Волков Строительные машины. Среднее профессиональное образование
 Скачать 5.2 Mb. Скачать 5.2 Mb.
|

|
Глава 4. ТРАНСМИССИИ И СИСТЕМЫ УПРАВЛЕНИЯ 4.1. Общие сведения о трансмиссиях Трансмиссиями называют устройства для передачи движения от силовой установки нескольким потребителям энергии — рабочим органам и движителям ходовых устройств машин. Механические трансмиссии состоят из передач — механизмов для передачи непрерывного вращательного или поступательного движения, а также для преобразования одной формы движения в другую (вращательного в поступательное и наоборот). При единственном потребителе передача превращается в трансмиссию. Иногда понятия передачи и трансмиссии отождествляют, распространяя этот термин также на все другие (немеханические) виды трансмиссий. Движение от силовой установки (двигателя) может передаваться рабочему органу передачей (трансмиссией) непосредственно, как, например, в ручной электросверлильной машине (см. подразд. 26.2), или через исполнительные механизмы, как, например, у одноковшового экскаватора (см. подразд. 21.14) — машины цикличного действия, исполнительными механизмами которого являются механизмы привода стрелы, рукояти, ковша, поворотной платформы и ходового устройства. Каждый исполнительный механизм обеспечивает простое движение рабочего органа. Складываясь в определенных сочетаниях на различных стадиях рабочего цикла (операциях), простые движения (кроме движения хода) образуют сложное движение рабочего органа — ковша. Другим примером разветвленной трансмиссии может служить привод рабочих органов траншейного роторного экскаватора (см. подразд. 15.5) — машины непрерывного действия. В рабочем режиме его землеройному рабочему органу — ротору сообщается сложное движение, состоящее из двух простых движений: вращения относительно собственной оси, передаваемого через привод ротора (относительное движение), и поступательного движения за тягачом, передаваемого через привод ходового устройства (переносное движение). Кроме того, отдельной ветвью трансмиссии движение передается по замкнутому контуру ленте отвального конвейера для перемещения разгруженного из ковшей ротора грунта в сторону от траншеи. Передача характеризуется входными (на ведущем звене, приводимым двигателем или предшествующей передачей), выходны ми (на ведомом звене) и внутренними параметрами (рис. 4.1). Для двух первых это форма движения (вращательное или поступательное), его скорости (линейные vx и г>2 или угловые со( и <м2), в общем случае являющиеся векторными величинами,и силовые факторы (усилия f, и F2 - при поступательном или крутящие моменты Т\ и Т2 — при вращательном движении). Подстрочными индексами обозначены соответственно входные и выходные параметры. Обобщенными характеристиками являются мощности, измеряемые в ваттах и определяемые как: Р\ = FxvuР2 = F2v2 или Рх = 7>,; Р2 = Т2щ. (4.1) Внутренними параметрами служат: передаточное отношение /, определяемое как отношение (по модулю) скорости входного звена к скорости выходного звена, и коэффициент полезного действия т). Большинство механических передач преобразует вращательное движение на входе во вращательное же движение на выходе. Для них /' = ш,/со2 = щ/п2, (4.2) где пхмп2 — частоты вращения соответственно на входе и на выходе. Реже применяют передачи с поступательной формой движения обоих звеньев, для которых /= vjv2. Во всех случаях при одинаковых формах движения на входе и выходе безразмерное передаточное отношение показывает, во сколько раз уменьшается скорость (угловая или линейная) ведомого звена передачи по сравнению с теми же параметрами ее ведущего звена. Смешанные формы движения — поступательное на входе и вращательное на выходе и наоборот — характерны, например, для рычажных механизмов. Они рассматриваются в специальной литературе. Коэффициент полезного действия есть отношение Л = Рг/Ри (4-3) которое всегда меньше единицы. Этот параметр показывает, какая часть затраченной энергии (Рх) используется полезно (Р2). Разница ДР- Рх- Р2 составляет потери энергии внутри передачи, природа которых будет раскрыта ниже при рассмотрении отдельных видов передач (трансмиссий).
Рис. 4.1. Структурная схема параметров передачи Зависимость между входными и выходными силовыми факторами при однородной форме движения, например, вращательном можно определить после подстановки двух последних зависи мостей из (4.1) в отношение (4.3) с использованием (4.2). В этом случае получим _ Т2(х>2 _ ]т_ 7] со, T\i 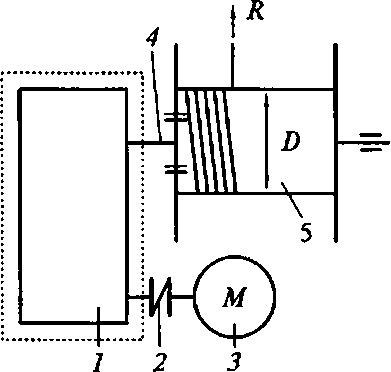 Рис. 4.2. Кинематическая схема однобарабанной лебедки: 1 — редуктор; 2 — соединительная муфта; 3 — электродвигатель; 4 — ведомый вал редуктора; 5 — барабан Т2= Г,/л- (4.4) Проделав те же операции с параметрами поступательного движения, найдем F2= Fiir]. Из этого следует, что при любых одинаковых формах движения ведущего и ведомого звеньев передачи выходной силовой фактор (крутящий момент или усилие на ведомом звене) равен произведению входного (на ведомом звене) силового фактора, передаточного отношения и КПД передачи. В трансмиссии из п последовательно соединенных передач с однородной формой движения входное звено любой промежуточной передачи является выходным звеном предшествующей передачи, а ее выходное звено входным для последующей передачи, так что общее передаточное число и КПД трансмиссии определяются произведениями соответствующих величин для составляющих трансмиссию передач: /= /,/2.../л; л = тцЛг-Лп- откуда Следует усвоить, что усилие или крутящий момент на ведомом звене трансмиссии зависят от внешнего сопротивления, а те же силовые характеристики ведущего звена, кроме того, от внутренних параметров трансмиссии (передаточного отношения и КПД). Для функционирования, например, трансмиссии для передачи вращательного движения необходимо, чтобы момент на ведущем звене, соответствующий внешнему сопротивлению, не Превышал бы допустимого активного момента привода. Рассмотрим это на примере передачи привода барабанной лебедки (рис. 4.2), который имеет следующие параметры: усилие натяжения ветви каната, навиваемого на барабан R = 38,5 кН; диаметр барабана по слою навивки каната D = 430 мм; максимальный момент, который может реализовать электродвигатель (на ведущем валу передачи) Гтах = 3,2 кН м; передаточное отношение редуктора (механической передачи) / = 8,32; КПД редуктора (rip) и барабана (потери энергии на трение в подшипниках барабанного вала, при взаимодействии каната в процессе его навивки на барабан с нарезными канавками — г)б) лР = Лб = 0,97. Передача (редуктор 1) на рис. 4.2 выделена пунктирной линией. Момент внешних сил на барабане от усилия в канате Т6 = RD/2 = 38,5-0,43/2 = 8,278 кН-м. С учетом потерь на трение в барабане приведенный к ведомому валу 4 редуктора момент сил внешнего сопротивления составит: Т2 = Г6/т1б = 8,278/0,97 = 8,534 кН-м. Требуемый для его преодоления момент активных сил на ведущем валу: 7]= trip 8,32-0,97 что меньше допускаемого электродвигателем максимального момента Гтах= 3,2 кН-м. Следовательно, передача с представленными выше параметрами способна к функционированию. Скоростные параметры обычно задаются приводным двигателем (на ведущем звене передачи). В ряде случаев скорость является функцией реализуемого двигателем крутящего момента. Дальнейшее изложение трансмиссий строительных машин обусловлено особенностями их структуры и содержания, в связи с чем ниже будут рассмотрены только виды механических передач. Все другие виды трансмиссий (электрические, гидравлические, пневматические) целесообразно рассматривать совместно с системами управления в составе соответствующих приводов. По конструктивному исполнению элементов передач, участвующих в преобразовании параметров движения, различают фрикционные, ременные, зубчатые, червячные, цепные и канатные передачи. В передачах первых двух видов движение от ведущего к ведомому звену передается за счет сил трения на контактных поверхностях сцепляющихся друг с другом ведущего и ведомого звеньев. Эти передачи относятся к передачам движения трением. В зубчатых, червячных и цепных передачах движение передается за счет силового воздействия зацепляющихся друг с другом элементов ведущего звена на элементы ведомого. Эта передачи составляют группу передач движения зацеплением. Канатные передачи образуют особую группу для передачи движения закрепленным на ведущем звене канатом. Они будут рассмотрены отдельно при изучении устройства и принципа работы полиспастов (см. подразд. 11.3). Из-за нали чия в ременных, цепных и канатных передачах гибких связей — соответственно ремней, приводных цепей и канатов их называют передачами с гибкой связью. Функциональные связи элементов механических передач обычно представляют кинематическими схемами. На кинематических схемах конкретных моделей машин указывают скорости (линейные или угловые) движения составных элементов трансмиссии, а также формирующие их параметры, например, числа зубьев зубчатых колес. Во всех других случаях эти данные опускают. 4.2. Фрикционные передачи Во фрикционных передачах (рис. 4.3) ведущее и ведомое звенья — цилиндрические или конические катки жестко посажены на вращающиеся в подшипниках валы и прижаты друг к другу. При вращении ведущего катка, приводимого двигателем или предшествующей передачей, ведомому катку сообщается вращение за счет возникающих на контактной поверхности сил трения. Линейная скорость ведомого катка vj в зоне контакта из-за упругого проскальзывания отстает от линейной скорости ведущего катка v{: vi = (4.5) где £ — коэффициент, учитывающий указанное выше отставание, называемое упругим проскальзыванием-, для передач, работающих без смазки, С, = 0,990...0,995. 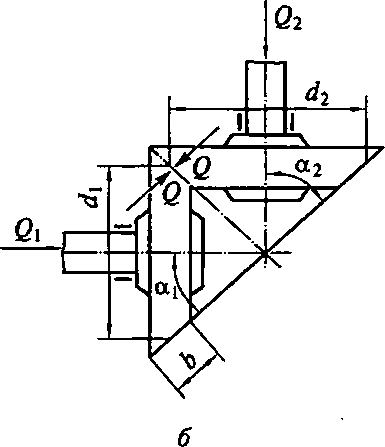 Как и ранее, подстрочными индексами здесь и далее обозначены величины относящиеся соответственно к ведущему (входному) и ведомому (выходному) звеньям передачи. 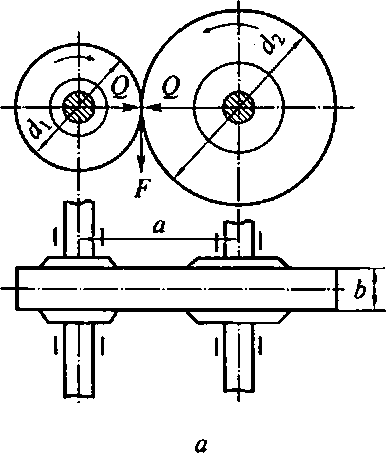 Рис. 4.3. Фрикционные передачи с цилиндрическими (а) и коническими (б) катками Между окружной v и угловой ю скоростями, а также диаметром катка d существует зависимость: v= dtо/2. Выражая эти символы подстрочными индексами соответственно их принадлежности к звеньям передачи, из соотношения (4.5) получим d2iо2 = L,dxa>u откуда /=e»,/®2=rf2/(rfI0. (4-6) Окружное усилие на ведущем катке F = 2T^x/db где Тх — крутящий момент на валу катка, Нм; ri t — КПД подшипников ведущего вала; dx — диаметр ведущего катка, в случае конических катков измеренный по срединной окружности конуса, м. Этим усилием создается крутящий момент на ведомом валу Т2=Fd2T\2/2, где d2— диаметр ведомого катка; -п2 — КПД подшипников ведомого вала. Исключая из двух последних выражений параметр Fu учитывая отношение (4.6), найдем зависимость между моментами Г, и Т2: Т2 ^/тьПгС- Сравнивая эту зависимость с зависимостью (4.4), получим Т1 = Л1Л2С, (4.7) что согласуется с общим определением КПД, учитывающим внутренние потери энергии при передаче движения, включая упругое проскальзывание по контактным поверхностям. В среднем ri = = 0,90...0,95. Функционирование фрикционной передачи определяется условием F< Fnpea. Предельное значение силы трения на контактирующих поверхностях, выражаемое в ньютонах: F^ = fQ, (4.8) где / — коэффициент трения, зависящий от материала трущихся пар, их смазки и других факторов, ориентировочно для трения стали по стали или чугуну со смазкой и без нее соответственно/= = 0,04 — 0,05 и / = 0,10...0,15; стали или чугуна по текстолиту всухую/= 0,2... 0,3; Q — нормальное усилие на контактной поверхности, Н. Невыполнение указанного выше условия приводит к проскальзыванию (буксованию) ведущего катка относительно ведомого без вращения последнего. Передаточное отношение конической фрикционной передачи выражается формулой / = sina2/(£sin a,), которая получается из формулы (4.6) и геометрических соотношений (рис. 4.3, б). В случае перпендикулярных осей вращения ведущего и ведомого катков: / = cos а, / (С sin a,). В двух последних формулах через ai и Ог обозначены половины углов при вершинах конусов соответственно ведущего и ведомого катков. Рассмотренные фрикционные передачи просты по форме рабочих поверхностей катков, но, из-за необходимости создания больших контактных усилий, нуждаются в специальных прижимных устройствах. Поэтому их валы и подшипники испытывают повышенные нагрузки, а тела качения подвержены износу, особенно при буксовании. Этих недостатков лишены передачи с клинчатыми катками, рабочие поверхности одного из которых своими клиновыми выступами входят в канавки такой же формы другого (рис. 4.4). Нормальная сила давления на одной стороне каждой канавки, вызванная силой прижатияQ одного катка к другому, составит Q' = Q/ (2z sin (а/2)), а суммарная сила давления по всем z канавкам Ql= Q'-2z= <3/sin (a/2), гдеz— число канавок; a — угол развала канавок. Для получения большего значенияQ' и, следовательно,Q\ угол а должен быть по возможности малым. Во избежание заклинивания сопрягаемых катков его ограничивают значением a = 15°. Заменяя в формуле (4.8)Q наQ\ и обозначая коэффициент пропорциональности /пр=// sin (а/2), (4.9) для предельной силы трения на рабочих поверхностях клинчатой фрикционной передачи получим 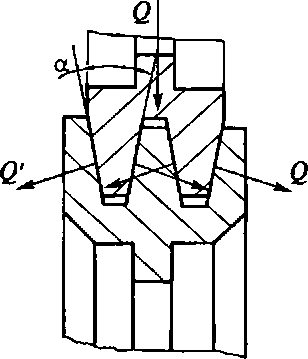 Рис. 4.4. Схема разложения силы прижатия клинчатых катков по рабочим поверхностям ^пред. кл |