Содержание учебной дисциплины Основы судовождения
 Скачать 1.99 Mb. Скачать 1.99 Mb.
|

Тема: Сущность определения направлений в море и курсоуказателиПлан: Введение.
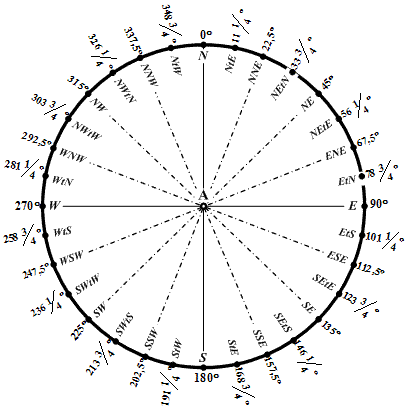
Выводы.ВведениеДля того чтобы переместить судно из одной точки в другую необходимо знать направление перемещения судна из исходной точки в конечную. При навигационном планировании перехода это направление судоводитель снимает с карты. Проведя на карте линию, соединяющую начальную и конечную точки перехода, судоводитель может измерить ее направление, а также оценить положение судна относительно навигационных опасностей в любой точке перехода. Для того, чтобы судно перемещалось по запланированной линии пути на нем установлены специальные приборы, с помощью которых определяется направление перемещения судна и с помощью которых рулевой удерживает судно на заданном направлении движения. Такие приборы или системы называются курсоуказателями. Основой для определения направлений движения судна и на окружающие судно объекты являются главные направления: N, S, E, W. Любое из этих главных направлений может быть принято за начало счета направлений. В судовождении традиционно за начало счета направлений принимают или северную или южную часть линии истинного меридиана (полуденной линии NS). Определение направлений относительно полуденной линии NS производится по различным системам счета в зависимости от характера решаемых навигационных задач с точностью до 0,10. 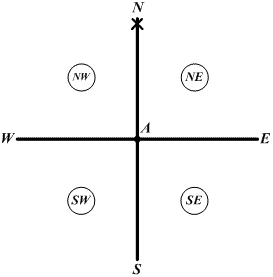 Рис. 3.1. Главные направленияГлавные направления делят плоскость истинного горизонта наблюдателя (ИГН) на 4 равные четверти: NE, SE, SW, NW. Любое направление на поверхности Земли может быть измерено наблюдателем углом в плоскости ИГН от линии N-S меридиана. 1. Системы счета направлений, принятые в судовождении.Круговая система счета направлений является основной системой счета. В этой системе горизонт делится на 360° (рис.3.2.) и счет направлений ведется от 0° до 360° от северной части истинного меридиана наблюдателя NИ вправо по ходу часовой стрелки. 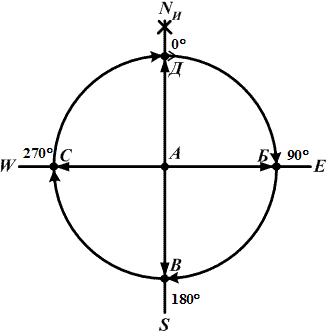 Рис. 3.2. Круговая система счета направленийНаблюдатель (т. А) – в центре. Тогда направления: на т. Б – 90°; на т. В – 180°; на т. С – 270°; на т. Д – 360° или 0°. Если при расчете направлений получится значение более 360° (390°), то от результата следует вычесть 360° (т.е. один оборот 390° – 360° = 30°). Круговая система счета направлений применяется в судовождении для определения направления движения судна (курс) и определения направления с судна на береговые ориентиры, соседние суда и пр. (пеленг). 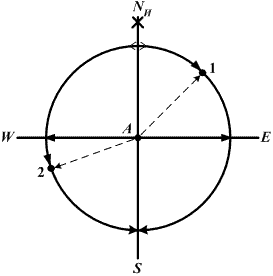 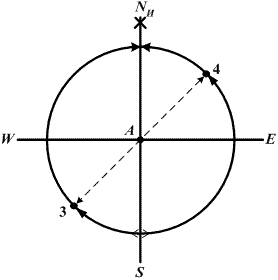 Рис. 3.3. Полукруговая система счета направленийВ полукруговой системе счета (рис.3.3.) счет направлений ведется от северной или южной части истинного меридиана наблюдателя в сторону востока Е или запада W в пределах от 0° до 180°. Для исключения многозначности в полукруговой системе счета числовому значению направления дается наименование. Например: т.1 N 45°E; т.2 N 105°W (рис. 3.3.). т.3 S 45°W; т.4 S 135°E (рис. 3.3.). Первая буква наименования – от какой части ИМН (N или S) идет счет. Вторая буква наименования – в каком направлении идет счет (к Е или к W). Полукруговая система счета обычно применяется в мореходной астрономии. Правила перехода от полукруговой системы счета направлений в круговую:
Четвертная система счета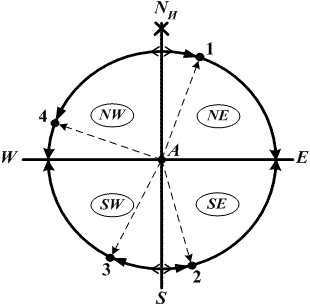 Рис. 3.4. Четвертая система счета направленийВ четвертной системе счета направлений (рис. 3.4) счет направлений ведется от северной (N) и южной (S) части ИМН в сторону востока (Е) и в сторону запада (W) в пределах от 0° до 90°. В данной системе счета числовому значению направления дается наименование, соответствующее наименованию четверти. Например: т.1 10°NE; т.2 10°SE; т.3 30°SW; т.4 70°NW. Четвертная система счета направлений также будет нам встречаться при решении задач мореходной астрономии. Переход от четвертной системы счета к круговой аналогичен изложенному в п. Б, т.е.:
Румбовая система счетаБыла основной системой счета направлений во времена парусного флота. Всего 32 румба-направления. 1 румб = 111/4° (111/4° · 32 = 360°). | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| NE четверть | SE четверть | ||||
| № румба | Обозначение румба | Число градусов | № румба | Обозначение румба | Число градусов |
| 0 | N | 0,00° | 8 | E | 90,00° |
| 1 | NtE | 11,25° | 9 | EtS | 101,25° |
| 2 | NNE | 22,50° | 10 | ESE | 112,50° |
| 3 | NEtN | 33,75° | 11 | SEtE | 123,75° |
| 4 | NE | 45,00° | 12 | SE | 135,00° |
| 5 | NEtE | 56,25° | 13 | SEtS | 146,25° |
| 6 | ENE | 67,50° | 14 | SSE | 157,50° |
| 7 | EtN | 78,75° | 15 | StE | 168,75° |
| 8 | E | 90,00° | 16 | S | 180,00° |
| SW четверть | NW четверть | ||||
| 16 | S | 180,00° | 24 | W | 270,00° |
| 17 | StW | 191,25° | 25 | WtN | 281,25° |
| 18 | SSW | 202,50° | 26 | WNW | 292,50° |
| 19 | SWtS | 213,75° | 27 | NWtW | 303,75° |
| 20 | SW | 225,00° | 28 | NW | 315,00° |
| 21 | SWtW | 236,25° | 29 | NWtN | 326,25° |
| 22 | WSW | 247,50° | 30 | NNW | 337,50° |
| 23 | WtS | 258,75° | 31 | NtW | 348,75° |
| 24 | W | 270,00° | 32 | N | 360,00° |
Главные румбы: N (0°), E (90°), S (180°), W (270°).
Четвертные румбы: NЕ (45°), SE (135°), SW (225°), NW (315°).
Вторые румбы: N NЕ (22,5°), S SE (157,5°), S SW (202,5°), N NW (337,5°).
Шестые румбы: E NЕ (67,5°), E SE (112,5°), W SW (247,5°), W NW (292,5°).
-
Нечетные румбы:
NtE (111/4°), NEtE (561/4°) и т.д. Подробно см. табл. 41 «МТ-75» с. 311 или табл. 5.13 «МТ-2000» с. 435 (табл.2.1).
Для обеспечения навигационной безопасности плавания судна в море необходимо уметь определять направление его движения относительно заданного пути, а также направления на навигационные опасности и видимые с судна ориентиры.
Если учитывать движение судна только под действием движителей, то направление его перемещения по водной поверхности совпадает с направлением его диаметральной плоскости, поэтому положения судна принято фиксировать углом, который составляет его диаметральная плоскость с плоскостью истинного меридиана.
Направления, определяемые относительно истинного меридиана и называются истинными направлениями.
Диаметральная плоскость судна (ДП) – условная вертикальная плоскость, делящая судно в продольном направлении на две равные части.
Диаметральная плоскость судна, плоскости меридианов и вертикалов, пересекаясь с плоскостью истинного горизонта, образуют прямые линии. Поэтому истинный курс, истинный пеленг, курсовой угол в плоскости истинного горизонта представляются плоскими углами.
Прямая линия, совпадающая с направлением диаметральной плоскости судна, называется линией курса, а совпадающая с направлением на ориентир – линией пеленга.
Истинный курс, истинный пеленг, курсовой угол
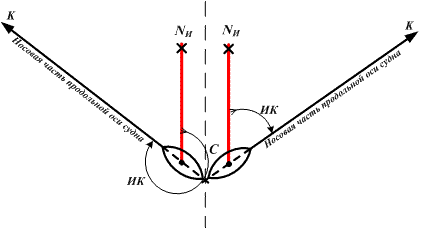
Рис. 3.6. Истинный курс судна
Направление движения судна характеризуется его истинным курсом.
Покажем это на рис. 3.6. для чего:
проведем северную часть истинного меридиана наблюдателя, находящегося на судне С → С-NИ;
продолжим носовую часть продольной оси симметрии судна → С-К, тогда:
– истинный курс судна есть ничто иное, как направление продольной оси судна, измеряемое горизонтальным углом между северной частью истинного меридиана и носовой частью продольной оси судна.
Истинный курс судна измеряется в круговой системе счета направлений от 0° до 360° (по часовой стрелке) и обозначается – как ИК.
Направление на объект наблюдения определяется или относительно носовой части продольной оси судна (курсовой угол), или относительно северной части истинного меридиана наблюдателя (истинный пеленг).
Истинным пеленгом называется горизонтальный угол в плоскости истинного горизонта наблюдателя между северной частью истинного меридиана наблюдателя и направлением из точки наблюдения на объект (рис. 3.7.).
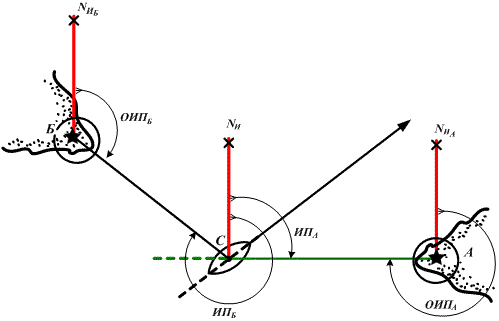
Рис. 3.7. Истинный пеленг на ориентир
Истинный пеленг, также как и истинный курс, измеряется в круговой системе счета направлений от 0° до 360° по часовой стрелке и обозначается как ИП.
Обратный истинный пеленг (ОИП) – это направление, отличающееся от истинного пеленга на 180°.
Если ИП на маяк 95°, то ОИП (с маяка на судно) 275° (рис. 3.7.).
| ОИП = ИП ± 180° |
Курсовым углом называется горизонтальный угол в плоскости истинного горизонта наблюдателя между носовой частью продольной оси судна (ДП судна) и направлением из точки наблюдения на объект (ориентир).
Курсовой угол измеряется в полукруговой системе счета направлений от 0° до 180° левого (л/б) и правого (пр/б) бортов (рис. 3.8).
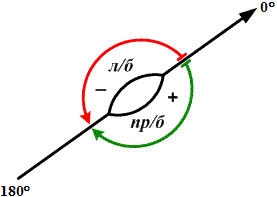
Рис. 3.8. Курсовой угол
Курсовой угол обозначается – как КУ или q.
При вычислениях курсовому углу правого борта (КУ пр/б) придается знак «+», а курсовому углу левого борта (КУ л/б) – знак «–».
Курсовые углы, равные 90° (90° пр/б, 90° л/б) получили название «траверзных» курсовых углов.
Курсовые углы, равные 45° (45° пр/б, 45° л/б) – «крамбола».
Курсовые углы, равные 135° (135° пр/б, 135° л/б) – «раковина» или «подзор».
Все истинные направления (ИК, ИП, КУ) связаны между собой соотношениями, которые легко установить из рис. 3.9.
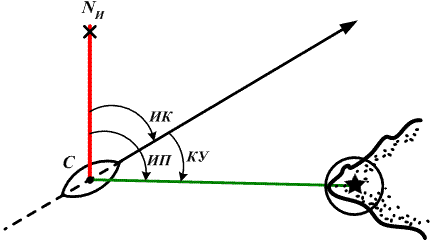
Рис. 3.9. Истинные направления
| ИП = ИК + КУ |
| ИК = ИП − КУ |
| КУ = ИП − ИК |
Формулы алгебраические.
При решении задач по данным формулам необходимо знать, что:
Если при вычислениях ИК или ИП получается результат более 360°, то из полученного результата необходимо вычесть 360°.
Например:
ИК = 270°, КУ = 130° пр/б, ИП = ?
ИП = ИК + КУ = 270° + 130° = 400° – 360° = 40°
Ответ:
ИП = 40°.
Если при вычислениях ИК или ИП получится отрицательный результат, необходимо к полученному результату прибавить 360°.
Например:
ИК = 40°, КУ = 70° л/б, ИП = ?
ИП = ИК + КУ = 40° + (–70°) = 40° – 70° = –30° + 360° = 330°
Ответ:
ИП = 330°.
Если при вычислениях значение курсового угла (КУ) получается более 180°, то необходимо полученный результат отнять от 360°, а наименование КУ изменить на противоположное.
-
Например:
ИП = 340°, ИК = 40°, КУ = ?
КУ = ИП – ИК = 340° – 40° = 300° пр/б, 360° – 300° = 60° л/б
Ответ:
КУ = 60° л/б.
3. Понятие о гирокомпасах, гирокомпасные направления, поправка
гирокомпаса, соотношение между направлениями
В соответствии с Международной Конвенцией по охране человеческой жизни на море все морские суда валовой вместимостью 500 per. т и более должны быть оборудованы гирокомпасом, определяющим направление ДП судна по отношению к географическому (истинному) меридиану.
Гироскопический компас (ГК) это электромеханический прибор с гироскопическим чувствительным элементом.
Принцип действия ГК основан на свойствах гироскопа сохранять направление в инерциальном пространстве при отсутствии внешних сил и изменять это направление под воздействием внешних сил.
Реальное устройство, которое отслеживает направление меридиана в ГК называется чувствительным элементом гирокомпаса. Основной прибор ГК состоит из чувствительного элемента (ЧЭ), системы подвеса ЧЭ, следящей системы и корректирующих устройств.
Под воздействием направляющей силы на чувствительный элемент, возникает момент сил, который стремится привести главную ось ЧЭ в плоскость меридиана. Таким образом, ось ЧЭ гирокомпаса показывает направление меридиана на судне.
Следящая система ГК передает информацию о направлении меридиана на указывающие приборы, которые называются репитеры. Репитеры устанавливают на мостике, штурманской рубке и в других помещениях судна. Для определения направления относительно меридиана на интересующие судоводителя объекты на крыльях мостика устанавливают репитеры ГК в кардановом подвесе. На репитер устанавливают специальное оптическое устройство – пеленгатор. Процесс измерения направления на ориентир называется пеленгованием. Рулевой ведет судно по показаниям репитера установленного на мостике (в рулевой рубке).
ГК позволяет определять направления с точностью до 1о, что удовлетворяет требованиям обеспечения безопасности плавания.
ГК - сложный измерительный прибор и требует специального электрического питания и квалифицированного обслуживания. На современных судах гирокомпасы являются основными курсоуказателями.
Компасные направления по гирокомпасу
Теоретически главная ось ЧЭ ГК должна устанавливаться в направлении истинного меридиана. На практике при работе гирокомпаса возникают погрешности в определении курса. Совокупность этих погрешностей образует суммарную погрешность гирокомпаса. Наличие суммарной погрешности приводит к тому, что главная ось чувствительного элемента ГК устанавливается в плоскости отклоненной от плоскости истинного меридиана на некоторый угол. Эта плоскость называется плоскостью гирокомпасного меридиана и относительно этой плоскости измеряются направления на судне. Угол, на который плоскость гирокомпасного меридиана отклонена от плоскости истинного меридиана называется поправкой гирокомпаса и обозначается ∆ГК.
Изобразим на плоскости истинного горизонта наблюдателя (рис.3.10. ) два меридиана — истинный Nии гироскопический NГК.
Если гирокомпасный меридиан отклонен от истинного к востоку (к Е), то поправка гирокомпаса считается положительной и при вычислениях ей придается знак «+».
Если гирокомпасный меридиан (NКГК) отклонен от истинного меридиана (NИ) к западу (к W), то поправка гирокомпаса считается отрицательной и при вычислениях ей придается знак «–».
Зависимость между гирокомпасными и истинными направлениями (рис. 3.10) выражается формулами:
| ИК = ККГК + ΔГК, ККГК = ИК − ΔГК |
| ИП = КПГК + ΔГК, КПГК = ИП − ΔГК |
(формулы алгебраические).
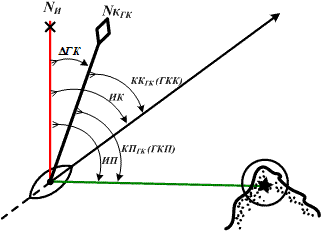
Рис. 3.10. Расчет истинных направлений по гирокомпасу
Примечание:
ГКК (ККГК) – гирокомпасный курс;
ГКП (КПГК) – гирокомпасный пеленг.
Понятие о магнитных компасах, компасные направления, поправка
магнитного компаса, соотношение между направлениями
Основой чувствительного элемента магнитного компаса является система магнитных стрелок. Чувствительным элементом магнитного компаса является картушка. Она состоит из системы магнитных стрелок, прикрепленных к поплавку и диска с делениями через 1°. Картушка помещена в котелок. Котелок представляет собой латунный резервуар в котором находится картушка компаса. Опорой для картушки служит латунная шпилька. Котелок заполнен компасной жидкостью. Сам котелок устанавливается в кардановом подвесе, позволяющем картушке компаса сохранять горизонтальное положение во время качки судна. Карданов подвес с котелком установлены в верхнем основании нактоуза. Нактоузпредназначен для установки в нем котелка с пеленгатором и устройств, компенсирующих влияние на ЧЭ магнитного и электромагнитного полей судна. Нактоузы судовых компасов изготовляются из специальных немагнитных сплавов. В корпусе нактоуза находится девиационный прибор.
Современные магнитные компасы имеют оптическую или электрическую дистанционную передачу показаний на репитеры.
Земля представляет собой огромный магнит и имеет свое магнитное поле, которое в каждой конкретной точке земной поверхности характеризуется направлением магнитных силовых линий и напряженностью магнитного поля.
Принято, что магнитные силовые линии направлены от южного магнитного полюса (SM) к северному (NM) и имеют вид замкнутых кривых.
Положение магнитных полюсов не совпадает с положением географических полюсов и меняется с течением времени, например:
На 1950 г. положение магнитных полюсов:
NM – (φ 72°N, λ 96°W) – р-н моря Баффина;
SM – (φ 70°S, λ 150°E) – р-н моря Д. Юрвиля.
В 1983 г. экспедиция на «Беллинсгаузене» уточнила положение РМS (φ = 65°10′S, λ = 138°40′E – море Д. Юрвиля – 03.02.83 г.)
Если мы проведем вертикальную плоскость через вектор напряженности магнитного поля перпендикулярно к плоскости истинного горизонта, то такая плоскость будет называться плоскостью магнитного меридиана, а пересечение этих плоскостей (пл. ИГН и пл. магнитного меридиана) даст нам линию магнитного меридиана (NM – SM).
Магнитное склонение. Магнитные направления
Так как магнитные полюсы не совпадают с географическими полюсами, то и направление истинного меридиана не совпадает с направлением магнитного меридиана на какой-то угол.
Угол в плоскости истинного горизонта наблюдателя между северной частью истинного и северной частью магнитного меридианов называется магнитным склонением и обозначается как d (рис. 3.11., 3.12.).
Магнитное склонение отсчитывается от NИ к востоку (Е) или западу (W) от 0° до 180°.
Если магнитный меридиан (NM) отклонен к востоку (к Е) от истинного меридиана (рис. 3.11), то магнитное склонение считается восточным и, при вычислениях, ему приписывается знак «+».
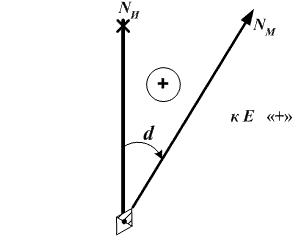 | 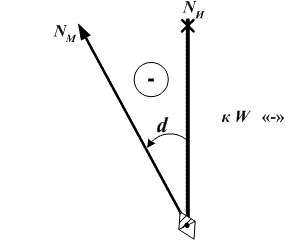 |
Рис. 3.11. Магнитное склонение (восточное) | Рис. 3.12. Магнитное склонение (западное) |
Если магнитный меридиан (NM) отклонен к западу (к W) от истинного меридиана (рис. 3.12), то магнитное склонение считается западным и, при вычислениях, ему приписывается знак «–».
Наблюдениями установлено, что магнитное поле Земли не остается постоянным. Изменение магнитного поля сопровождается изменением элементов земного магнетизма, а, значит и изменением магнитного склонения.
Величина изменения магнитного склонения за один год называется годовым изменением магнитного склонения и составляет, в среднем, от 0,0° до 0,2°.
Данные о магнитном склонении для целей судовождения (его величина, наименование, годовое изменение, к какому году оно приведено) приводятся на МНК (в ее заголовке и в «картушках» на участках карты).
Если магнитное склонение в различных точках карты разное, то данные о нем приводятся или в «картушках» истинных направлений или на меридианах карты.
Изогона – линия, соединяющая точки с одинаковым склонением.
Агона – линия, соединяющая точки с d = 0.
Магнитная аномалия – точка или район, где магнитное склонение резко отличается от окружающего. ( 1,2°W или магнитное склонение от 6,0°E до 7,0°W ).
Расчет значения магнитного склонения на день плавания производится по данным МНК (карты).
| Например: | Магнитное склонение 5,7°Е, приведено к 1990 г. Годовое уменьшение – 0,1° (дано в заголовке МНК). |
Для плавания в 2008 г. d2008 г. = +5,7° − (0,1° · 18 лет) = 5,7° − 1,8° = 3,9°E
Если на карте указано «годовое увеличение», то для нашего примера d2008 г. = 7,5°E
Примечание: Независимо от наименования магнитное склонение (d) увеличивается или уменьшается по своей абсолютной величине.
Магнитные направления – это направления, измеряемые относительно магнитного меридиана. К ним относятся:
магнитный курс (МК);
магнитный пеленг (МП) – (рис. 3.13).
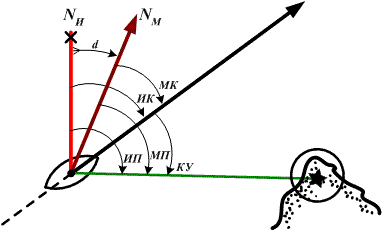
Рис. 3.13. Магнитные направления
Магнитный курс судна – направление продольной оси судна, измеряемое горизонтальным углом между северной частью магнитного меридиана и носовой частью продольной оси судна. Обозначается – МК.
Магнитный пеленг – горизонтальный угол между северной частью магнитного меридиана наблюдателя и направлением из точки наблюдения на объект. Обозначается – МП.
Магнитный курс (МК) и магнитный пеленг (МП) измеряются от NM по часовой стрелке от 0° до 360° (круговая система счета направлений).
Связь магнитных и истинных направлений осуществляется по формулам:
 |
Так на судне определяются истинные направления по магнитному компасу если бы он находился под воздействием только одного магнитного поля Земли.
Но на магнитный компас, установленный на судне, кроме магнитного поля Земли, будет воздействовать и общее магнитное поле судна, создаваемое судовым железом, намагниченным силой земного магнетизма, а также работой судовых электроустановок.
Следствием этого является то, что стрелка магнитного компаса отклонится и от направления магнитного меридиана и установится по направлению равнодействующей всех вышеуказанных сил (магнитного и электромагнитного полей судна).
Т.е. далее будем говорить уже не о магнитных, а о компасных направлениях и связывать их и с магнитными и с истинными направлениями.
Девиация магнитного компаса. Компасные направления.
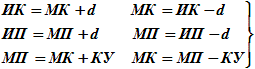
Плоскость компасного меридиана – вертикальная плоскость, проходящая через стрелку магнитного компаса, установленного на судне и перпендикулярная плоскости истинного горизонта наблюдателя.
Компасный меридиан (NК – SК) – линия пересечения плоскости компасного меридиана с плоскостью истинного горизонта наблюдателя.
Девиация магнитного компаса – угол в плоскости истинного горизонта наблюдателя между северными частями магнитного и компасного меридианов (обозначается символом – δ - дельта) рис. 3.14.
Рис. 3.14. Девиация магнитного компаса
Девиация магнитного компаса (δ) отсчитывается от северной части магнитного меридиана к Е или к W от 0° до 180°.
При вычислениях восточную (Е) девиацию принято считать положительной («+»), а западную (W) – отрицательной («–»).
Девиация магнитного компаса (δ) зависит от многих причин:
района плавания; курса судна; состояния корпуса судна; работы электромеханизмов и др.
Направления, измеряемые относительно компасного меридиана называют компасными направлениями. К ним относятся: – компасный курс, компасный пеленг (рис. 3.15).
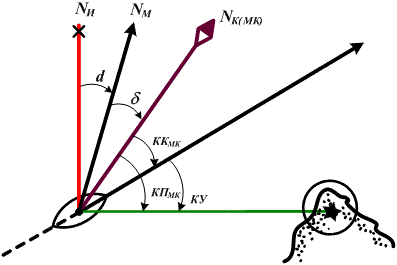
Рис. 3.15. Компасные (по магнитному компасу) направления
Компасный курс (по магнитному компасу) – направление продольной оси судна, измеряемое горизонтальным углом между северной частью компасного меридиана магнитного компаса и носовой частью продольной оси судна. Обозначается – ККМК.
Компасный пеленг (по магнитному компасу) – горизонтальный угол между северной частью компасного (по магнитному компасу) меридиана наблюдателя и направлением из точки наблюдения на объект. Обозначается – КПМК.
Компасные направления по магнитному компасу (ККМК и КПМК) измеряются от северной части компасного меридиана магнитного компаса по часовой стрелке от 0° до 360° (круговая система счета направлений). Зависимость между компасными направлениями магнитного компаса и его магнитными направлениями определяется формулами:
 |
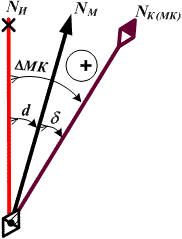 |  |
Рис. 3.16. Поправка магнитного компаса (положительная) | Рис. 3.17. Поправка магнитного компаса (отрицательная) |
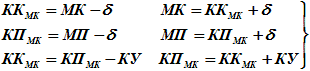
Для перехода от компасных направлений по магнитному компасу к истинным направлениям и обратно служит общая поправка магнитного компаса (рис. 3.16, 3.17).
| ΔМК = d + δ |
| где | d – склонение, выбранное с МНК (карты) и приведенное к году плавания; |
| | δ – девиация, выбираемая из РТШ по значению ККМК (из таблицы девиации магнитного компаса). |
Поправка магнитного компаса – это горизонтальный угол в плоскости истинного горизонта наблюдателя между северной частью истинного и северной частью компасного (по магнитному компасу) меридианов.
Обозначается как ΔМК. Пределы ее измерения (изменения) от 0° до 180°.
Если компасный меридиан магнитного компаса (NKмк) отклонен к востоку (к Е) от истинного меридиана (NИ), то поправка магнитного компаса (ΔМК) считается положительной (рис. 3.16) и при вычислениях ей придается знак «+».
Если компасный меридиан магнитного компаса (NKмк) отклонен к западу (к W) от истинного меридиана (NИ), то поправка магнитного компаса (ΔМК) считается отрицательной (рис. 3.17) и при вычислениях ей придается знак «–».
-
Например:
1.
d = +4,5°Е; δ = +4,0°; ΔМК = ?
ΔМК = d + δ = +4,5° + (+4,0°) = +8,5° (рис. 3.9).
2.
d = +4,5°Е; δ = –9,5°; ΔМК = ?
ΔМК = d + δ = +4,5° + (–9,5°) = –5,0° (рис. 3.10).
Теперь ясно, что для перехода от компасных направлений по магнитному компасу (снимаемые с прибора значения ККМК или КПМК) к истинным направлениям, которые будем проводить на карте – нам нужно знать значение поправки магнитного компаса (ΔМК).
Магнитное склонение (d) меняется со временем и с изменением координат судна, но его значение на заданный момент (год плавания) и для данного района плавания можно всегда рассчитать по данным морской навигационной карты.
Девиация же магнитного компаса (δ) изменяется не только при изменении координат места, но и с изменением курса судна, от вида и размеров груза, от положения грузовых, поворотных и выдвижных устройств судна и других причин.
Значит определение поправки магнитного компаса – это определение его δ. Значение девиации не должно быть большим.
Таблица девиации составляется для значений компасных курсов через каждые 10°.
Перевод и исправление румбов
При расчете истинных направлений по магнитному компасу следует учитывать условия использования этого курсоуказателя.
Если магнитный компас находится на судне и подвержен влиянию его полей, то ΔМК = d + δ, тогда (рис. 3.18):
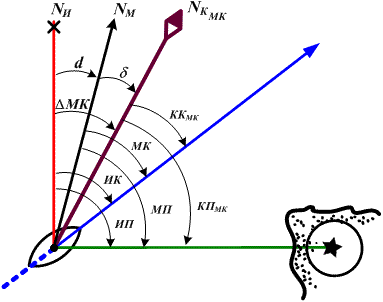
Рис. 3.18. Расчет истинных направлений по магнитному компасу
| |
Переход от компасных направлений к истинным (или от компасных к магнитным) получил название – исправление румбов.
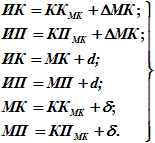 |
Переход от одних направлений (магнитных или истинных) к другим (компасным) получил название – перевод румбов.
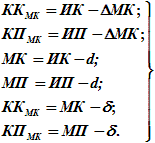 |
Выводы
Направления на судне определяются относительно истинного меридиана или диаметральной плоскости судна.
Направления, определяемые относительно истинного меридиана, называются истинными направлениями.
Для определения направления географического (истинного) меридиана на судах используют технические средства навигации (ТСН), называемые курсоуказателями.
Плоскость, в которой устанавливается главная ось ЧЭ ГК называется плоскостью гирокомпасного меридиана. Относительно этой плоскости измеряются направления на судне. Угол, на который плоскость гирокомпасного меридиана отклонена от плоскости истинного меридиана называется поправкой гирокомпаса и обозначается ∆ГК.
Направления, измеренные относительно магнитного меридиана, называются магнитными направлениями. Угол между истинным и магнитным меридианами называется магнитным склонением.
Угол между магнитным и компасным меридианами называется девиацией магнитного компаса.
Поправка магнитного компаса служит для перехода от компасных направлений к истинным направлениям:
Магнитный компас автономен и практически безотказен в работе. Однако и он имеет ряд недостатков: его показания необходимо всегда исправлять склонением и девиацией, величины и знаки которых меняются в зависимости от курса судна и его географического положения.
В судовождении применяются несколько систем счета направлений. Наиболее распространенными из них являются: круговая система счета; полукруговая система счета; четвертная система счета.
В навигации круговая система счета направлений является основной и применяется для определения направления движения судна, а также направлений на видимые с судна предметы.
Лекция 4.