С ± 180°;
Примечание:
На МНК линии ИП (ОИП) проводятся (карандашом) не от самого ориентира (А, Б, С) и не до кромки МНК, а только в районе счислимого места судна и длиной не более 5 ÷ 10 см.
При получении точки пересечения этих пеленгов на МНК эти проведенные линии стираются резинкой и остается только то, что показано на рис.5.23.
Рис.5.23. Оформление обсервации на путевой карте
В точке пересечения пеленгов нанести условное обозначение обсервованного места () судна и рядом с ним подписать ;
На момент (время) измерения пеленгов на ориентиры (Т1) нанести на путевую карту счислимое место (РОЛ = ОЛ1 – ОЛ0; SЛ = КЛ · РОЛ; t = Т1 – Т0; SОБ = VОБ · t; SЛ = SОБ от по ИК).
Определить направление (от счислимого места на обсервованное место 120°) и величину (расстояние в милях до десятой доли между счислимым и обсервованным местами на время Т1) невязки С = 120° – 2,2 мили; обозначить саму невязку условным знаком на карте ();
Оформить запись в судовом журнале.
Для повышения точности места судна ориентиры необходимо подбирать таким образом, чтобы угол между двумя соседними пеленгами был не < 30° но и не > 150° (самый оптимальный вариант – 120°, если ориентиры с обоих бортов, или – 60°, если ориентиры с одного борта).
При нанесении обсервованного места на путевую карту может получиться и так, что пеленги не пересекутся в одной точке, а образуют треугольник (рис.5.24).
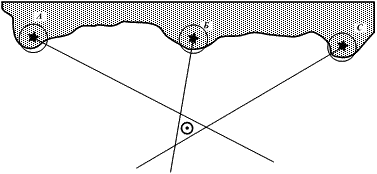
Рис. 5.24. Треугольник погрешности
Как поступать в этом случае? Где находится обсервованное место судна?
А поступать следует так:
Если треугольник погрешности мал (его стороны менее 5 мм – что соответствует на путевой карте < 5 кб.), то обсервованное место судна принимают в центре треугольника (рис. 13.3).
Если треугольник погрешности велик (его стороны > 0,5 мили), а это говорит о том, что или в измерениях пеленгов или в расчете и прокладке их на навигационной карте допущена ошибка (промах) и следует, прежде всего, проверить расчеты пеленгов и прокладку их на путевой карте. Если ошибок и промахов здесь нет, то следует повторить наблюдения (измерить снова пеленги на ориентиры).
Причинами образования большого треугольника погрешностей могут быть:
Допущена ошибка в опознании ориентира (измерили пеленг на один, проложили от другого);
Допущена ошибка в снятии пеленга (довольно часто по небрежности);
Поправка курсоуказателя не соответствует принятой;
Допущена ошибка в прокладке пеленгов на карте;
Неодновременное пеленгование ориентиров.
Для уменьшения погрешностей, возникающих от неодновременного пеленгования ориентиров, особенно на больших скоростях судна, первыми следует измерять пеленги на те ориентиры, которые расположены ближе всего к диаметральной плоскости судна (пеленг меняется не так быстро, как пеленг на ориентиры близкие к траверзу судна) – рис.5.25.
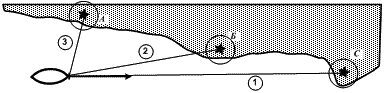
Рис. 5.25. Очередность пеленгования ориентиров
Определение места судна по визуальным пеленгам на три ориентира, является одним из основных способов определения места при плавании судна вблизи берега (на дальности видимости ориентиров) для обеспечения навигационной безопасности плавания.
Отсутствие треугольника погрешности (когда все три пеленга пересекаются в одной точке) позволяет судить о надежности обсервации и отсутствии промахов как при наблюдениях, так и при их исправлении и нанесении на путевую навигационную карту.
Определение места по пеленгам на два ориентира
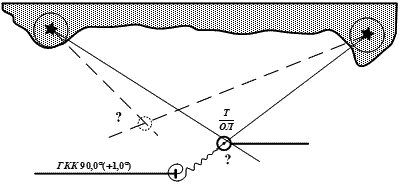
Рис.5.26. Определение места судна по пеленгам на два ориентира
В тех случаях, когда визуально наблюдаются не три ориентира, а только два, место судна можно определить по двум пеленгам на эти ориентиры, так как для получения обсервованного места достаточно минимум две навигационные изолинии.
Методика определения места по двум пеленгам аналогична методике определения места судна по пеленгам на три ориентира, но при этом следует учитывать то, что:
Если допущен промах (ошибка) в опознании ориентиров или
Если поправка курсоуказателя известна с большой ошибкой (неверна) или
Если пеленги на ориентиры измерены неточно
… то место судна, определенное по пеленгам на два ориентира, будет не соответствовать фактическому и никакие признаки не укажут на ошибочность определения места судна (рис.5.26).
Поэтому, к такому способу определения места судна (по двум пеленгам), следует прибегать лишь в тех случаях, когда нет другой возможности определить место.
Для того, чтобы быть уверенным, что место судна, определенное по двум пеленгам достоверно – необходимо такое определение выполнить несколько раз с небольшим (10 ÷ 15 мин.) интервалом времени между очередными обсервациями.
Если обсервованные таким способом места будут располагаться на одной линии параллельной линии курса судна (курс судна не менялся) и на расстояниях, пропорциональных (равных) пройденным судном (SЛ) за промежутки между обсервациями – то место будет достоверным и его можно принять к дальнейшему счислению.
Определение места судна способом «крюйс-пеленг»
Если в видимости судна имеется только один навигационный ориентир, который нанесен на путевую карту, то определить место судна можно по разновременным наблюдениям одного и того же навигационного ориентира – способом «крюйс-пеленг».
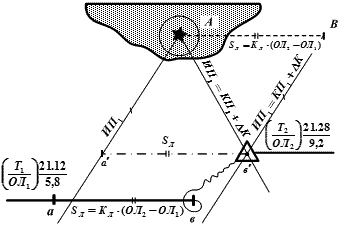
Рис. 5.27. Способ «крюйс-пеленг»
Для определения места судна таким способом необходимо (рис. 5.27):
Измерить компасный пеленг на навигационный ориентир А (КП1), записать время (Т1) и отсчет лага (ОЛ1). На это время (Т1) нанести на путевую карту счислимое место судна (т. а).
Через определенное время (пеленг на ориентир А должен измениться на угол не менее чем на 30°) в момент времени (Т2) при отсчете лага (ОЛ2) измерить еще раз компасный пеленг на ориентир А (КП2).
Рассчитать значение ИП2 = КП2 + ΔК и провести его на навигационной карте от места ориентира А (ОИП2 = ИП2 ± 180°).
Рассчитать расстояние, которое прошло судно за время между измерениями пеленгов: SЛ = КЛ · (ОЛ2 – ОЛ1) или S = V · (Т2 – Т1).
Нанести на навигационную карту счислимое место судна на момент измерения КП2 (т. в).
От места ориентира (т. А) проложить линию параллельную линии пути судна и отложить по ней рассчитанное расстояние SЛ ( и ) получим вспомогательную точку (т. В).
Рассчитать значение ИП1 = КП1 + ΔК и проложить его от т. В (ОИП1 = ИП1 ± 180°).
В точке пересечения пеленгов (ИП1 и ИП2) условным знаком () нанести на путевую карту счислимо-обсервованное место, рядом с ним подписать .
.
Обозначить на карте невязку (С), определить ее направление (52°) и величину (1,2 мили).
Оформить запись в судовом журнале.
При определении места судна способом «крюйс-пеленг» необходимо стремиться к тому, чтобы изменение пеленга на ориентир было не менее чем 30° и, в то же время, чтобы промежуток времени между наблюдениями был как можно меньше. Лучше всего, когда ориентир находится сравнительно на небольшом удалении от судна, а курсовой угол на него близок к траверзному.
Способ «крюйс-пеленга» невозможен в исполнении, если:
Ориентир находится на острых носовых (кормовых) курсовых углах;
Судно не имеет хода;
При небольшой скорости судна и значительном расстоянии до ориентира.
Определение места судна по расстояниям до трех ориентиров,
измеренных с помощью навигационной РЛС
Этот способ является наиболее удобным и точным.
Измеренному расстоянию до какого-либо ориентира соответствует навигационная изолиния – окружность с центром в точке ориентира, до которого измерялось расстояние и радиусом, равным истинному значению этого расстояния.
Для получения обсервованного места достаточно одновременно (почти одновременно) измерить расстояния до трех ориентиров. Точка пересечения навигационных изолиний – окружностей (их дуг) радиусами D1, D2 и D3 – даст нам обсервованное место судна.
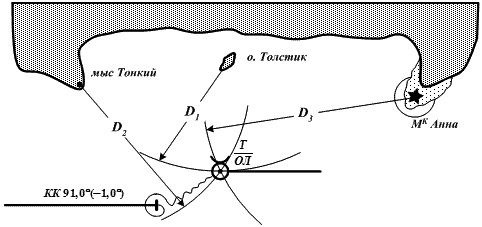
Рис. 5.28. Определение места судна по расстояниям до трех ориентиров
Выполнение способа (рис.5.28):
Включить навигационную РЛС, подобрать по путевой навигационной карте три навигационных ориентира разнесенных по горизонту.
В быстрой последовательности, с помощью навигационной РЛС, измерить расстояния до этих ориентиров, заметить время (Т) и отсчет лага (ОЛ).
Рассчитать истинные значения расстояний до ориентиров, то есть измеренные навигационной РЛС расстояния исправить ее поправкой
D1(2,3) = DP1(2,3) + ΔDP
На путевой навигационной карте провести окружности (их дуги) с центрами в местах ориентиров, до которых измерялись расстояния и радиусами, равными исправленным значениям измеренных расстояний – R1(2,3) = D1(2,3).
Точка пересечения всех трех окружностей (их дуг) и даст нам искомое обсервованное место судна. Обозначить его условным знаком () и подписать рядом с ним время (Т) и отсчет лага (ОЛ).
На момент измерения расстояний до ориентиров (Т) нанести на карту счислимое место, обозначить невязку, снять ее направление и величину (С = 58° – 1,7 мили).
Определение места судна по пеленгу и расстоянию до ориентира
Данный способ определения места судна относится к комбинированным.
Комбинированными называются такие способы определения места, в которых измеряются различные навигационные параметры:
пеленг на ориентир и расстояние до него;
пеленг на ориентир А и горизонтальный угол между ориентирами А и Б;
пеленг на ориентир и глубина места и др.
Рассмотрим наиболее часто употребляемый на практике способ определения места судна по пеленгу на ориентир и расстоянию до него (рис.5.29).
Удобство этого способа состоит в том, что для его реализации используется всего лишь один ориентир, а навигационные изолинии – прямая линия для пеленга и окружность для расстояния – пересекаются под оптимальным углом 90°.
В быстрой последовательности (с помощью НРЛС) измерить направление на ориентир (РЛП) и расстояние (дистанцию) до него. Зафиксировать время (Т) и отсчет лага (ОЛ).
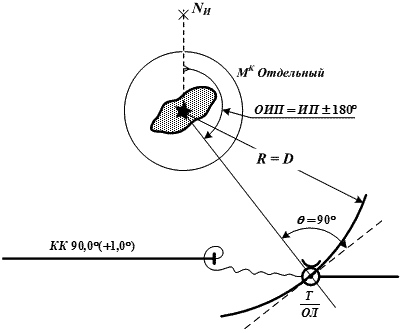
Рис. 5.29. Определение места судна по пеленгу и расстоянию до одного ориентира
Исправить (при необходимости) измеренные направления (КП или РЛП) и расстояние (DР) соответствующими поправками, то есть получить истинные значения навигационных параметров
ИП = РЛП + ΔГК, ИП = ГКП + ΔГК, D = DР + ΔDР
Проложить на путевой навигационной карте изолинии:
пеленга – прямая линия, проходящая через место ориентира;
расстояния – окружность (ее дуга) радиусом R = D с центром в месте ориентира.
В точке пересечения навигационных изолиний условным обозначением нанести (обозначить) обсервованное место судна ( или ), подписать рядом с ним время (Т) и отсчет лага (ОЛ).
На время (Т) измерения навигационных параметров (РЛП и DР) нанести на карту счислимое место судна, обозначить невязку, снять ее направление и величину (С = 102° – 2,2 мили).
Одними из наиболее распространенных способов определения места судна являются определения с помощью РНС и КНС. Береговые станции РНС или космические навигационные аппараты (спутники) создают электромагнитное поле, параметры которого (амплитуда, фаза, разность фаз и т. п.) известным образом связаны с положением приемного устройства на поверхности Земли, т. е. с географической системой координат. Приемное устройство на судне измеряет эти параметры и пересчитывает их в географические координаты.
На карте обсервованное место судна обозначают стандартным условным значком.
Как правило, счислимое и обсервованное места не совпадают. Расхождение между счислимым и обсервованным местами на один и тот же момент времени называется невязкой. Она характеризуется направлением от счислимого места на обсервованное и расстоянием между ними. На карте невязка показывается затухающей волнистой линией, соединяющей счислимое место с обсервованным.
Правила оформления графического счисления определены международным стандартом (в Украине стандарт оформления графического счисления приведен в РШСУ - 98).
Выводы
Процесс определения текущего места судна путем непрерывного и последовательного учета его движения относительно исходного места называется счислением пути судна. Место судна, полученное на основе счисления его пути, называется счислимым.
В качестве стандартной характеристики оценки точности применяется 95% круг погрешностей места с центром в оцениваемой точке, который захватывает действительное место судна с постоянной вероятностью 0,950.
Процесс получения координат места судна по данным от внешних источников называется определением места судна или обсервацией. При плавании судна в видимости берегов определение места по визуальным пеленгам, взятым одновременно на три и более ориентиров есть уверенная гарантия в надежности места судна, если все пеленги пересекутся в одной точке.
Обсервованное место судна по визуальным пеленгам на два береговых ориентира не дает уверенности в точности такой обсервации, так как два пеленга всегда пересекутся в одной точке, независимо от того есть в них промахи или нет.
При использовании способа «крюйс-пеленг» получаем не обсервованное, а счислимо-обсервованное место судна, так как не исключаются погрешности счисления за время плавания между замерами пеленгов.
Расстояния до видимых навигационных ориентиров в море определяются как визуально, так и с помощью технических средств.
Место судна в море можно определить по расстояниям до 3-х, до 2-х ориентиров.
Наиболее точно место судна может быть определено по расстояниям до 3-х и более ориентиров.
Наиболее быстрый и достаточно точный способ определения места судна в море по пеленгу и расстоянию до одного (точечного) ориентира по данным судовой РЛС.
Лекция 6.