строи машины. 1.строит.машины в современном строит.пр-ве. Строительство отрасль материального производства, обеспечивающая получение строительной продукции в результате реализации комплекса производственных процессов строительномонтажных работ (смр), выполняемых непосредственно на строительной площадке.
 Скачать 3.29 Mb. Скачать 3.29 Mb.
|

|
1.3. Структурно-функциональное устройство
В первой группе машины (транспорт, грузоподъемные машины и машины непрерывного транспорта) рабочий процесс состоит в перемещении грузов без их внутреннего преобразования. Вторая группа – группа машин технологического назначения, связанная в первую очередь с внутренним преобразованием объекта воздействия(среды обработки), при котором он может менять форму и свойства. В состав рабочего(технологического) процесса могут входить одна или несколько операций. В последнем случае среди них может быть выделена главная, определяющая в первую очередь форму, размеры рабочего органа и характер его движения и взаимодействия с обрабатываемым объектом. Машины этой группы могут реализовывать и транспортные операции в ограниченных пределах.
Двигатель, как непосредственный преобразователь электрической энергии источника питания в механическую (обозначен Д), представляет силовую часть привода. Выходными характеристиками двигателей являются зависимость свободной (эффективной) механической мощности, реализуемой на его выходе от скорости движения выходной детали. Для двигателей вращательного типа, составляющих подавляющее большинство, указанная зависимость выражается функцией Ne (ω) или Ne (n), где ω - угловая частота вращения вала, рад/с, n – число оборотов вала, об/мин (рис. 1.3). 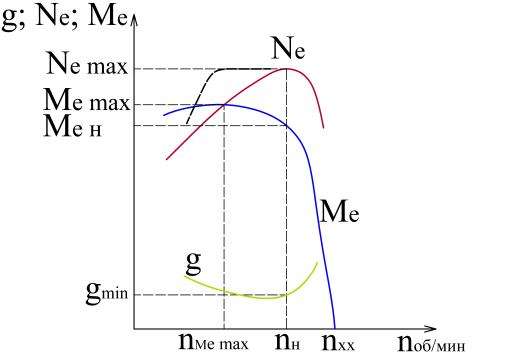 Рис. 1.3. Эксплуатационные характеристикики ДВС Мощностные характеристики Ne (ω) являются результатом процессов преобразования энергии, получаемой двигателем от источника энергии, с учётом её общих потерь, имеющих место как в процессе внутреннего преобразования энергии (обозначают их индексом «i»), так и при механической передаче их валу (обозначают их индексом «м»). Для оценки потерь мощности используют понятие коэффициента полезного действия КПД, обозначая его η = ηi · ηм. КПД есть отношение мощности на выходе того или иного элемента к мощности на его входе. Помимо мощностной характеристики, важное значение для двигателей представляет внешняя механическая характеристика (ВМХ) – зависимость вращающего момента на его валу от частоты его вращения: М(ω) или М(n), являющейся механической реакцией двигателя на значение внешней нагрузки на его валу. Ориентировочную оценку ВМХ двигателей проводят по двум параметрам, путем их сравнения с требуемыми значениями. Этими параметрами являются: коэффициент жесткости: β=d M/d n, коэффициент перегрузки: kn= Mmax/Мном, где Mmax – максимальное возможное значение вращающего момента, допускаемого двигателем, Мном – номинального значение вращающего момента, соответствующей номинальному числу оборотов стационарного режима работы (рабочего диапазона). Требуемые значения указанных параметров получают опытным путем для различных групп СМ. Значение мощности, реализуемое двигателем в рабочем диапазоне частот составит:  Величина затраченной энергии за период Т будет равна:  По отношению к первичным двигателям, особенно в совокупности их с преобразующими устройствами трансмиссии – генератором, (электро, пневмо) или гидромуфтой, гидротрансформатором, используется понятие силовой установки. Она рассматривается как энергетическая часть привода, приводящая в движение механизмы трансмиссии.
Состав трансмиссии определяется формой передаваемого энергопотока (механическая, электрическая, гидравлическая, пневматическая, комбинированная). Механические трансмиссии представляют собой систему механических устройств – механизмов, обеспечивающих передачу энергопотока от первичного двигателя деталям рабочего и ходового оборудования без преобразования формы энергопотока. Исполнительными устройствами механической трансмиссии являются её конечные механизмы. Наиболее часто это канатно-блочные, цепные, зубчато – реечные, механизмы лебёдок или редукторного привода, вибрационные и виброударные механизмы.
Характеристики генераторных установок определяются видом вырабатываемого ими энергоносителя. Для гидравлических и пневматических генераторных установок ими являются зависимости расхода энергоносителя на выходе от давления нагнетания при постоянной частоте вращения вала. Характеристиками электрогенераторных установок являются зависимости напряжения от тока якоря. Другими составляющими трансмиссий являются: • трубопроводы или проводники, предназначенные для движения преобразованного энергопотока; • распределительное устройство, обеспечивающее требуемое направление движения энергопотока к исполнительному устройству; • исполнительное устройство - вторичный двигатель, обеспечивающий обратное преобразование энергопотока в трансмиссии в механическое движение, требуемое для приведения в действие деталей рабочего и ходового оборудования Система управления обеспечивает управляемую передачу энергопотока деталям рабочего и ходового оборудования.
Основными характеристиками системы управления является показатели устойчивости её функционирования (коэффициент запаса устойчивости) и качества (точности управления и быстродействия). Система управления включает: • устройство управления производящее формирование и выдачу управляющих воздействий в силовые цепи привода • пульт управления обеспечивающий ввод задания в виде программы или отдельных команд оператора • алгоритм управления определяющий последовательность реализации программы управления Классификация систем управления: • по степени участия оператора (ручные; системы автоматического управления (регулирования): САУ-САР; автоматизированные систему управления: АСУ); • по расположению пульта управления (со встроенным и выносным «дистанционные» пультом управления) • по назначению (рабочим и ходовым оборудование; первичными силовыми установками; распределение мощных потоков; защиты, контроля, диагностирования технических параметров); • по виду решаемых задач (стабилизирующие; программные; оптимизирующие) Программные САУ решают задачи управления для случая представления задающего воздействия g(t) в виде наперед заданной программы. (Частным случаям этой программы g(t)=const, являются стабилизирующими САУ.)
Существует два различных способа адаптации с идентификацией и принятием оптимального решения и с эталонной моделью. Оптимальные САУ, является частные случаи адаптивных. Они отыскивают наилучшие (оптимальные) режимы управления в соответствии с наперед заданными критериями. Для этого в их состав вводят блок нахождения экстремальных значений и микропроцессор.
Верхний уровень управления производит логический анализ объема информации о ходе выполнения цикла, дополнительных условиях и ограничениях, имеющих место при его реализации и принимает решение о переходе от одной операции к другой, путем включения необходимых цепей привода. В зависимости от сложности СМ и технологического цикла для реализации алгоритмов верхнего уровня используют управляющие микропроцессоры, перепрограммируемые электронные командоаппараты или контроллеры. Совокупность первчиной силовой установки (двигателя), трансмиссии и систем упраления называют приводом машины.
В качестве движителей наиболее широко используются рельсовые и пневматические колеса, гусеницы. Кроме движителя, в состав ходового оборудования входят подвеска – устройство для соединения их с рамой машины и исполнительные устройства, обеспечивающие непосредственную передачу движения на ведущие движители.Машины, оснащённые приводом хода, называют самоходными. Упруго-демпфирующие подвески, используемые в них, обеспечивают возможность реализации высоких скоростей движения (до 60 - 80 км/ч, при требуемой плавности хода). Часть машин, не имеющих привода хода, называют передвижными. Основными характеристиками ходового оборудования являются: тягово-скоростная в диапазоне возможных скоростей передвижения, величины удельных давлений на основание, общий коэффициент сцепления движителя с основанием, общий коэффициент сопротивления передвижению
Рабочее оборудование предназначено для реализации энергии привода, на выполнение рабочего процесса. Рабочее оборудование по технологическому назначению разделяют на группы по аналогии с классификацией СМ: грузоподъемное, погрузочное - разгрузочное, землеройное, уплотняющее, дробильное, сортировочное, отбойки и бурения и другое.
Динамические режимы более интенсивны и в ряде технологических операций находят более широкое применение. Среди указанных режимов наиболее часто используются вибрационные и виброударные, создаваемые с помощью соответствующих механизмов. Размеры рабочих органов входят в число основных, а иногда и главных параметров СМ. Так, например, вместимость ковшевых рабочих органов часто является главным параметром всей машины (одноковшовые экскаваторы, скреперы и пр.).
Характеристиками рабочего оборудования является: виды выполняемой операции, определяющей его технологическое назначение; зона действия и рабочая зона, определяющие соответственно части пространства перемещения рабочего органа соответственно в холостом и рабочем режимах; диапазон усилий, реализуемых на рабочем органе и их характер; формы и размеры рабочих органов. Первые определяют их название: ковшевые, отвальные, а вторые часто являются главными параметрами СМ.
|