Содержание учебной дисциплины Основы судовождения
 Скачать 1.99 Mb. Скачать 1.99 Mb.
|

Тема: Технические средства судовожденияПлан: Введение.
Выводы. Введение Для осуществления безопасного плавания необходимо измерять и обрабатывать большой объем навигационной информации. Значительная часть этой информации измеряется и обрабатывается с помощью технических средств навигации, к которым относятся: курсоуказатели, лаги, эхолоты, радары, навигационные информационные системы, космические навигационные системы, радионавигационные системы, радиомаяки.
Искусственный спутник Земли (ИСЗ) – искусственно созданное небесное тело, обращающееся вокруг Земли только под действием силы ее притяжения, без участия каких-либо других сил. Орбита ИСЗ – траектория его движения относительно центра Земли. Плоскость орбиты всегда проходит через центр Земли. Малый круг в пределах которого могут приниматься радиосигналы ИСЗ называется зоной радиовидимости. Координаты ИСЗ на любой момент времени определяются по формулам сферической тригонометрии. Необходимым элементом СНС, основанной на использовании навигационных космических аппаратов (НКА), является комплекс наземных станций – наземный контрольно-измерительный комплекс. Определение места судна по НКА сводится к отысканию точки пересечения линий положения на поверхности земного сфероида. Место судна в море при помощи НКА можно определить измеряя расстояния до НКА, направления на НКА в горизонтной системе координат, разность расстояний до нескольких последовательных положений НКА на орбите, скорость и ускорение сближения с НКА. Доплеровский метод определения линии положения при помощи НКА можно осуществить дифференциальным или траверзным способами. Методами определения места судна с помощью навигационных спутников являются дальномерный, псевдодальномерный, разностно-дальномерный и радиально-скоростной. В составе современных ГНСС (и «ГАЛИЛЕО» ЕС в перспективе) второго поколения ГЛОНАСС (РФ) и GPS (США) функционируют три основные подсистемы: 1) подсистема навигационных космических аппаратов – космический сегмент; 2) подсистема контроля и управления – наземный командно-измерительный комплекс (КИК) – сегмент управления; 3) подсистема навигационной аппаратуры потребителей (НАП) – судовые приемоиндикаторы. Глобальная навигационная спутниковая система (ГНСС) предназначена для непрерывного и высокоточного определения координат места различных объектов, их курса и скорости, в любой точке Земли или околоземного пространства в любое время суток и в любую погоду. Точность определения координат места судна с помощью ГНСС находится в пределах 100 м для вероятности 0,95, а при приеме и обработке сигналов дифференциальных поправок не более 10 м для вероятности 0,95. Особенности навигационного использования ИСЗ (НКА)Использование ИСЗ (далее НКА) в качестве подвижных опорных станций спутниковой навигационной системы (СНС) открывает широкие возможности для решения навигационной задачи определения места судна в море. Однако, применение быстро перемещающихся в пространстве опорных станций для навигационных целей, возможно лишь в том случае, если пространственные координаты этих станций (НКА) относительно земной поверхности в момент измерения навигационных параметров известны с необходимой точностью. Это условие может быть выполнено при соблюдении двух условий:
Радионавигационные параметры определяются сравнением заранее предвычисленных (на основании законов движения НКА) с измеренными. При круговой орбите НКА предвычисленные значения определяемых радионавигационных параметров можно получить по формулам сферической тригонометрии (рис.6.1) из параллактического треугольника спутника ZCPN в котором:
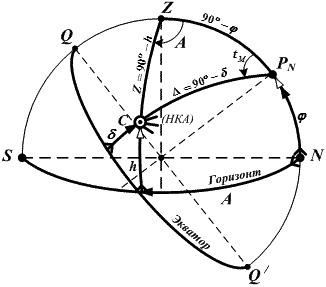 Рис. 6.1. Параллактический треугольник НКА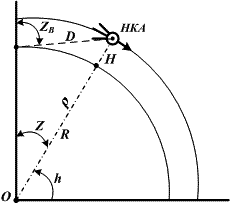 Рис. 6.2. Зенитное расстояние НКАРасстояние до НКА (D) находится из соотношения:
где cosZ = sinδ · sinφ + cosδ · cosφ · costM Движение НКА в первом приближении подчиняется законам Кеплера. Однако, вследствие сопротивления атмосферы и влияния аномалий гравитационного поля Земли фактическое движение НКА по своей орбите отклоняется от расчетного, поэтому необходимо систематически наблюдать за движением НКА с Земли и своевременно вносить поправки в информацию о его фактических пространственных координатах. Одновременно с этой информацией должна передаваться информация, позволяющая привести наблюдения за движением НКА на наземных пунктах и навигационные определения по этим НКА к единой системе времени. Следовательно, необходимым элементом СНС, основанной на использовании НКА, является комплекс наземных станций, наблюдающих за движением НКА, входящих в эту СНС, обеспечивающих информацию об их движении и привязку всех измерений в едином для всей системы времени. Этот комплекс называется наземным контрольно-измерительным комплексом (КИК). Таким образом, использование НКА в качестве подвижных опорных станций не исключает и наземные опорные станции, координаты которых определены очень точно. Далее предполагается, что на судне имеется информация о параметрах движения НКА по орбите и известно время, к которому отнесена эта информация. Для судна одна поверхность положения (высота) всегда известна. Поэтому определение места судна по НКА сводится к отысканию точки пересечения линий положения на поверхности земного сфероида. Существенное значение для работы СНС, основанной на использовании НКА, имеет большая скорость изменения радионавигационных параметров, определяемых при помощи этой системы, позволяющая применять методы навигационных определений, основанные на измерениях скорости и ускорения сближения НКА и судна. Эти методы осуществляются посредством наблюдения за приращением частоты принимаемых от НКА сигналов, возникающих вследствие эффекта Доплера. Одной из особенностей навигационного использования НКА, обусловливаемой своеобразным характером его движения относительно земной поверхности, является различие условий геометрической видимости НКА на различных широтах в зависимости от параметров орбиты. Способы радионавигационных определений по НКАУсловия навигационных определений с движущегося судна относительно подвижной или неподвижной опорной станции различаются между собой только скоростью изменения навигационных параметров, определяемых относительно опорных станций. Вследствие этого навигационное определение при помощи НКА можно производить теми же способами, что и при использовании РНС с неподвижными опорными станциями. Однако, большие скорости изменения навигационных параметров:
С учетом перечисленных особенностей при помощи НКА можно определять место судна в море, измеряя:
Расстояния до НКА можно измерять способами: 1) «запрос-ответ» и 2) с помощью «двух генераторов». Определение направлений, то есть высоты (зенитного расстояния) и азимута на НКА, методически не отличается от определения направлений на небесные светила. Разность расстояний до нескольких последовательных положений НКА можно получить, измеряя величину угла изменения фазы принимаемого сигнала, за счет изменения длины пути, проходимого этим сигналом между НКА и судном. Такое измерение можно осуществить по блок-схеме (рис.6.3) путем непрерывного сравнения частоты колебаний, принимаемых от НКА, с частотой колебаний опорного генератора и интегрирования набега фазы за счет эффекта Доплера. 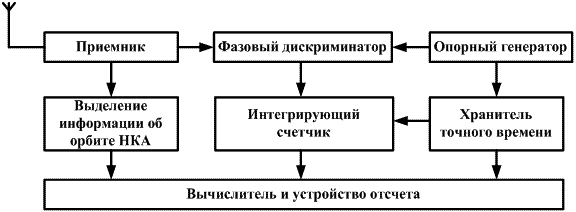 Рис. 6.3. Блок-схема доплеровского метода определения линии положенияОсновным условием выполнения измерений по этой схеме является равенство частоты (ωИ) колебаний, излучаемых с НКА и частоты (ω0) колебаний опорного генератора. Хотя доплеровское приращение частоты принимаемых колебаний здесь непосредственно не измеряется, а используется лишь для измерения суммарного сдвига фаз сравниваемых колебаний, рассмотренный фазовый метод определения разности расстояний до НКА часто называют доплеровским методом. Доплеровский метод определения линии положения при помощи НКА можно осуществить двумя основными способами: 1) дифференциальным и 2) траверзным. Дифференциальный способ измерения скорости сближения сводится к прямому измерению мгновенных значений разности частот принимаемых колебаний и колебаний местного опорного генератора (рис.6.4). 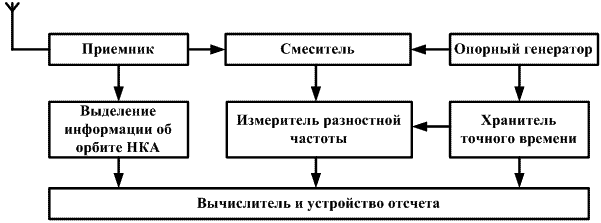 Рис. 6.4. Блок-схема дифференциального способа измерения скорости сближения с НКАЕсли частота ωИ = ω0, то величина доплеровского приращения частоты при известных значениях ωИ и υФ определяет значение производной dD / dt, то есть скорость сближения НКА и судна. Траверзный способ измерения ускорения сближения с НКА осуществляется путем определения момента прохождения доплеровского приращения частоты (Δωд) через нуль и сводится к измерению скорости изменения частоты в этот момент. Так как в момент, когда Δωд = 0, судно находится на траверзе орбиты НКА, этот способ и называют траверзным. Измеренное значение скорости изменения частоты определяет вторую производную от расстояния до НКА по времени, то есть ускорение сближения НКА и судна. Траверзным способом определения координат места судна за одно прохождение НКА можно получить всего лишь две линии положения, пересекающихся под углом 90°. Малое количество получаемой информации является наиболее существенным недостатком траверзного способа. Однако этот недостаток компенсируется более простой обработкой получаемой информации, что позволяет определять место судна по НКА без специальной судовой ЭВМ. Методы определения места судна по НКАОсновным содержанием навигационной задачи, решаемой с помощью навигационной аппаратуры потребителя (НАП), является определение пространственно-временных координат подвижного объекта (судна), а также составляющих его скорости. В результате решения навигационной задачи должен быть определен вектор состояния судна. Непосредственно измерить элементы вектора состояния не представляется возможным. У принятого с НКА радиосигнала определяют отдельные его параметры (например, задержку или доплеровский сдвиг частоты). Поэтому измеряемый в интересах навигации параметр радиосигнала называют радионавигационным, а соответствующий ему геометрический параметр – навигационным. Например, задержка радиосигнала и его доплеровское смещение частоты (fДОП) являются радионавигационными параметрами, а соответствующие им дальность до судна (D) и радиальная скорость сближения (Vρ) – навигационными параметрами. Геометрическое место точек пространства с одинаковым значением навигационного параметра называется поверхностью положения. Пересечение двух поверхностей положения определяет линию положения – геометрическое место точек, имеющих два определенных значения двух навигационных параметров. Местоположение судна определяется координатами трех поверхностей положения или двух линий положения. Иногда (из-за нелинейности) две линии положения могут пересекаться в двух точках. Тогда, для нахождения места судна, необходимо использовать дополнительную поверхность положения или другую информацию о его месте. Для решения навигационной задачи используют функциональную зависимость между навигационными параметрами и компонентами вектора состояния судна . Соответствующие функциональные зависимости называются навигационными функциями. Навигационные функции получают различными методами, основные из которых:
Могут быть использованы и другие методы и их комбинации, в том числе и для определения ориентации судна. Структура глобальных навигационных спутниковых системГлобальная навигационная спутниковая система (ГНСС) предназначена для непрерывного и высокоточного определения координат места различных подвижных объектов, их курса и скорости в любой точке Земли или околоземного пространства, в любое время суток и в любую погоду. В настоящее время навигационные спутниковые системы нашли самое широкое применение в различных сферах человеческой деятельности, но особое место в силу своих положительных свойств (глобальность, высокая точность, независимость от погодных условий, времени суток и сезона) они нашли на транспорте. Качественный облик (структура, способы функционирования и эксплуатационные характеристики) ГНСС во многом обусловлены требованиями потребителей к точности навигационного обеспечения и методам навигационных измерений. Для достижения непрерывности определения места судна в любом районе Мирового океана вне зависимости от погоды, сезона и времени суток в составе современных ГНСС второго поколения ГЛОНАСС (РФ) и GPS (США) функционируют три основные подсистемы:
Основной задачей, решаемой ГНСС, является определение пространственных координат местоположения подвижного объекта и времени. Эта задача реализуется путем вычисления искомых навигационных параметров непосредственно в приемоиндикаторе на основе беззапросных (пассивных) дальномерных измерений по сигналам нескольких видимых НКА с известными координатами. Применение беззапросных измерений обеспечили возможность достижения неограниченной пропускной способности ГНСС. Для определения места судна одновременно принимают данные не менее чем от трех НКА (рис.6.5). При пересечении линий положения I–I, II–II, III–III может получиться фигура погрешностей (треугольник). В этом случае вероятнейшее место судна будет находиться в точке пересечения биссектрис вершин (внутренних углов) треугольника погрешности (рис.6.6). 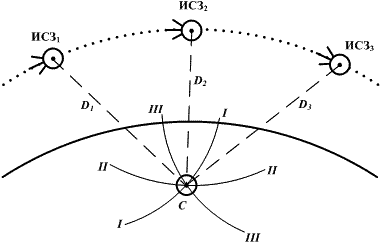 Рис. 6.5. Принцип определения места судна по ГНСС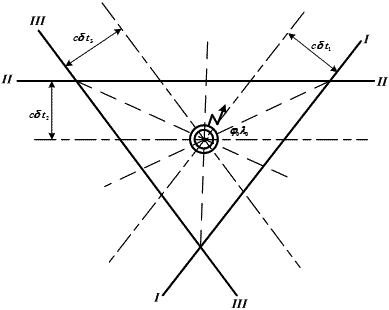 Рис. 6.6. Треугольник погрешностей при определении места судна по ГНССТреугольник погрешностей получается из-за присутствия в измеренных расстояниях D1,2,3 постоянных погрешностей сδt. Найдя место судна (φ0 λ0) методом биссектрис можно найти и постоянную погрешность сδt, возникающую из-за расхождения временных шкал НКА и ПИ. Геометрия орбитальной группировки позволяет обеспечивать одновременную радиовидимость в любой точке земного шара и в любое время суток не менее четырех НКА. Все НКА работают в одной полосе частот и передают навигационные сигналы одинаковой структуры, позволяющие в аппаратуре потребителей измерять псевдодальность системы «объект-НКА». Кроме того, измеряется доплеровский сдвиг частоты сигнала НКА, который используется для измерения скорости объекта. Псевдодальности используются для определения координат места и вычисляются путем измерения времени прохождения сигнала на трассе «НКА-объекта». Наиболее точное определение места обеспечивается при углах между направлениями «НКА-объект» близких к 90°. Сравнительная характеристика ГНССНизкоорбитальные СНС первого поколения «Транзит» (США) и «Цикада» (РФ) имели существенные недостатки:
С целью преодоления этих недостатков сначала в США, а потом и в России было принято решение начать работы над созданием СНС нового поколения. В США первоначально она называлась «НАВСТАР» (Navigation Satellite providing Time And Range), то есть «навигационная спутниковая система, обеспечивающая измерение времени и местоположения». В настоящее время система получила название GPS. В России – ГЛОНАСС – глобальная навигационная спутниковая система. В 2008 г. введена в действие ГНСС «ГАЛИЛЕО» (ЕС). Основное назначение GPS и ГЛОНАСС – высокоточная навигация подвижных объектов в космосе, в воздухе, на воде и земле. Системы GPS (США) и ГЛОНАСС (РФ) хотя и выглядят весьма похожими, но в то же время имеют ряд существенных отличий. К ним относятся:
Различия между GPS и ГЛОНАСС, хотя и создают проблемы при разработке НАП, но они принципиально преодолимы, а их совместное использование позволяет повысить доступность и целостность ГНСС, а также точность определения координат места.
Навигационные радиолокационные станции (НРЛС) являются дальномерно-азимутальными радионавигационными средствами . Дальность действия НРЛС зависит от отражающей площади ориентира, условий распространения радиоволн, мощности и длительности излучаемого радиоимпульса и др. (25÷50 миль max). Практика судовождения показывает, что для измерения расстояний до ориентиров чаще всего используют именно НРЛС, а в условиях плохой видимости – только НРЛС. Судовые РЛС служат для обеспечения безопасности мореплавания в условиях ограниченной видимости. Кроме того, с их помощью решается ряд навигационных задач: а) определение места при плавании в прибрежных водах; б) предупреждение столкновения со встречными судами и другими надводными препятствиями в открытом морс и в узкости; в) проводка в узкости. РЛС используется главным образом для измерения расстояний. К радиолокационному пеленгованию рекомендуется прибегать лишь при плохой зрительной видимости. На промысле с помощью РЛС решают широкий круг навигационных задач: определяют в процессе траления скорость судна относительно Земли, скорость и направление течения в районе промысла, элементы циркуляции при поворотах с тралом, при его спусках и подъемах, скорость и направление дрейфа судна с застопоренной машиной, направление и расстояние до других добывающих судов, обеспечивают сохранность орудий лова путём применения метода опасного расстояния. Для надежного определения места с помощью РЛС необходимо быть уверенным в правильном опознании объектов, наблюдаемых на экране индикатора. Наиболее точно могут быть опознаны объекты, называемые точечными ориентирами. К ним относятся обозначенные на карте небольшие островки, отдельно лежащие камни, скалы, плавучие знаки навигационного ограждения, оконечности молов и причалов, а также радиолокационные маяки-ответчики. Хорошее изображение, отвечающее по форме очертаниям берега на карте, дают высокие обрывистые берега. Такой берег может быть опознан достаточно уверенно. Низменные песчаные мысы, плоское побережье, покрытые снегом пологие берега, плавучий лед рассеивают энергию и могут не давать эхо-сигналов. В результате этого возвышенные полуострова, соединяющиеся с основным берегом низкими перешейками, могут изображаться на экране РЛС как острова. Если мыс имеет пляж, за которым лежит обрывистый склон, то при пеленговании или измерении расстояния до такого мыса легко ошибиться, так как урез воды на определенных расстояниях радиолокатор не обнаружит. Ошибки при измерении расстояний до берега особенно вероятны в морях, имеющих низкие берега и значительные колебания уровня воды. Обычно уже на расстоянии от 15 до 8 миль изображение на экране индикатора достаточно верно передает очертания береговой черты, что позволяет сопоставлять его с картой. Для определения места могут быть использованы радиолокационные расстояния до опознанных на экране РЛС объектов или пеленги этих объектов. 3. Интегрированные комплексы ходового мостика судна Интегрированная Мостиковая Система (ИМС) это сопряженные в единый комплекс системы судовождения и управления судном с целью повышения эффективности обработки информации и управления судном, обеспечивающий повышение навигационной безопасности плавания. ИМС предназначена, чтобы решать главную задачу - обеспечивать штурмана возможностью использовать все инструменты и контроль, необходимый в регулировании и маневрировании судна в обычной и нестандартной ситуации. Все корабельные системы скоординированы с единой системе времени, которая также скоординирована с GPS - Global Positioning System. ИМС размещается на ходовом мостике судна для: - осуществления судовождения и обеспечения навигационной безопасности плавания - управления отдельными системами и устройствами судна - управления средствами судовой связи, в т.ч. спутниковой радиосвязи - сбора и обработки информации от технических средств судна. - создания на основе собранной информации единого информационного поля данных - распределение информации и её вывод на средства отображения для обеспечения выполнения должностными лицами своих функциональных обязанностей. Система может включать любые комбинации радаров, радаров с необходимыми элементами ЭНК, ЭКНИС, либо ЭКНИС с наложением радарной картинки. Состав интегрированной мостиковой системы В состав ИМС, как правило, входит следующее оборудование: - Электронные Картографические Навигационные Информационные Системы (ЭКНИС/ЭКС); - два радара и средства для отображения радиолокационной информации; - система управления положением и движением судна; - регистратор данных о рейсе (черный ящик); - система обобщенной сигнализации по всем техническим средствам судна; - средства внешней и внутренней судовой связи, в том числе радиосвязи; - аппаратура автоматической идентификационной системы (АИС); - система приема карт прогноза погоды; - система приема данных об общей морской обстановке; - система дистанционной актуализации (корректуры) электронных карт; - телевизионная система наблюдения дневного и ночного видения с лазерной подсветкой целей. Основные функции: - объединение, обработка, оценка и сопоставление данных, поступающих от всех датчиков информации; - обеспечение надежного распределения информации в системе; - комплексное графическое представление первичных навигационных данных (координаты, курс, скорость, глубины и др.), вторичной (отселектированной) информации и данных, получаемых от смежных систем и судов; - одновременная визуализация нескольких процессов для одного оператора; селективное представление информации от радионавигационных и оптикоэлектронных средств; - генерация аварийно - предупредительных сигналов о навигационных опасностях; - обработка и представление оператору данных об аварийно - предупредительных сигналах от судовых систем и оборудования; выполнение обмена навигационными данными в группе совместно маневрирующих судов - работа в режимах полной или сокращенной вахты на ходовом мостике; - контроль работы судового оборудования и систем с предоставлением информации оператору в том помещении судна, где это необходимо; - полуавтоматическое управление движением и положением судна, - предвычисление и прогнозирования тактических элементов движения (точек встречи, предпочтительных траекторий движения, опасных или рекомендованных для перемещения зон); - возможность стыковки с внешними автоматизированными системами и комплексами; - система координированного управления движением судна («джойстиковое управление») от одной рукоятки; - обеспечение работы вспомогательных информационных систем, в том числе информационной поддержки борьбы за живучесть, информирования экипажа о состоянии судна и прогнозирования ситуации; - обеспечение судоводителя системами внешней и внутрикорабельной связи с коммутацией каналов, в том числе связи в системе ГМССБ; - обеспечение технических средства навигационного, тактического и управляющего сегментов ИМС бесперебойным питанием: основным, резервным и аварийным; - совмещение в многооконном режиме на экранах многофункциональных дисплеев отображений радиолокационной, картографической и информации и данных, поступающих от систем управления; - контроль за собственным состоянием системы и возможность ее корректной деградации до последнего работоспособного источника информации или многофункционального дисплея. Электронно-Картографические Навигационные Информационные СистемыЭлектронно-Картографические Навигационные Информационные Системы (ЭКНИС) – одно из наиболее эффективных навигационных средств, автоматизирующих процесс судовождения, обеспечивая штурмана полной информацией от всех подключенных навигационных датчиков на электронной карте. Совмещение всей информации на одном дисплее позволяет оценить обстановку и принять решение в кратчайшее время. Большое количество функциональных возможностей ЭКНИС позволяет существенно экономить ходовое время и эксплуатационные расходы. повышения эффективности деятельности судоводителя за счет оперативной обработки большого объема информации от навигационных приборов в реальном масштабе времени с отображением места судна и результатов решения навигационных задач на электронной карте. Выводы Искусственный спутник Земли (ИСЗ) – искусственно созданное небесное тело, обращающееся вокруг Земли только под действием силы ее притяжения, без участия каких-либо других сил. Координаты ИСЗ на любой момент времени определяются по формулам сферической тригонометрии. Необходимым элементом СНС, основанной на использовании НКА, является комплекс наземных станций – наземный контрольно-измерительный комплекс. Определение места судна по НКА сводится к отысканию точки пересечения линий положения на поверхности земного сфероида. В составе современных ГНСС (и «ГАЛИЛЕО» ЕС ) второго поколения ГЛОНАСС (РФ) и GPS (США) функционируют три основные подсистемы: 1) подсистема навигационных космических аппаратов (НКА) – космический сегмент; 2) подсистема контроля и управления – наземный командно-измерительный комплекс (КИК) – сегмент управления; 3) подсистема навигационной аппаратуры потребителей (НАП) – судовые приемоиндикаторы. Глобальная навигационная спутниковая система (ГНСС) предназначена для непрерывного и высокоточного определения координат места различных объектов, их курса и скорости, в любой точке Земли или околоземного пространства в любое время суток и в любую погоду. Точность определения координат места судна с помощью ГНСС находится в пределах 100 м для вероятности 0,95, а при приеме и обработке сигналов дифференциальных поправок не более 10 м для вероятности 0,95. Судовые РЛС служат для обеспечения безопасности мореплавания в условиях ограниченной видимости. Кроме того, с их помощью решается ряд навигационных задач: определение места при плавании в прибрежных водах; предупреждение столкновения со встречными судами и другими надводными препятствиями в открытом морс и в узкости; проводка в узкости. Интегрированная Мостиковая Система (ИМС) это сопряженные в единый комплекс системы судовождения и управления судном с целью повышения эффективности обработки информации и управления судном, обеспечивающий повышение навигационной безопасности плавания. Лекция 7 |