Содержание учебной дисциплины Основы судовождения
 Скачать 1.99 Mb. Скачать 1.99 Mb.
|

|
Конспект лекций по учебной дисциплине «Основы судовождения» для студентов заочной и курсантов дневной форм обучения направления подготовки 6.030401 «Правознавство» Составил: Бортняк Виктор Викторович Лекция 1. Тема: Содержание учебной дисциплины «Основы судовождения» План: Введение.
Выводы.Введение Морские перевозки - это сложный комплекс организационно-технических мероприятий, частью которого является непосредственная работа судна. Во время плавания на судно влияют неблагоприятные и часто - опасные факторы внешней среды. Работа на море связана с риском, поэтому эффективность работы морского транспорта в значительной степени зависит от того, насколько точно, безопасно для людей, груза и самого судна оно будет проведено в порт назначения, в какой срок и в каком состоянии будет доставлен груз. Проблема обеспечения безопасности мореплавания является важнейшей на морском транспорте, поскольку от ее успешного решения зависит жизнь и здоровье членов экипажей и пассажиров, сохранность судов и грузов, состояние морской среды. Чтобы выбрать безопасный и выгодный путь и провести по нему судно необходимо решить комплекс взаимосвязанных задач. Такого рода задачи называются навигационными задачами. Пример: Ваше судно находится на рейде Одессы. Вам необходимо привести его ко входу в Босфор. Что вам необходимо знать, чтобы начать движение? Задача решается на морской навигационной карте, которая отображает поверхность Земли, имеющей сложную форму. Чтобы ее решить, надо определить положение точек начала и окончания пути судна. Для этого надо знать форму Земли и выбрать систему координат. Также надо знать свойства картографической проекции, в которой построена конкретная карта и систему условных обозначений на ней. Нужно рассчитать наиболее выгодный путь с учетом навигационных опасностей и гидрометеорологических условий. При плавании по маршруту нужно постоянно знать положение судна относительно навигационных опасностей, знать гидрометеорологический прогноз. Судоводителю нужно уметь подобрать необходимую и достоверную информацию и уметь выполнять необходимые расчеты и действия. При этом надо учитывать, что судно является сложным объектом управления. На перемещение судна влияют множество факторов, часть из которых мы не знаем, некоторые не умеем измерять с достаточной точностью, а следовательно и учитывать. Единый процесс, обеспечивающий безопасное плавание и управление судном для достижения намеченной цели, называется судовождением. Таким образом, судовождение - это процесс выбора пути и контроля за движением судна по избранному пути в различных навигационных и гидрометеорологических условиях. Судовождение - прикладная наука о выборе безопасного и выгодного пути судна и обеспечения плавания по выбранному маршруту с учетом влияния внешней среды. Эта наука состоит из следующих дисциплин: - морской навигации; - морской астронавигации; - лоции; - технических средств навигации (ТСН); - маневрирования; - метеорологии и океанографии. Морская навигация – наука о вождении судна в море намеченным маршрутом с учетом влияния внешней среды на направление и скорость судна. Навигация решает главную задачу судовождения - обеспечение безопасности плавания. Слово навигация произошло от латинского navigatio — мореплавание, судоходство. При Петре I мореплавателей называли навигаторами. В настоящее время слово навигация употребляется в двух значениях: в практическом, как период судоходства, (например, зимняя навигация, продление навигации) и в более общем - как наука навигация, изучающая вопросы судовождения. Кроме того, есть наземная, воздушная, космическая, биологическая и другие навигации. Навигация в широком понимании это перемещение объекта или части объекта из одной позиции в другую по намеченному плану. Такие задачи мы с вами решаем (выполняем) повседневно. Например: поездка в академию, движение руки и т. п. Навигация - ведущая наука среди других наук судовождения. Навигация разрабатывает основы судовождения, непрерывного учета движения судна в море, что обеспечивает безопасность плавания. Навигация рассматривает целый комплекс вопросов: основные понятия о Земле; способы определения мореплавателем основных направлений и расстояний на поверхности Земли; методы определения поправок мореходных приборов; ведение прокладки пути судна на морских навигационных картах; определение места судна навигационными способами. Из них главным является ведение прокладки, т. е. построение на карте пути судна и определение места судна различными навигационными способами. Навигация - точная наука, основой для которой является математика. Однако, применяя точные математические методы навигации, не всегда точно можно определить место судна, поскольку в море на него действуют две стихии - водная и воздушная: волны, течения и ветры, смещающие судно с запланированного пути, по которому оно должно передвигаться. Поэтому в навигации, помимо знания теоретических методов, обосновывающих точность судовождения, необходимы опыт и искусство судоводителя. Только знание научных математических основ навигации в сочетании с опытом могут обеспечить безопасность судна в любых условиях плавания Морская астронавигация – часть практической астрономии, рассматривающая ориентирование по небесным светилам во времени, по месту и направлению при движении на море. Лоция изучает условия плавания в океанах, морях на озерах и реках в навигационно-гидрографическом и гидрометеорологическом отношениях. Лоция объединяет также описание навигационных опасностей, средств навигационного оборудования, навигационные пособия. Технические средства навигации рассматривают теорию, устройство и практическое использование навигационных приборов и систем. Маневрирование – теория и практика использования подвижности судна для обеспечения навигационной безопасности плавания. Метеорология и океанография обеспечивают учет фактической погоды и ее прогнозирование, дают рекомендации по учету влияния метеорологических факторов на безопасность плавания. Рекомендованная литература для изучения учебной дисциплины Основная: 1. Алексишин В.Г., Долгочуб В.Т., Белов А.В. Практическое судовождение. – Одесса: «Фенікс», 2005. – 376 с. 2. Басанець М. Г., Михальчук В. В. Основи судноводіння: Навчальний посібник/ Одеська національна морська академія. О..: ФЕНІКС, 2003. -316 с. 3. Ермолаев Г.Г. Морская лоция: учебник для вузов морского транспорта. – 4-е издание, перераб. и дополн. – М.: Транспорт, 1982. – 392 с. Дополнительная: 4. Баранов Ю.К., Гаврюк М.И., Логиновский В.А., Песков Ю.А. Навигация: Учебник для вузов. – 3-е изд. перераб. и доп.С-кт Петербург: Издательство «Лань», 1997. – 512 с. 1. Содержание дисциплины «Основы судовождения» Цель дисциплины: Обеспечение знаниями о средствах и методах судовождения. Содержание: Основные понятия и определения Фигура Земли и ее модели Сущность направлений и курсоуказатели Морские навигационные карты Навигационная прокладка Технические средства судовождения Общие сведения из лоции Навигационное оборудование морских путей Виды аудиторных занятий: Аудиторные занятия проводятся в форме лекций и лабораторных работ (в т. ч. на навигационном тренажере). Самостоятельная работа: В программе дисциплины выделено время для самостоятельной работы курсанта для проработки лекционного материала, подготовки к лабораторным работам, самостоятельного изучения материала, подготовки к модульному контролю. Виды контроля: Контроль освоения дисциплины предусматривает текущий и модульный контроль. Текущий контроль предусматривает оценку каждой лабораторной работы. Модульный контроль проводится в конце семестра (в период лабораторно-экзаменационной сессии). 2. Теория и практика современного судовождения Основой современного судовождения являются накопленные столетиями знания и опыт мореплавания и достижения науки и техники. Теоретические основы морской навигации и астронавигации в основном сформировались к концу 19 столетия. Они базируются на достижениях математики, астрономии, геодезии и картографии. Лоция базируется на информации, накопленной человечеством за всю историю мореплавания. Маневрирование базируется на известных явлениях влияния внешней среды на подвижность судна и непрерывно развивается в связи с постройкой новых судов, маневренные качества которых изменяются. В развитии теории управления судном активное участие принимают ученые нашей академии. Технические средства судовождения непрерывно развиваются и базируются на новейших достижениях науки и техники. В последние десятилетия произошли качественные изменения в методах и средствах судовождения. Установку радиолокатора на суда в начале 40-х годов прошлого столетия можно считать революцией в судовождении. До этого в темное время суток и в условиях плохой видимости судоводитель работал в более экстремальных условиях. Создание глобальных навигационных спутниковых систем значительно повысило точность знания места судна вне видимости берегов, что оказало значительное влияние на безопасность плавания и экономические показатели морских перевозок. Применение компьютерной техники, электронных картографических навигационных систем, интегрированных навигационных мостиков позволило снизить влияние «человеческого фактора» на общее число аварий судов. Однако нельзя забывать, что судоводитель имеет дело с воздействием на судно внешней среды. Это воздействие быстро изменяется, недостаточно изучено, не всегда его можно объективно измерить, информацию, получаемую от ТСН и визуального наблюдения в сложных условиях судоводитель физически не всегда в состоянии обработать. Это приводит к тому, что оценка ситуации и принятие решений зачастую происходят на основе интуиции с использованием личного опыта. Практика судовождения показывает, что традиционные методы навигации, известные с древних времен, не потеряли своей актуальности и в настоящее время. Безаварийное плавание предполагает проведение контрольных наблюдений и вычислений альтернативными методами. Тем более что в случае отказа технических средств навигации традиционные приемы определения места судна остаются единственным средством, позволяющим обеспечить безопасное плавание в самых сложных условиях. Не следует забывать, что судоводитель несет полную ответственность за аварию вне зависимости от того, произошла она из-за его упущения, незначительной ошибки или неверно принятого решения. 3. Навигационная безопасность и охрана человеческой жизни на мореЛюбой вид деятельности содержит в себе определенную долю опасности. В связи с объективным характером и высокой степенью опасностей и рисков в процессе деятельности в Мировом океане, а также экстремальными условиями труда моряков, мореплавание в этом отношении заслуживает особого внимания как отрасль с повышенной опасностью. Рост размеров и скоростей судов, повышение интенсивности судоходства обусловили то, что в современный период одним из наиболее важных аспектов развития мореплавания является необходимость упорядочения движения судов и обеспечения безопасности мореплавания на более высоком уровне. Международный характер судоходства определяет ту роль, которую играет мировое сообщество в решении проблем обеспечения безопасности мореплавания и предполагает использование международных стандартов в рассматриваемой области. В международном масштабе разработкой таких стандартов занимается Международная морская организация, а также морские администрации государств, определяющие и внедряющие такие стандарты применительно к судам, работающим под флагом этих государств. Деятельность по обеспечению безопасности мореплавания требует комплексного подхода и осуществляется в трех направлениях: техническом, организационном и кадровом. Поэтому все нормативные акты, касающиеся безопасности мореплавания, направлены на разработку стандартов в этих трех направлениях. Кроме Международной морской организации (IMO) организациями, входящим в международный механизм обеспечения безопасности мореплавания являются: Всемирная служба навигационных предупреждений (WWNWS), Международная организация морской спутниковой связи (INMARSAT), Международная организация по стандартизации (ISO), Международная палата судоходства (ICS) Международная федерация ассоциации морских капитанов (IFSMA), Институт мореплавания (NI). Основными международными соглашениями по обеспечению безопасности мореплавания являются: Международная конвенция по охране человеческой жизни на море 1974 г. (SOLAS-74), Международная конвенция о грузовой марке 1966 г. (LL-66), Международная конвенция по подготовке, дипломированию моряков и несению вахты, 1978/95 гг. (STCW-78/95), которая лежит в основе Государственных стандартов образования и подготовки украинских моряков, что в свою очередь обеспечивает международное признание дипломов выпускников морских ВУЗов Украины., Конвенция о международных правилах предупреждения столкновения судов в море 1972 г. (COLREG – МППСС-72), Международная конвенция по поиску и спасению на море 1979 г. (SAR), Международная конвенция по предотвращению загрязнения с судов 1973 г. (MARPOL-73/78) и другие. Обязанность каждого мореплавателя – знать, понимать и уметь применять на практике международные и национальные нормативные акты, направленные на обеспечение безопасности мореплавания и охрану морской среды. Выводы Судовождение - прикладная наука о выборе безопасного и выгодного пути судна и обеспечения плавания по выбранному маршруту с учетом влияния внешней среды. Она состоит из морской навигации, морской астронавигации, лоции, технических средств навигации, маневрирования, метеорологии и океанографии. Несмотря на использование в судовождении научных методов и высокоточных технических средств навигации, оценка ситуации и принятие решений судоводителем зачастую происходят на основе интуиции с использованием личного опыта. Проблема обеспечения безопасности мореплавания является важнейшей на морском транспорте. Для решения этой проблемы создан международный механизм обеспечения безопасности мореплавания. Лекция 2. Тема: Фигура Земли и ее моделиПлан: Введение.
ВыводыВведение Штурманский метод решения задач судовождения требует знания закономерностей движения судна по водной поверхности Земли. Морская навигационная карта создается с помощью геодезии и картографии. Решение этих задач возможно лишь при знании формы и основных размеров Земли. Форма Земли определяется распределением масс в ее теле. Массы в теле Земли распределены неравномерно, поэтому Земля имеет сложную форму, не поддающуюся математическому описанию. Кроме того, поверхность суши и дна также имеет сложную форму. 1. Фигура Земли и ее моделиЗемля – третья по счету от Солнца планета Солнечной системы (SСР ≈ 150 млн. км ). Современные представления о фигуре и размерах Земли основываются на многочисленных исследованиях, начало которым было положено в глубокой древности. Еще во II веке до н.э. древнегреческий математик, астроном и географ Эратосфен Киренский считал Землю шаром, радиусом равным 6290 км (по его данным длина экватора LЭ составляет 39 501 км, что оказалось лишь на 574 км меньше фактической – 40 075 км). Форма и размеры Земли изучались и изучаются по результатам астрономических и геодезических измерений, измерений силы тяжести в различных точках земной поверхности. В последние годы некоторые величины, характеризующие фигуру и размеры Земли, уточнены по данным искусственных спутников Земли (ИСЗ) и пилотируемых космических кораблей. Истинная поверхность Земли имеет сложную неправильную форму, которая получила название «геоид» (от греческих слов «Земля» и «вид» или «похожий на Землю»). Геоид – геометрическая фигура, которая совпадает со средней поверхностью вод Мирового океана свободной от приливов, течений и прочих возмущений (т.е. поверхность геоида перпендикулярна отвесной линии во всех его точках). Мы отметили, что геоид имеет сложную и неправильную форму, но для решения различных задач на поверхности Земли необходимо подобрать такую математически правильную фигуру, которая по форме была бы близка к форме геоида. Такой фигурой является эллипсоид вращения (сфероид). Земной эллипсоид – это двухосный эллипсоид вращения:
Такой земной эллипсоид строго определенных размеров является вспомогательной поверхностью для всех геодезических и картографических работ. До 1964 г. каждая страна руководствовалась данными «своего» земного эллипсоида и такой эллипсоид получил название референц-эллипсоида (образец эллипсоида). С 1946 г. на территории бывшего СССР для всех работ принят референц-эллипсоид Красовского Ф.Н. Разность полуосей этого эллипсоида составляет 21 км 382 м. Дополнительные данные к эллипсоиду КрасовскогоБольшая полуось а = 6 378 245 м. Малая полуось b = 6 356 863,019 м. Радиус шара одинакового объема с эллипсоидом Красовского R = 6 371 110 м. Радиус шара одинаковой поверхности с эллипсоидом Красовского R = 6 371 116 м. Радиус шара одинаковой окружности большого круга с длиной меридиана эллипсоида Красовского R = 6 367 559 м. Радиус шара, одна минута дуги большого круга которого равна морской миле (1852 м) R = 6 366 707 м. При решении задач, не требующих высокой точности, сжатием Земли пренебрегают, т.е. принимают Землю за шар. Радиус шара выбирают исходя из определенных условий. Например, при измерении расстояний на море, радиус шара R = 6366 км 707 м (LЭ = 39 983 км). RСР = 6371,1 км (LЭ = 40 010,5 км). 2. Основные точки, линии и плоскости Земли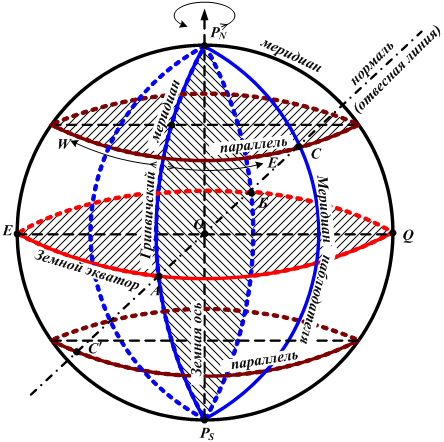 Рис. 2.1. Основные точки, линии и плоскости ЗемлиЗемная ось (рис. 2.1) – воображаемая прямая, вокруг которой Земля совершает свое суточное вращение (≈ 0,5 км/с = 0,464 км/с). Эта ось (PNPS) совпадает с малой осью земного эллипсоида и пересекает поверхность эллипсоида в двух точках, называемых географическими полюсами Земли: – северный – PN, – южный – PS. Северным географическим полюсом (PN) принято считать тот, со стороны которого собственное вращение Земли усматривается против часовой стрелки. Южный географический полюс (PS) – полюс, противоположный северному. Плоскость экватора – плоскость, перпендикулярная земной оси и проходящая через центр шара (эллипсоида). Земной экватор – линия (окружность), образующаяся от пересечения поверхности эллипсоида плоскостью экватора. Земной экватор (линия ЕАQБ) делит земной шар на два полушария:
Плоскости параллелей – плоскости, параллельные плоскости экватора. Параллели – малые круги, образующиеся на поверхности земного эллипсоида при пересечении его плоскостями параллелей. Нормаль (отвесная линия) – прямая, совпадающая с направлением силы тяжести в данной точке. Для т. С – нормалью является прямая линия СОС′, проходящая через центр Земли. Плоскости истинных меридианов – плоскости, проходящие через ось Земли (PNPS). Истинные (географические) меридианы – линии (окружности), образующиеся на поверхности эллипсоида при пересечении его плоскостями истинных меридианов. Меридиан, проходящий через место наблюдателя, принято называть истинным (географическим) меридианом наблюдателя 3. Основные линии и плоскости наблюдателя 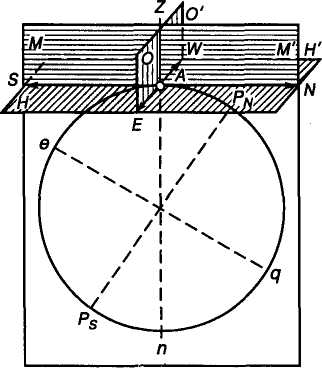 Рис. 2.2. Основные линии и плоскости наблюдателя Наблюдаемая человеком поверхность Земли воспринимается как плоская, поэтому для ориентирования на небольшом участке поверхности Земли пользуются определенными воображаемыми линиями и плоскостями. С помощью этих линий и плоскостей решаются многие навигационные задачи. Для ориентирования в любой точке поверхности Земли используются следующие линии и плоскости, связанные с местом наблюдателя. Вертикальная (отвесная) линия – прямая Zn, совпадающая с направлением силы тяжести в месте наблюдателя. Зенит наблюдателя – точка Z пересечения вертикальной линии с воображаемой небесной сферой над головой наблюдателя. Надир наблюдателя – точка n пересечения вертикальной линии с воображаемой небесной сферой под наблюдателем. Горизонтальная плоскость – любая плоскость, перпендикулярная отвесной линии. Плоскость истинного горизонта наблюдателя – горизонтальная плоскость HH’, проходящая через глаз наблюдателя. Вертикальная плоскость (плоскость вертикала) – любая плоскость, проходящая через отвесную линию. Плоскость истинного меридиана наблюдателя – вертикальная плоскость MM’, проходящая через полюсы Земли и место наблюдателя. Истинные (географические) меридианы – линии (окружности), образующиеся на поверхности эллипсоида при пересечении его плоскостями истинных меридианов. Меридиан наблюдателя – большой круг РNA РS, образованный сечением поверхности Земли плоскостью истинного меридиана наблюдателя. Линия истинного меридиана наблюдателя (полуденная линия) – линия NS пересечения плоскости истинного меридиана наблюдателя с плоскостью истинного горизонта наблюдателя. Начальный (нулевой, Гринвичский) меридиан . По Международному Соглашению с 1884 г. за начальный (нулевой) меридиан принят меридиан Гринвича – меридиан, проходивший через ось главного телескопа прежней Гринвичской обсерватории (существовала 278 лет 1675÷1953 гг.) в предместье г. Лондона (Англия). С 1953 г. новая Гринвичская обсерватория размещена в замке Херстмонсо (юг Англии в 15 км от побережья пролива Ла-Манш к востоку от нулевого меридиана на 20′25″). Нулевой (Гринвичский) меридиан делит земной шар на восточное и западное полушария. Главные направления. Пересечение плоскости истинного меридиана наблюдателя и плоскости первого вертикала с плоскостью истинного горизонта образует в плоскости истинного горизонта две взаимно перпендикулярные линии N – S и E – W. Линия N – S является полуденной линией. Она фиксирует направление на северный и южный географические полюсы. Линия E – W определяет направление восток – запад. Четыре взаимно перпендикулярных направления в плоскости истинного горизонта: N (норд), S (зюйд), E (ост - ист), W (вест) образуют главные направления. Относительно этих направлений и осуществляется ориентирование на поверхности Земли. Такая система линий и плоскостей называется горизонтной системой координат. 4. Системы координат, принятые в судовождении Координатами называют совокупность чисел, определяющих положение точки на линии, плоскости, поверхности или в пространстве. Чтобы определить положение точки на какой либо поверхности, необходимо знать не менее двух координат, отсчитанных от определенных координатных осей. В зависимости от избранной модели Земли и решаемых задач для определения положения точек на земной поверхности используют различные системы координат: географическая, геодезическая, астрономическая, полярная, прямоугольная. Географическая и геодезическая системы отнесены к земному эллипсоиду. Теперь становится ясно, что, для того, чтобы сориентировать наблюдателя на поверхности Земли, необходимо знать – на какой параллели и на каком меридиане в данное время находится этот наблюдатель, т.е. знать его географические координаты:
Географические координатыВ системе географических координат, координатными осями являются:
Координатами в географической системе координат являются:
Географическая широта – угол при центре Земли между плоскостью экватора и нормалью к поверхности земного эллипсоида в данной точке. Этот угол измеряется дугой меридиана от экватора до параллели данной точки. Географическую широту обозначают символом «φ» (фи) или «Ш». Счет широты ведется от экватора к северному (PN) или южному (PS) полюсам. Предел изменения широты от 0° до 90° (на экваторе φ = 0°, на полюсах φ = 90°). 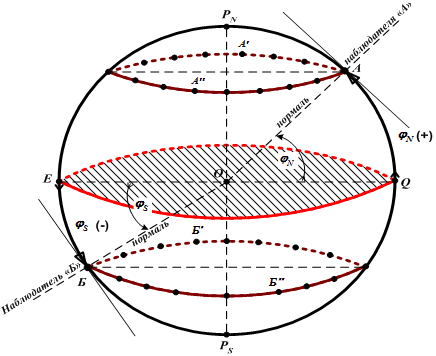 Рис. 2.3. Географическая широтаЕсли точка (т. А рис 2.3.) находится в северном полушарии, то широте дается наименование северная (нордовая) и обозначается буквой N (С); а при вычислениях северная или нордовая широта имеет знак «+». Если же точка (т. Б рис. 2.3.) находится в южном полушарии, то широте дается наименование южная (зюйдовая) и обозначается буквой S (Ю), а при вычислениях южная или зюйдовая широта имеет знак «–». Все точки, расположенные на одной параллели имеют одинаковую широту (φА = φА′ = φА″ и φБ = φБ′ = φБ″). 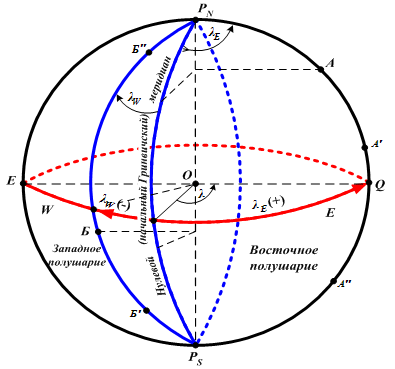 Рис. 2.4. Географическая долготаГеографическая долгота – двугранный угол между плоскостью Гринвичского (начального) меридиана и плоскостью меридиана данной точки. Этот двугранный угол измеряется сферическим углом при полюсе между указанными меридианами или же – географическая долгота измеряется меньшей дугой экватора от Гринвичского меридиана до меридиана данной точки. Географическую долготу обозначают буквой «λ» (лямбда) или «Д». Счет долгот ведется от нулевого (Гринвичского) меридиана к востоку (к исту) и западу (весту). Пределы изменения долготы от 0° до 180° (рис. 2.4). Если точка (т. А) находится в восточном (истовом) полушарии, то ее долготе дается наименование восточная (истовая) и обозначается буквой Е (ист), а при вычислениях ей приписывается знак «+». Если же точка (т. Б) находится в западном полушарии, то ее долготе дается наименование западная (вестовая) и обозначается буквой W (вест), а при вычислениях ей приписывается знак «–». Все точки, находящиеся на одной и той же половине меридиана имеют одну и ту же долготу (λА = λА′ = λА″ ; λБ = λБ′ = λБ″). Долготы точек, находящихся на противоположной стороне этого меридиана, отличаются от первых на 180°. Система географических координат является наиболее распространенной и применяется при различных вычислениях и практической деятельности. Координаты некоторых городов Санкт-Петербург → φ = 59°55′N λ = 30°23′E Киев → φ = 50°27′N λ = 30°30′E Одесса → φ = 46°28′N λ = 30°44′E Севастополь → φ = 44°37′N λ = 33°27′E Рио-де-Жанейро → φ = 22°54′S λ = 43°13′W Кроме географической системы координат применяются и другие:
Все системы координат взаимосвязаны между собой на основе математических зависимостей. Разности широт и долготГеографические координаты однозначно определяют положение точки на земной поверхности. Но при плавании судна в море, при переходе его из одной точки в другую происходит изменение координат его места. Величинами, характеризующими изменение географических координат при переходе судна от одной точки к другой, являются разность широт и разность долгот (рис.2.5.). 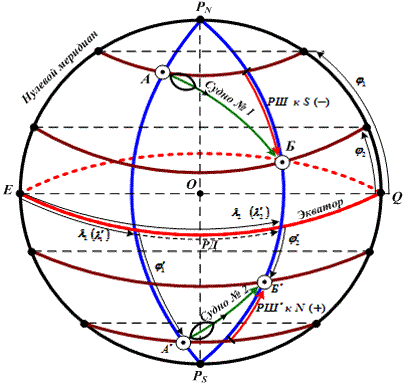 Рис.2.5. Разность широт и разность долготПункт (т. А или т. А′), откуда вышло судно, называется пунктом отхода. Пункт отхода характеризуется начальными координатами (φ1, λ1 или φ1′, λ1′). Пункт (т. Б или т. Б′), в который пришло судно, называется пунктом прихода. Пункт прихода характеризуется конечными координатами (φ2, λ2 или φ2′, λ2′). Тогда: – изменение широты (φ), при переходе судна из одного пункта в другой будет называться разностью широт и сокращенно обозначается как Δφ – основное обозначение или как РШ – запасное обозначение. Разность широт (Δφ) измеряется отрезком дуги (меньшей дуги) меридиана между параллелями пунктов отхода и прихода.
Если судно перемещается в направлении северного полюса PN (рис.2.5 судно № 2), то разности широт (Δφ) дается наименование «к северу» («к норду»), и обозначается – к N, а при вычислениях ей приписывается знак «+». Пример: φ1′ = 75°00,0′S, φ2′ = 25°00,0′S (судно № 2), тогда: РШ′ (Δφ′) = φ2′ − φ1′ = –25°00,0′ – (–75°00,0′) = +50°00,0′ или 50°00,0′ к N. Если же судно перемещается в направлении южного полюса PS (рис.2.5. судно № 1), то разности широт (Δφ) дается наименование «к югу» («к зюйду»), и обозначается – к S, а при вычислениях ей приписывается знак «–». Пример: φ1 = 70°00,0′N, φ2 = 45°00,0′N (судно № 1), тогда: РШ (Δφ) = φ2 − φ1 = 45°00,0′– (+70°00,0′) = –25°00,0′ или 25°00,0′ к S. Разность широт измеряется в пределах от 0° до ±180° (к N или к S). Разностью долгот называется изменение долготы (λ) при переходе судна из одного пункта в другой и сокращенно обозначается как Δλ – основное обозначение, или как РД – запасное обозначение. Разность долгот (Δλ) измеряется меньшей дугой экватора, заключенной между меридианами пунктов отхода и прихода.
Если судно перемещается к востоку (восточная долгота увеличивается, западная долгота уменьшается), то разности долгот дается наименование «к востоку» («к исту»), и обозначается – к Е, а при вычислениях ей приписывается знак «+». Пример: λ1 = 85°00,0′Е, λ2 = 130°00,0′Е (рис.2.5. оба судна), тогда: (РД) Δλ = λ2 − λ1 = 130°00,0′ – (+85°00,0′) = +45°00,0′ или 45°00,0′ к Е. Если же судно перемещается к западу (восточная долгота уменьшается, западная долгота увеличивается), то разности долгот дается наименование «к западу» («к весту»), и обозначается – к W, а при вычислениях ей приписывается знак «–». Пример: λ1 = 130°00,0′Е, λ2 = 85°00,0′Е (обратный переход судов 1, 2 из т. Б (т. Б′) в т. А (А′) рис.2.5). (РД) Δλ = λ2 − λ1 = 85°00,0′ – (+130°00,0′) = –45°00,0′ или 45°00,0′ к W. Разность долгот измеряется в пределах от 0° до 180° (к Е или к W). Если при вычислениях значение Δλ превышает 180°, то необходимо абсолютное значение полученного результата отнять от 360°, а наименование разности долгот (знак) изменить на противоположное.
Зная координаты исходной точки (φA, λA) и значения разности широт (Δφ) и разности долгот (Δλ), которые получились при переходе судна, – можно рассчитать координаты пункта прихода по формулам:
5. Локсодромия и ортодромия. Элементы дуги большого круга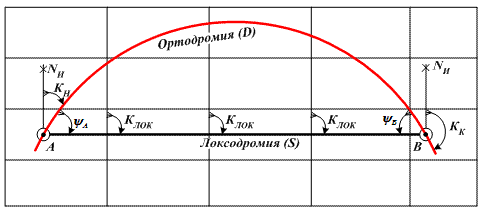 Рис. 2.6. Локсодромия и ортодромия на меркаторской путевой картеЛоксодромия – линия постоянного курса. На морской навигационной карте в проекции Меркатора – прямая линия, пересекающая меридианы под одним и тем же углом КЛОК = const (рис. 2.6.). На сфере:
Локсодромия в переводе с греческого означает «косой бег». Формула локсодромии для шара:
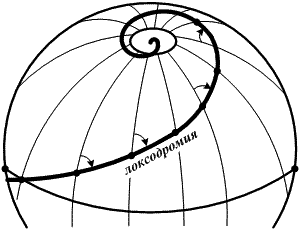 Рис. 2.7. Локсодромия на поверхности ЗемлиПри плавании судна на небольшие расстояния (сотни миль) и ведении графического счисления пути судна на карте в проекции Меркатора удобно выполнять это плавание по локсодромии – линии постоянного курса, несмотря на то, что это и не кратчайшее расстояние между двумя заданными точками. Ортодромия – дуга большого круга (ДБК) – кратчайшее расстояние между двумя точками на земной сфере – кривая, обращенная (на МНК в проекции Меркатора) выпуклостью к ближайшему полюсу (рис.2.6.). На картах в гномонической проекции – прямая линия.
Рассмотрим элементы дуги большого круга – ортодромии (рис. 2.8.): 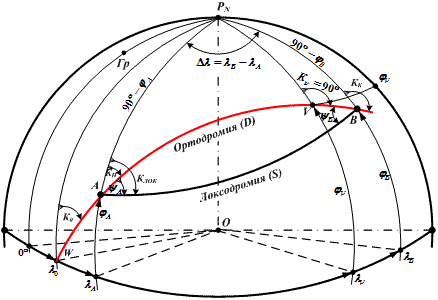 Рис. 2.8. Элементы дуги большого круга – ортодромииИсходная (начальная) точка ортодромии → т. А (φА λА или φ1 λ1). Начальный курс плавания по ортодромии → КН – горизонтальный угол между северной частью истинного меридиана в т. А и касательной к ортодромии в этой точке, совпадающей с носовой частью продольной оси судна. Отсчитывается от NИ по часовой стрелке от 0° до 360°. Конечная точка ортодромии → т. В (φВ λВ или φ2 λ2). Конечный курс плавания по ортодромии → КК – горизонтальный угол между северной частью истинного меридиана в т. В и касательной к ортодромии в этой точке, совпадающей с носовой частью продольной оси судна. Отсчитывается от NИ по часовой стрелке от 0° до 360°. Точка W → точка пересечения ортодромии и земного экватора (φ0 = 0°, λ0). Курс К0 → горизонтальный угол между северной частью истинного меридиана в т. W и касательной к ортодромии в этой точке, совпадающей с носовой частью продольной оси судна. Отсчитывается от NИ по часовой стрелке от 0° до 360°. Точка V (вертекс) → точка ортодромии, имеющая наибольшее значение широты (φV). Это точка «перегиба» ортодромии и курс судна в этой точке КV = 90° – при плавании судна в восточном направлении; или КV = 270° – если судно совершает плавание по ортодромии в западном направлении. 6. Единицы измерения расстояний и скорости, лаги. В судовождении в качестве основной единицы длины применяется морская миля (миля). В 1928 г. Международное гидрографическое бюро приняло международную стандартную морскую милю. 1 миля = 1852 м (Δ 1′м для φ = 45° = 1852,228 м). К этому решению присоединилось большинство стран. Принимая 1′ дуги меридиана за постоянную величину (1852 м) тем самым считаем Землю шаром с R = 3 437,747 мили = 6 366 707 м. Таким образом, морская миля - единица длины, равная длине одной минуты дуги меридиана земного эллипсоида. Стандартная морская миля – морская миля постоянной величины. Для измерения небольших расстояний служит 1 кабельтов (кб.), составляющий 0,1 стандартной морской мили.
При использовании некоторых карт, лоций, руководств для плавания и других пособий, особенно зарубежного издания, можно встретить и другие единицы длины: Статутная миля (Англия) = 8 фарлонгам = 5280 футов = 1609,34 м. Географическая миля = 1/15 длины дуги 1° экватора = 7 421,4 м ≈ 7 верст. Артиллерийский кабельтов = 182,88 м = 600 футам. Морская сажень = 1,83 м = 6 футам = 2 ярдам. Фут = 30,48 см = 12 дюймам = 1/3 ярда = 1/6 м. сажени. 1 ярд = 3 фута = 91,44 см. Единицы скорости, применяемые в судовожденииВследствие того, что основной единицей измерения расстояний на море является морская миля, скорость судна выражается числом миль, проходимых за 1 час. Единица скорости, равная одной миле в час, получила название – узел (уз.) 1 узел = 1 миля/час. Из истории происхождения названия «узел» – как единицы скорости: «В эпоху парусного флота скорость судна измерялась по длине выпущенного за борт на ходу судна лаглиня, прикрепленного к деревянному сектору. Измерение скорости производилось за 30 сек. (1/120 часа), поэтому и лаглинь разбивался на части, равные 1/120 части м.мили (≈ 15,43 м), которые отмечались вплетенными в лаглинь кончиками и узелками. Таким образом, длина «одного узла» должна была быть 6076,1 фут/120 = 50,63 фута = 15,43 м. Следовательно, сколько узлов лаглиня вытравлено за борт на ходу судна за 30 сек., столько миль в час и проходит судно». При решении отдельных задач судовождения удобно скорость судна выражать в кабельтовых в минуту (кб/мин).
Связь между различными единицами скорости дана в табл. 37 «МТ-75» (с. 308) или в табл. 5.6и «МТ-2000» (с. 427) 1 уз. = 1,852 км/час = 30,8667 м/мин = 0,5144 м/с = 1 миля/час. 1 км/час = 0,54 уз. = 16,6667 м/мин = 0,2778 м/с. 1 м/с = 3,6 км/час = 60 м/мин = 1,9438 уз. Лаги Для измерения скорости судна и пройденного им расстояния используются технические средства навигации (ТСН), которые называются лагами. В тех случаях, когда лаг по какой-либо причине не работает, а также для контроля за работой лага, скорость судна может быть определена по таблице соответствия скорости судна оборотам его винтов или рассчитана по показаниям суммарных счетчиков числа оборотов движителей. Лаги классифицируют по виду измеряемой скорости и по физическим принципам измерения скорости. Изучают лаги в дисциплине технические средства судовождения (ТСС). Лаги подразделяются на абсолютные и относительные, исходя из того, какую скорость судна они измеряют. Абсолютные лаги измеряют абсолютную скорость (относительно поверхности Земли (дна). Относительные лаги измеряют относительную скорость (относительно воды). Для осуществления безопасного мореплавания положение судна должно быть известно относительно поверхности Земли, т. е. нанесенных на МНК навигационных опасностей, ориентиров и т. п. Поэтому при счислении пути судна на карте необходимо прокладывать абсолютное перемещение суда. На большинстве судов устанавливают относительные лаги. Они определяют пройденное судном расстояние и скорость относительно воды, которая, в общем случае, сама движется относительно грунта. Перемещение судна с водными массами относительно грунта с помощью таких лагов измерить невозможно. В этом случае абсолютную скорость получают путем геометрического сложения векторов относительной и переносной скорости. Переносную скорость чаще всего выбирают из специальных навигационных пособий – таблиц течений в виде направления и скорости течения. Выводы Для решения навигационных задач физическую форму Земли представляют ее математическими моделями. Основными моделями Земли являются эллипсоид вращения (сфероид) и сфера (шар). При решении многих навигационных задач, не требующих повышенной точности, Землю принимают за шар определенного радиуса. Для ориентирования на поверхности Земли служат определенные условные точки, линии и плоскости. В судовождении принята географическая система координат. Большинство задач по определению места судна на земной поверхности учету его перемещения связано с определением направления кратчайшего расстояния между заданными точками. На поверхности земного эллипсоида это направление определяется геодезической линией, а на поверхности сферы – дугой большого круга, которая в навигации называется ортодромией. Ортодромия пересекает меридианы под различными углами. Если судно следует в неизменном относительно всех меридианов направлении, то траектория его пути изображает на сфере кривую линию, пересекающую меридианы под одинаковым углом. Линия, пересекающая меридианы под одинаковым углом, называется локсодромией. Локсодромия не является кратчайшим расстоянием между двумя точками, но плавание по ней значительно удобнее, так как осуществляется без изменения курса. На больших расстояниях, когда локсодромия значительно превышает по длине ортодромию, плавание осуществляется по отрезкам локсодромий, близких к дуге большого круга. Судно перемещается по водной поверхности, которая в свою очередь перемещается относительно дна морей и океанов. Поэтому движение судна – сложное движение. За абсолютную систему отсчета в морской навигации принята система, неподвижная относительно поверхности Земли (дна). Относительный лаг измеряет перемещение судна относительно воды. Под воздействием течения судно перемещается относительно дна (земной поверхности), а под воздействием ветра судно перемещается относительно воды. Лекция 3. |
