Ххх. Учебное пособие Капранов Б. И., Коротков М. М., Короткова И. А. Издательство Томского политехничекого университета 2004
 Скачать 4.67 Mb. Скачать 4.67 Mb.
|

4 основные методы акустического контроля4.1. Общие сведенияАкустическими методами называют методы контроля, основанные на изменении упругих колебаний и волн в контролируемом объекте. Согласно ГОСТ 23829-79 акустические методы делят на две большие группы: Активные - использующие излучение и прием акустических колебаний Пассивные – основанные только на приеме колебаний. К активным методам относят методы, основанные на прохождении и отражении УЗК. АКТИВНЫЕ МЕТОДЫТеневой метод. Основан на ослаблении проходящих ультразвуковых волн при наличии внутри детали дефектов, создающих ультразвуковую тень (рис. 1).  Рис. 1 При теневом методе используется два преобразователя. Один из них излучает УЗК, а другой принимает их. Уменьшение интенсивности колебаний зависит от величины дефекта. Чем больше дефект, тем больше ослабляется звуковой поток. Теневой метод малочувствителен. Дефект можно обнаружить, если вызываемое им изменение сигнала составляет 15-20%. Более мелкие дефекты не обнаруживаются. Существенный недостаток теневого метода – невозможность определить глубину залегания дефекта. Кроме того, при контроле трудно определить изменения сигнала за счет дефекта от изменения сигнала за счет изменения толщины детали. Так как теневой метод не зависит от разрешающей способности излучателя, он нашел широкое применение при дефектоскопии тонких деталей (стальных листов, автомобильных покрышек и др.). Временной теневой метод. Метод основан на измерении временного запаздывания УЗ импульса при огибании дефекта. Имеет те же преимущества и недостатки что и теневой метод. Велосиметрический метод. Основан на изменении скорости упругих волн при наличии дефекта. Например, если в тонком изделии распространяется изгибная волна, то появление расслоения вызовет уменьшение ее скорости, которая обычно измеряется по сдвигу фазы прошедшей волны. В методах отражения используют как один, так и два преобразователя; применяется как правило импульсное излучение. Выделяют следующие методы: Эхо-метод. Высококачественный генератор вырабатывает кратковременные импульсы (либо с высокочастотным заполнением – радиоимпульсы, либо просто короткие импульсы). Посланный излучателем импульс, отразившись, возвращается обратно к преобразователю, который работает в это время на прием (рис. 2) 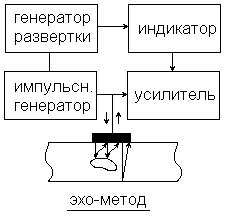 Рис. 2 С преобразователя сигнал поступает на усилитель, а затем, на отклоняющие пластины элт (рис. 3).  Рис. 3 Эхо-метод обладает рядом преимуществ перед теневым. Он позволяет использовать изделия при одностороннем доступе к ним. Это особенно ценно при проверке изделий, в которых отсутствует двусторонний доступ. Кроме того, чувствительность эхо-метода значительно выше теневого. При теневом методе ослабление УЗК на 5% трудно зарегистрировать, а при эхо-методе отражение даже 1% энергии очень хорошо не только обнаруживается, но и измеряется. Кроме того, эхо-метод позволяет определить, на какой глубине находится дефект. Если временное расстояние между зондирующим и отраженным от противоположной поверхности детали (донный импульс) принять за размер детали, то время между посылаемым импульсом и моментом прихода отраженного от дефекта импульса дает глубину залегания дефекта. Кроме того, по амплитуде отраженного сигнала можно судить о размерах дефекта, а изучая спектральный состав отраженного импульса, можно получить информацию о типе и форме дефекта. Главный недостаток эхо-метода – наличие мертвой зоны под датчиком, что не дает возможности применять его для тонких изделий. Наличие мертвой зоны связано с тем, что при близко расположенном дефекте в момент прихода эхо-сигнала от него еще продолжается излучение зондирующего импульса. Для уменьшения мертвой зоны повышают частоту УЗК, что позволяет уменьшить длительность зондирующего импульса. Длительность импульса определяет и разрешающую способность метода, т.е. минимальное расстояние между дефектами по глубине, при котором их эхо=сигналы воспринимаются раздельно. Очевидно разрешающая способность эхо-метода по глубине равна длительности зондирующего импульса. Повышение частоты с целью увеличения разрешения ограниченно сверху тем, что короткие волны начинают отражаться от границ кристаллических зерен металла, что вызывает появление помех. Кроме того, с увеличением частоты возрастает затухание УЗК. Эхо-зеркальный метод. Является разновидностью эхо-метода, и используется для обнаружения дефектов, ориентированных вертикально к поверхности изделия (рис. 4) 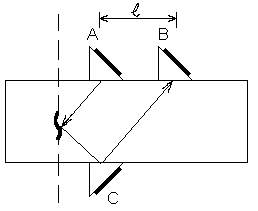 Рис. 4 Обычным эхо-методом такой дефект не обнаруживается из-за очень малой площади его сечения в плоскости поверхности. Для обнаружения таких дефектов наклонные искатели А и В располагаются на некотором расстоянии L с одной стороны изделия, либо второй тоже наклонных искатель С располагается с противоположной стороны. Расстояние L определяется толщиной изделия и углом ввода УЗК в изделие. Т.к. площадь дефекта в сечении, перпендикулярном вводимому наклонному лучу значительно превышает площадь нормального к поверхности сечения дефекта, то повышается вероятность обнаружения и чувствительность контроля. Дельта-метод. Использует рассеяние УЗК на дефектах. Для этого УЗК с помощью наклонного искателя А вводиться в изделие и распространяется в нем вдоль изделия (рис. 5). 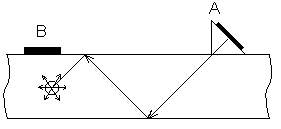 Рис. 5 Искатель В (приемник) сканирует поверхность изделия. В месте расположения дефекта УЗК будут отражаться в различных направлениях. Часть из них отразиться в направлении к поверхности и будет зарегистрирована искателем В. Этот метод позволяет получить визуальное распределение дефектов в плане. Реверберационный метод. Метод предназначен для контроля слоистых конструкций, например, металл-пластик и основан на анализе длительности реверберации УЗК (рис. 6) 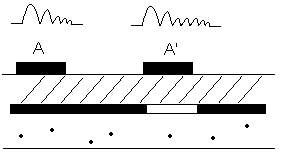 Рис. 6. Когда преобразователь расположен в точке А с плотным контактом между слоями, то УЗК проходят из металла в пластик и там гасятся. В результате потери энергии УЗК оказываются достаточно большими, что приводит к быстрому гашению реверберации. А области неплотного контакта между слоями большая часть энергии УЗК отражается назад в металл. Т.к. поглощение энергии УЗК в металле мало, то УЗК будет затухать достаточно медленно, т.е. длительность реверберации будет увеличиваться. Существует ряд методов, использующих комбинацию проходящих и отраженных УЗК. Выделяют такие методы: Зеркально-теневой метод. Измеряется амплитуда УЗК, отраженного от противоположной поверхности изделия (донный импульс), т.е. дважды прошедшего через изделие. Величина ослабления зависит от размеров дефекта. Эхо-теневой метод. В этом методе анализируются как пришедшие, так и отраженные сигналы. Эхо-сквозной метод. В этом методе фиксируется сквозной сигнал I и сигнал II, испытавший двукратное отражение (рис. 7). 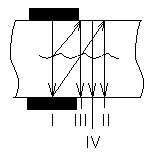 Рис. 7 При появлении дефекта эти сигналы уменьшаются как в теневом и зеркально-теневом методах. Кроме того, появляются эхо-сигналы III и IV, соответствующие отражениям дефектов лучей I и II. По сравнению с теневым методом эхо-сквозной метод обладает повышенной чувствительностью. Преимуществом по сравнению с обычным эхо-методом является уменьшение размеров мертвой зоны из-за увеличения пути отраженного сигнала. Недостаток – трудность точной оценки местоположения дефекта и его размеров. От рассмотренных методов существенно отличается Импедансный метод. Он основан на использовании зависимости полного механического импеданса (сопротивления) контролируемого изделия от качества соединения его элементов между собой (рис. 8). Изменение входного импеданса изделия может быть обнаружено по изменению амплитуды или фазы силы реакции, оказываемой на датчик или по изменению частоты датчика. Чаще всего используется для контроля клеевых, паяных, клепаных соединений. 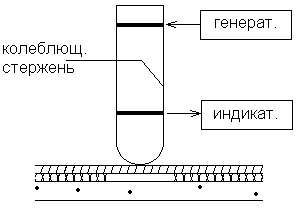 Рис. 8 В приборах импедансного типа датчик представляет собой стержень, на разных концах которого расположены излучатель и приемник. Излучатель возбуждает в стержне колебания, а приемник фиксирует их. Такой датчик приводится в акустический контакт с изделием, в результате которого изменяется либо частота колебаний стержня, либо амплитуда и фаза сигналов с приемника. При использовании стоячих волн возбуждаются свободные или вынужденные колебания либо объекта контроля в целом (интегральные методы), либо его части (локальные методы). Свободные колебания чаще всего возбуждаются путем механического удара, а вынужденные - путем воздействия гармонической силы с переменной частотой. Состояние объекта анализируется по частоте свободных колебаний. Иногда используют амплитуду колебаний. На использовании стоячих волн основаны следующие методы: Локальный метод свободных колебаний. Согласно этому методу в части контролируемого изделия возбуждают колебания с помощью ударов молоточка вибратора и анализируют спектр возбуждаемых частот (рис. 9). В дефектных изделиях, как правило, спектр смещается в высокочастотную сторону.  Рис. 9 К этой же группе относится способ, получивший сокращенное название «Предеф». Сущность его состоит в возбуждении через слой жидкости вынужденных колебаний в стенке изделия с частотой, близкой к резонансной. После окончания возбуждения стенка продолжает колебаться в свободном режиме. По частоте этих свободных колебаний с очень высокой точностью измеряют толщину стенки. Интегральный метод свободных колебаний. Здесь ударом возбуждаются во всем изделии или значительной ею части. Этот метод используется например при проверке бандажей железнодорожных колес или стеклянной посуды по частоте звона. Применяется он также в медицине для определения состояния внутренних органов (простукивание). Локальный резонансный метод. В стенке изделия с помощью преобразователя возбуждают ультразвуковые волны (рис. 10).  Рис. 10 Частоту колебаний модулируют и фиксируют частоты, на которых возникают резонансы, соответствующие целому числу полуволн в стенке изделия. По резонансным частотам измеряют толщину стенки. Дефекты фиксируют по резкому изменению толщины или пропаданию резонансов. Метод чаще всего применяется в толщиномерах при одностороннем доступе (обшивка кораблей, котлов, труб и т.д.). Сравнительно недавно резонансный метод стал применяться для проверки качества строительных материалов (кирпича, бетона, леса и т.д.). Интегральный резонансный метод. Применяют для определения модулей упругости материала по резонансным частотам продольных, изгибных или крутильных колебаний образцов простой геометрической формы. Метод применяют для контроля небольших изделий: абразивных кругов, турбинных лопаток и т.д. Появление дефектов или изменение свойств материалов определяют по отклонениям резонансных частот. К методам вынужденных колебаний относится также Акустико-топографический метод. В этом методе распределение амплитуд упругих колебаний на поверхности контролируемого объекта регистрируют с помощью наносимого на поверхность порошка. Дефективный участок отличают увеличением амплитуды колебаний в результате резонансных явлений, вследствие чего оседание порошка на нем меньше. ПАССИВНЫЕ МЕТОДЫНаиболее распространенными пассивными методами являются: метод акустической эмиссии, вибрационно-диагностический, шумо-диагностический. Вибрационно-диагностический метод В этом методе анализируются параметры вибрации какой-либо детали или узла, находящейся в рабочем режиме с помощью приемников контактного типа. Шумо-диагностический метод. В этом методе изучают спектр шумов работающего изделия с помощью микрофонных приемников. И по изменениям в спектре шумов целого изделия судят о качестве составляющих его элементов. По частотному признаку все рассмотренные методы можно разделить на низкочастотные (до 20 Кгц) и высокочастотные или ультразвуковые (свыше 20 Кгц). Метод акустической эмиссии. Метод основан на регистрации упругих волн, возникающих в процессе перестройки внутренней структуры твердых тел. Акустическая эмиссия появляется при пластической деформации, при возникновении и развитии дефектов, например при образовании трещин, при фазовых превращениях, связанных с изменением кристаллической решетки, при резании металлов. 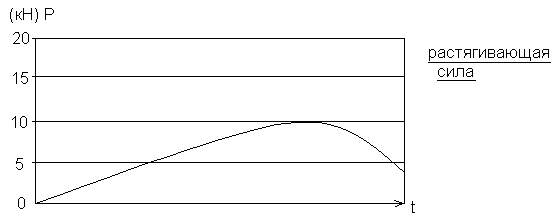 Рис. 11 Физическим механизмом акустической эмиссии является движение в веществе дислокаций и их скоплений. Неравномерность, прерывистость дислокационных процессов, связанных с отрывом дислокаций от точек закрепления, торможением их у препятствий, возникновением и уничтожением отдельных дислокаций, является причиной, обуславливающей изучение волн напряжения. Поэтому акустическая эмиссия имеет взрывной характер, представляет собой поток импульсов; длительность импульса может составлять 10-810-4с, энергия отдельного импульса от 10-9 до 10-5 Дж. Это соответствует колебаниям поверхности образца в пределах 10-11-10-4мм. Иногда эти сигналы достаточно сильны и могут восприниматься на слух (например –2 – «крик олова» при его деформации). Сигналы акустической эмиссии, распространяясь к поверхности образца, претерпевают существенные изменения вследствие дисперсии скорости звука, трансформации типов волн при отражении, преломлении, затухании и т.д. (рис. 12) 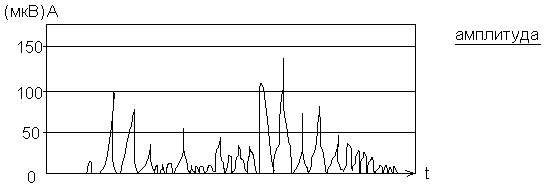 Рис. 12 Если интервал между отдельными актами излучения меньше времени затухания АЭ имеет характер непрерывного излучения, как правило нестационарного. Такая АЭ называется непрерывной или сплошной. Если время затухания сигнала и время переходных процессов в образце меньше промежутка времени между излучаемыми импульсами, АЭ воспринимается в виде последовательности импульсов и называется дискретной или импульсной. Дискретная АЭ имеет место при образовании трещин. Непрерывная – процессе резания металла. Частотный спектр сигналов АЭ широк от слышимых частот до десятков и сотен Мгц. Сигналы АЭ принимают на поверхности образца посредством контактных датчиков или бесконтактными оптическими виброметрами. В большинстве методов к образцу прикладывают механическое напряжение. Сигналы АЭ регистрируются в процессе возрастания или убывания приложенного к образцу внешнего механического напряжения. При этом концентрации напряжений вблизи дефектов вызывают локальное пластическое деформирование и появление симптомов АЭ. Объем области пластической деформации зависит от размеров дефекта и величины приложенного напряжения. Основными параметрами сигналов АЭ являются: - Общее число импульсов дискретной АЭ за исследуемый промежуток времени т.е. суммарная или интегральная Э. - Число превышений сигналом АЭ установленного уровня за исключением промежутка времени (рис. 3.13). - Интенсивность АЭ или число превышений сигналом АЭ установленного уровня за единицу времени. - Амплитуда АЭ или максимальное значение сигнала АЭ в течении заданного промежутка времени. - Уровень сигналов АЭ или среднее квадратичное сигнала за рассматриваемый промежуток времени. Методы акустической эмиссии используются для раннего распознавания трещин при испытаниях материалов на прочность , для выявления дефектов в стадии их зарождения, для локации дефектов и изучения кинетики развития трещин в сварных швах и др. 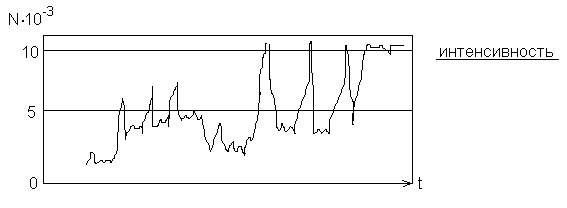 Рис. 13 При повторном напряжении эмиссия не возникает вплоть до достижения максимального напряжения предыдущего цикла (эффект Кайзера). Электрическая связь между энергией АЭ и параметрами трещины имеет вид: V2 = K2(2∆L)/E; где: K – коэффициент концентрации напряжений на вершине трещины E – модуль упругости (модуль Юнга) ∆L – приращение длины трещины Число используемых импульсов пропорционально K4. |