|
|
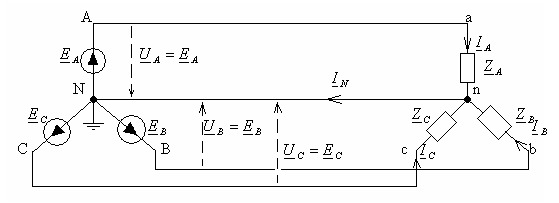
Условные положительные направления эдс, токов, напряжений
Вопрос 22 Расчет несимметричных режимов в четырехпроводной и трехпроводной цепях при соединении приёмников звездой. Назначение нейтрального провода. Напряжение смещения нейтрали.
Однофазные приёмники подключаются к трёхфазной сети по схеме “звезда с нейтральным (нулевым) проводом.
- заземление
Nn – нейтральный (нулевой) провод
Добавление нейтрального провода обеспечивает независимую работу фаз приёмника.
При неодинаковых сопротивлениях фаз обрыв нейтрального провода приводит к аварийному режиму: на одной (двух) фазах напряжение становится больше номинального, а на двух (одной) других – меньше номинального.
Расчёт трёхфазных цепей
При расчёте трёхфазных цепей обязательно учитывают, что ЭДС (или напряжения) фаз источника сдвинуты по фазе на угол 120۫.
1.Расчёт соединения (“звезда с нейтральным проводом”)

Система В применяется в большинстве случаев при электроснабжении бытовых потребителей административных и производственных зданий.
Если сопротивления всех фаз приёмника абсолютно одинаковы, то нагрузка симметрична.
При .
ZA=ZB=ZC=ZФ.
, , .
|
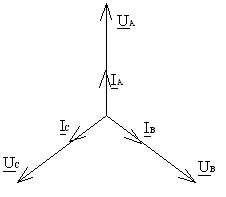
IA=IB=IC=;

|
Вопрос 25 Магнитные и немагнитные материалы
В магнитных цепях различных электрических машин, трансформаторов, приборов и аппаратов электротехники, радиотехники и других отраслей техники встречаются разнообразные магнитные и немагнитные материалы.
Свойства магнитного материала характеризуются величинами напряженности магнитного поля, магнитного потока, магнитной индукции и магнитной проницаемости. Зависимость между магнитной индукцией и напряженностью магнитного поля, выраженная графически, образует кривую, называемую петлей гистерезиса. Пользуясь этой кривой, можно получить ряд данных, характеризующих магнитные свойства материала.
Переменное магнитное поле вызывает появление в магнитных материалах вихревых токов. Эти токи нагревают сердечники (магнитопроводы), что приводит к затрате некоторой мощности.
Для характеристики материала, работающего в переменном магнитном поле, суммарное значение мощности, затрачиваемой на гистерезис и вихревые токи при частоте 50 гц, относят к 1 кг веса материала. Эта величина называется удельными потерями и выражается в вт/кг.
Магнитная индукция того или иного магнитного материала не должна превышать некоторой максимальной величины в зависимости от вида и качества данного материала. Попытки увеличить индукцию приводят к увеличению потерь энергии в данном материале и нагреву его.
Магнитные материалы делятся на две группы: магнитно-мягкие и магнитно-твердые.
Магнитно-мягкие материалы. Магнитно-мягкие материалы должны отвечать следующим требованиям:
1) обладать большой относительной магнитной проницаемостью , позволяющей получать большую магнитную индукцию В при возможно малом числе ампер-витков;
2) иметь возможно меньшие потери на гистерезис и вихревые токи;
3) обладать стабильностью магнитных свойств.
Магнитно-мягкие материалы используются в качестве магни-топроводов электрических машин, сердечников трансформаторов, дросселей, электромагнитов реле, электроизмерительных приборов и т. п. Магнитно-твердые материалы. Магнитно-твердые материалы применяются для изготовления постоянных магнитов. Эти материалы должны отвечать следующим требованиям:
1) обладать большой остаточной индукцией;
2) иметь большую максимальную магнитную энергию;
3) обладать стабильностью магнитных свойств.
Самым дешевым материалом для постоянных магнитов является углеродистая сталь (0,4—1,7% углерода, остальное — железо). Магниты, изготовленные из углеродистой стали, обладают невысокими магнитными свойствами и быстро теряют их под влиянием нагрева, ударов и сотрясений.
Легированные стали обладают лучшими магнитными свойствами и применяются для изготовления постоянных магнитов чаще, чем углеродистая сталь. К таким сталям относятся хромистая, вольфрамовая, кобальтовая и кобальто-молибденовая.
Для изготовления постоянных магнитов в технике разработаны сплавы на основе железа—никеля— алюминия. Эти сплавы отличаются высокой твердостью и хрупкостью, поэтому они могут обрабатываться только шлифованием. Сплавы обладают исключительно высокими магнитными свойствами и большой магнитной энергией в единице объем.Немагнитные материалы. В различных приборах и аппаратах, применяемых в электротехнике, необходимо иметь материал, не обладающий магнитными свойствами. Для таких целей пригодны пластмасса и цветные металлы (алюминий, латунь, бронза). Однако эти материалы обладают малой механической прочностью, а некоторые из них дефицитны. В связи с этим они заменяются немагнитной сталью и немагнитным чугуном.
Магнитная цепь — последовательность взаимосвязанных магнетиков, по которым проходит магнитный поток. При расчётах магнитных цепей используется почти полная формальная аналогия с электрическими цепями. В схожем математическом аппарате также присутствует закон Ома, правила Кирхгофа и другие термины и закономерности. Магнитная цепь и сопутствующий математический аппарат используется для расчётов трансформаторов, электрических машин, магнитных усилителей и т.п. В зависимости от источника магнитного потока магнитные цепи подразделяются на поляризованные и нейтральные. В отличие от нейтральных, поляризованные магнитные цепи содержат постоянные магниты.
ЗАКОН ПОЛНОГО ТОКА один из основных законов электромагнитного поля. Устанавливает взаимосвязь между магнитной силой и величиной тока, проходящего через поверхность. Под полным током понимается алгебраическая сумма токов, пронизывающих поверхность, ограниченную замкнутым контуром.
Намагничивающая сила вдоль контура равна полному току, проходящему сквозь поверхность, ограниченную этим контуром. В общем случае напряженность поля на различных участках магнитной линии может иметь разные значения, и тогда намагничивающая сила будет равна сумме намагничивающих сил каждой линии.
Закон Ома гласит: Сила тока в однородном участке цепи прямо пропорциональна напряжению, приложенному к участку, и обратно пропорциональна электрическому сопротивлению этого участка.
И записывается формулой: R=U/ I. (Где: I — сила тока (А), U — напряжение (В), R — сопротивление (Ом).)
|
Вопрос 26 Назначение, устройство и принцип действия однофазного трансформатора.
Однофазным трансформатором называют статический индуктивный преобразователь, имеющий две или больше индуктивно связанных взаимно неподвижных обмоток и предназначенный для преобразования посредством электромагнитной индукции параметров электрической энергии переменного тока (напряжения, тока, частоты). Однофазный трансформатор выполняется в одном из двух видов. Первым примером выполнения однофазного трансформатора является однофазный трансформатор, так называемого стержневого типа. У него первичные и вторичные катушки расположены на железных стержнях, соединенных с торцов железными же накладками, называемыми ярмами. Таким образом, два стержня и два ярма образуют замкнутое железное кольцо, в котором и проходит магнитный поток, сцепляющийся с первичной и вторичной обмотками. Это железное кольцо называется сердечником трансформатора.Вторым примером выполнения однофазного трансформатора может служить однофазный трансформатор броневого типа. У этого трансформатора первичные и вторичные обмотки, состоящие каждая из ряда плоских катушек, расположены на сердечнике, образуемом двумя стержнями двух железных колец. Кольца окружая обмотки покрывают их почти целиком как бы бронею, поэтом у описываемый однофазный трансформатор называется броневым.Конструкция однофазного трансформатора состоит из активных и конструктивных частей. К активным частям однофазного трансформатора относятся магнитопровод и обмотки.Однофазный трансформатор небольшой мощности применяют в качестве сварочного, измерительного, испытательного, специального назначения и для бытовых нужд. Измерительный однофазный трансформатор предназначен для включения электрических измерительных приборов в сети высокого напряжения или сильного тока.Испытательный однофазный трансформатор используется для получения высоких и сверхвысоких напряжений, необходимых при испытаниях на электрическую прочность электроизоляционных изделий. Однофазные трансформаторы – радиотрансформаторы, применяются в устройствах радио- и проводной связи, в системах автоматики и телемеханики для получения требуемых напряжений, согласования сопротивлений электрических цепей, гальванического разделения цепей и др.Мощный однофазный трансформатор служит для трансформации электрической энергии трехфазного тока и для питания специальных промышленных установок.
|
27. ОПЫТ ХОЛОСТОГО ХОДА И КОРОТКОГО ЗАМЫКАНИЯ ОПЫТ ХОЛОСТОГО ХОДА
Для испытания трансформатора служит опыт холостого хода и опыт короткого замыкания.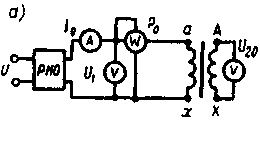
При опыте холостого хода трансформатора (рис. 103) его вторичная обмотка разомкнута и тока в этой обмотке нет.
Если первичную обмотку трансформатора включить в сеть источника электрической энергии переменного тока, то в этой об�мотке будет протекать ток холостого хода I0, который представляет собой малую ве�личину по сравнению с номинальным то�ком трансформатора. В трансформаторах больших мощностей ток холостого хода может достигать значений порядка 5— 10% номинального тока. В трансформато�рах малых мощностей этот ток достигает значения 25—30% номинального тока. Ток холостого хода I0 создает магнитный поток в магнитопроводе трансформатора. Для возбуждения магнитного потока трансформатор потребляет реактивную мощ�ность из сети. Что же касается активной мощности, потребляемой трансформатором при холостом ходе, то она расходуется на покры�тие потерь мощности в магнитопроводе, обусловленных гистерезисом и вихревыми токами.
Так как реактивная мощность при холостом ходе трансформа�тора значительно больше активной мощности, то коэффициент мощности cos φ его весьма мал и обычно равен 0,2-0,3.
По данным опыта холостого хода трансформатора определяется сила то�ка холостого хода I0, потери в стали сердечника Рст и коэффициент транс�формации К.
Силу тока холостого хода I0 изме�ряет амперметр, включенный в цепь первичной обмотки трансформатора.
При испытании трехфазного транс�форматора определяется фазный ток холостого хода.
О потерях в стали сердечника Pст судят по показаниям ваттметра, включенного в цепь первичной обмотки трансформатора.
Коэффициент трансформации трансформатора равен отноше�нию показаний вольтметров, включенных в цепь первичной и вто�ричной обмоток.
Опыт короткого замыкания
При коротком замыкании вторичной обмотки сопротивление трансформатора очень мало и ток короткого замыкания во много раз больше номинального. Такой большой ток вызывает сильный нагрев обмоток трансформатора и приводит к выходу его из строя. Поэтому трансформаторы снабжаются защитой, отключающей его при коротких замыканиях.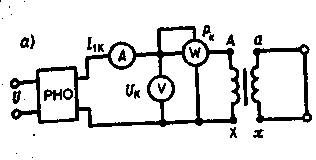
При опыте короткого замыкания вторичная обмотка трансформатора замкнута накоротко, т. е. напряжение на зажи�мах вторичной обмотки равно нулю. Первичная обмотка включает�ся в сеть с таким пониженным напряжением, при котором токи в обмотках равны номинальным. Такое пониженное напряжение называется напряжением короткого замыкания и обычно равно 5,5% от номинального значения.
По данным опыта короткого замыкания определяется напряже�ние короткого замыкания uк %, его активная uа % и реактивная ux % составляющие, потери на нагревание обмоток трансформато�ра Pобм при номинальной нагрузке и активное, реактивное и пол�ное сопротивления трансформатора при коротком замыкании rk, xk и zk.
Потери в обмотках указываются ваттметром. Активное, реактивное и полное сопротивления короткого замы�кания трансформатора определяются следующими выражениями:
где Uk, I и Pk- напряжение, сила тока, мощность, указываемые измерительными приборами, включенными в цепь первичной об�мотки трансформатора.
При испытании трехфазного трансформатора следует в приве�денных выше выражениях подставить фазные значения напряже�ния, тока и мощности.
Напряжение короткого замыкания и его активная и реактивная составляющие равны:

где Uн и Iн — номинальные напряжения и сила тока вторичной (первичной) обмотки трансформатора.
|
35.Принцип действия трехфазного синхронного двигателя, его пуск и характеристики. Регулирование коэффициента мощности.
Синхронная машина — это электрическая машина переменного тока, частота вращения ротора которой равна частоте вращения магнитного поля в воздушном зазоре.
Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля якоря и магнитного поля полюсов индуктора. Обычно якорь расположен на статоре, а индуктор — на роторе. В мощных двигателях в качестве полюсов используются электромагниты (ток на ротор подаётся через скользящий контакт щетка - кольцо), в маломощных — постоянные магниты. Существует обращённая конструкция двигателей, в которой якорь расположен на роторе, а индуктор — на статоре (в устаревших двигателях, а также в современных криогенных синхронных машинах, в которых в обмотках возбуждения используются сверхпроводники.)
Запуск двигателя. Двигатель требует разгона до частоты, близкой к частоте вращения магнитного поля в зазоре, прежде чем сможет работать в синхронном режиме. При такой скорости вращающееся магнитное поле якоря сцепляется с магнитными полями полюсов индуктора (если индуктор расположен на статоре, то получается, что вращающееся магнитное поле вращающегося якоря (ротора) неподвижно относительно постоянного поля индуктора (статора), если индуктор на роторе, то магнитное поле вращающихся полюсов индуктора (ротора) неподвижно относительно вращающегося магнитного поля якоря (статора)) — это называется «вошёл в синхронизм».
Для разгона обычно используется асинхронный режим, при котором обмотки индуктора замыкаются через реостат или накоротко, как в асинхронной машине, для такого режима запуска в машинах на роторе делается короткозамкнутая обмотка, которая также выполняет роль успокоительной обмотки, устраняющей "раскачивание" ротора при синхронизации. После выхода на скорость близкую к номинальной (>95%) индуктор запитывают постоянным током.
|
36.Синхронный компенсатор.
Синхронный компенсатор (СК) представляет собой синхронный двигатель облегчённой конструкции, предназначенный для работы на холостом ходу. При работе в режиме перевозбуждения СК является генератором реактивной мощности. Наибольшая мощность СК в режиме перевозбуждения называется его номинальной мощностью. При работе в режиме недовозбуждения СК является потребителем реактивной мощности. По конструктивным условиям СК обычно не может потреблять из сети такую же реактивную мощность, которую он может генерировать. Изменение тока возбуждения СК обычно автоматизируется. При работе СК из сети потребляется активная мощность порядка 2-4%.
|
28. Потери энергии и КПД трансформатора. Паспортные данные трансформаторов.
В процессе трансформирования электрической энергии часть энергии теряется в трансформаторе
на покрытие потерь. Потери в трансформаторе разделяются на электрические и магнитные.
Электрические потери. Обусловлены нагревом обмоток трансформаторов при прохождении по
этим обмоткам электрического тока. Мощность электрических потерь РЭ пропорциональна
квадрату тока и определяется суммой электрических потерь в первичной РЭ1 и во вторичной РЭ2 обмотках:
Рэ = Рз1 + Рэ2 = mI12r1+ mI’22r’2, (1.73)
где т — число фаз трансформатора (для однофазного трансформатора т = 1, для трехфазного т = 3).
При проектировании трансформатора величину электрических потерь определяют по (1.73), а для изготовленного
трансформатора эти потери определяют опытным путем, измерив мощность к.з. (см. § 1.11) при номинальных токах в обмотках Рк.ном-
Pэ=β2Pk.ном, (1.74)
где Р — коэффициент нагрузки (см. § 1.13).
Электрические потери называют переменными, так как их величина зависит от нагрузки
трансформатора (рис. 1.40).
Магнитные потери. Происходят главным образом в магнитопроводе трансформатора. Причина
этих потерь — систематическое перемагничивание магнитопровода переменным магнитным полем.
Это перемагничивание вызывает в магнитопроводе два вида магнитных потерь: потери от
гистерезиса РГ, связанные с затратой энергии на уничтожение остаточного магнетизма в ферромагнитном
материале магнитопровода, и потери от вихревых токов РВТ, наводимых переменным магнитным полем в пластинах
магнитопровода:
PМ=PГ+PВ.Т
С целью уменьшения магнитных потерь магнитопровод трансформатора выполняют из
магнитно-мягкого ферромагнитного материала — тонколистовой электротехнической стали. При этом
магнитопровод делают шихтованным в виде пакетов из тонких пластин (полос), изолированных с двух
сторон тонкой пленкой лака.
Магнитные потери от гистерезиса прямо пропорциональны частоте перемагничивания магнитопровода, т. е.
частоте переменного тока (РГ = f), а магнитные потери от вихревых токов пропорциональны квадрату этой
частоты (PВТ ≡ f2). Суммарные магнитные потери принято считать пропорциональными частоте тока степени
1,3, т. е. РМ = f1,3. Величина магнитных потерь зависит также и от магнитной индукции в стержнях
и ярмах магнитопровода (Рм ≡ В2) При неизменном 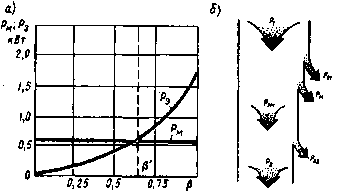
первичном напряжении (U1 = const) магнитные потери
постоянны, т.е. не зависят от нагрузки трансформатора (рис. 1.40, а).
Рис. 1.40. Зависимость потерь трансформатора от его нагрузки (а) и
энергетическая диаграмма (б) трансформатора
При проектировании трансформатора магнитные потери определяют
по значению удельных магнитных потерь РУД, происходящих в 1 кг
тонколистовой электротехнической стали при значениях магнитной
индукции 1,0; 1,5 или 1,7 Тл и частоте перемагничивания 50 Гц:

,
где В — фактическое значение магнитной индукции в стержне или ярме магнитопровода трансформатора, Тл; Вх — магнитная индукция, соответствующая принятому значению удельных магнитных потерь, например Вх = 1,0 или 1,5 Тл; G — масса стержня или ярма магнитопровода, кг.
Значения удельных магнитных потерь указаны в ГОСТе на тонколистовую электротехническую
сталь. Например, для стали марки 3411 толщиной 0,5 мм при В = 1,5 Тл и f= 50 Гц удельные магнитные потери P1.5/50=2,45 Вт/кг.
Для изготовленного трансформатора магнитные потери определяют опытным путем, измерив мощность х.х. при номинальном первичном напряжении Р0ном (см. § 1.11).
Таким образом, активная мощность Р1, поступающая из сети в первичную обмотку трансформатора, частично расходуется на электрические потери в этой обмотке Рэ1. Переменный магнитный поток вызывает в магнитопроводе трансформатора магнитные потери Рэм. Оставшаяся после этого мощность, называемая электромагнитной мощностью Рэм = Р1 - Рэ1 - Рм , передается во вторичную обмотку, где частично расходуется на электрические потери в этой обмотке Рэ2.
Активная мощность, поступающая в нагрузку трансформатора, Р2 = Р1 - ∑Р , где ∑Р=Рэ1+Рм+Рэ2 — суммарные потери в трансформаторе. Все виды потерь, сопровождающие рабочий процесс трансформатора, показаны на энергетической диаграмме (рис. 1.40, б).
Коэффициент полезного действия трансформатора определяется как отношение активной мощности на выходе вторичной обмотки Р2 (полезная мощность) к активной мощности на входе первичной обмотки Р1 (подводимая мощность):
η= P2/Р1=(Р1-∑P)/Р1 = l-∑P/Р1.
Сумма потерь ∑P=P0ном+β2Pк.ном.
Активная мощность на выходе вторичной обмотки трехфазного трансформатора (Вт)
Р2 = √3U2I2cosφ2=βSномcosφ2 ,
где Sном= √3U2HOM I2HOM — номинальная мощность трансформатора, В-А; I2 и U2 — линейные значения тока, А, и напряжения В.
Учитывая, что Р1 = Р2 + ∑Р, получаем выражение для расчета КПД трансформатора:
 (1.79) (1.79)
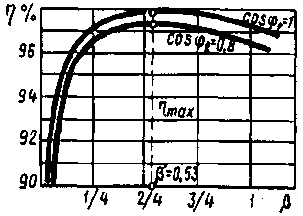
Рис.1.41. График зависимости КПД трансформатора от нагрузки
Анализ выражения (1.79) показывает, что КПД трансформатора зависит как от
величины (β), так и от характера (cosφ2) нагрузки. Эта зависимость иллюстрируется
графиками (рис. 1.41). Максимальное значение КПД соответствует нагрузке, при которой магнитные
потери равны электрическим: Р0ном =β'2/РК.НОМ, отсюда значение коэффициента нагрузки,
соответствующее максимальному КПД,

Обычно КПД трансформатора имеет максимальное значение при β'=0,45÷0,65. Подставив в (1.79) вместо Р значение Р' по (1.80), получим выражение максимального
КПД трансформатора:

Помимо рассмотренного КПД по мощности иногда пользуются понятием КПД по энергии, который представляет собой отношение количества энергии, отданной
трансформатором потребителю W2 (кВт-ч) в течение года, к энергии W1, полученной им от питающей электросети за это же время: η=W2/W1.
КПД трансформатора по энергии характеризует эффективность эксплуатации трансформации.
Все трансформаторы промышленного производства снабжены паспортом, содержащим следующие данные:
1. Отношение номинальных напряжений U1H /U2H;2. Номинальную мощность SH;3. Ток холостого хода Ix(10-14%);4. Потери при холостом ходе Px;5. Напряжение при коротком замыкании uk(7-12%); 6. Потери при коротком замыкании Pk.
|
31. Устройство и принцип действия трехфазного асинхронного двигателя
Асинхронные электродвигатели (АД) находят в народном хозяйстве широкое применение. По разным данным до 70% всей электрической энергии, преобразуемой в механическую энергию вращательного или поступательного движения, потребляется асинхронным двигателем. Электрическую энергию в механическую энергию поступательного движения преобразуют линейные асинхронные электродвигатели, которые широко используются в электрической тяге, для выполнения технологических операций. Широкое применение АД связано с рядом их достоинств. Асинхронные двигатели - это самые простые в конструктивном отношении и в изготовлении, надежные и самые дешевые из всех типов электрических двигателей. Они не имеют щеточноколлекторного узла либо узла скользящего токосъема, что помимо высокой надежности обеспечивает минимальные эксплуатационные расходы. В зависимости от числа питающих фаз различают трехфазные и однофазные асинхронные двигатели. Трехфазный асинхронный двигатель при определенных условиях может успешно выполнять свои функции и при питании от однофазной сети. АД широко применяются не только в промышленности, строительстве, сельском хозяйстве, но и в частном секторе, в быту, в домашних мастерских, на садовых участках. Однофазные асинхронные двигатели приводят во вращение стиральные машины, вентиляторы, небольшие деревообрабатывающие станки, электрические инструменты, насосы для подачи воды. Чаще всего для ремонта или создания механизмов и устройств промышленного изготовления или собственной конструкции применяют трехфазные АД. Причем в распоряжении конструктора может быть как трехфазная, так и однофазная сеть. Возникают проблемы расчета мощности и выбора двигателя для того или другого случая, выбора наиболее рациональной схемы управления асинхронным двигателем, расчета конденсаторов, обеспечивающих работу трехфазного асинхронного двигателя в однофазном режиме, выбора сечения и типа проводов, аппаратов управления и защиты. Такого рода практическим проблемам посвящена предлагаемая вниманию читателя книга. В книге приводится также описание устройства и принципа действия асинхронного двигателя, основные расчетные соотношения для двигателей в трехфазном и однофазном режимах.
Трехфазный асинхронный двигатель (АД) традиционного исполнения, обеспечивающий вращательное движение, представляет собой электрическую машину, состоящую из двух основных частей: неподвижного статора и ротора, вращающегося на валу двигателя. Статор двигателя состоит из станины, в которую впрессовывают так называемое электромагнитное ядро статора, включающее магнитопровод и трехфазную распределенную обмотку статора. Назначение ядра - намагничивание машины или создание вращающегося магнитного поля. Магнитопровод статора состоит из тонких (от 0,28 до 1 Мм) изолированных друг от друга листов, штампованных из специальной электротехнической стали. В листах различают зубцовую зону и ярмо (рис. 1.а). Листы собирают и скрепляют таким образом, что в магнитопроводе формируются зубцы и пазы статора (рис. 1.б). Магнитопровод представляет собой малое магнитное сопротивление для магнитного потока, создаваемого обмоткой статора, и благодаря явлению намагничивания этот поток усиливает. В пазы магнитопровода укладывается распределенная трехфазная обмотка статора. Обмотка в простейшем случае состоит из трех фазных катушек, оси которых сдвинуты в пространстве по отношению друг к другу на 120°. Фазные катушки соединяют между собой по схемам звезда, либо треугольник.
Принцип действия трехфазных асинхронных двигателей
Выше отмечалось, что трехфазная обмотка статора служит для намагничивания машины или создания так называемого вращающегося магнитного поля двигателя. В основе принципа действия асинхронного двигателя лежит закон электромагнитной индукции. Вращающееся магнитное поле статора пересекает проводники короткозамкнутой обмотки ротора, отчего в последних наводится электродвижущая сила, вызывающая в обмотке ротора протекание переменного тока. Ток ротора создает собственное магнитное поле, взаимодействие его с вращающимся магнитным полем статора приводит к вращению ротора вслед за полями. Наиболее наглядно идею работы асинхронного двигателя иллюстрирует простой опыт, который еще в XVIII веке демонстрировал французский академик Араго . Если подковообразный магнит вращать с постоянной скоростью вблизи металлического диска, свободно расположенного на оси, то диск начнет вращаться вслед за магнитом с некоторой скоростью, меньшей скорости вращения магнита. Это явление объясняется на основе закона электромагнитной индукции. При движении полюсов магнита около поверхности диска в контурах под полюсом наводится электродвижущая сила и появляются токи, которые создают магнитное поле диска. Читатель, которому трудно представить проводящие контуры в сплошном диске, может изобразить диск в виде колеса со множеством проводящих ток спиц, соединенных ободом и втулкой. Две спицы, а также соединяющие их сегменты обода и втулки и представляют собой элементарный контур. Поле диска сцепляется с полем полюсов вращающегося постоянного магнита, и диск увлекается собственным магнитным полем. Очевидно, наибольшая электродвижущая сила будет наводиться в контурах диска тогда, когда диск неподвижен, и напротив, наименьшая, когда близка к скорости вращения диска. Перейдя к реальному асинхронному двигателю отметим, что короткозамкнутую обмотку ротора можно уподобить диску, а обмотку статора с магнитопроводом - вращающемуся магниту. Однако вращение магнитного поля в неподвижном статоре а осуществляется благодаря трехфазной системе токов, которые протекают в трехфазной обмотке с пространственным сдвигом фаз.
|
32. Механические и рабочие характеристики асинхронного двигателя и его паспортные данные
Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при установившемся режиме работы.
n= f(М) или s = f(M).
Механическая характеристика является одной из важнейших характеристик двигателя. При выборе двигателя к производственному механизму из множества двигателей с различными механическими характеристиками выбирают тот, механическая характеристика которого удовлетворяет требованиям механизма.
Уравнение механической характеристики асинхронного двигателя может быть получено на основании формулы и схемы замещения.
С помощью схемы замещения определяют приведенный ток фазы ротора: 
Где 
Полученное значение тока I'2 nподставляют в уравнение момента , в котором предварительно  и и  заменяют через их приведенные значения: заменяют через их приведенные значения:
M = 
После подстановки получим:
M = 
Это выражение представляет собой уравнение механической характеристики, поскольку оно связывает момент и скольжение двигателя. Остальные входящие в уравнение величины: напряжение сети и параметры двигателя — постоянны 1 и не зависят от s и М. Располагая параметрами двигателя, можно рассчитать и построить его механическую характеристику.
Сопротивление r2 зависит от частоты f2 и, следовательно, от s, но для двигателей общего назначения изменение r2 незначительно.
Однако необходимо отметить, что после включения двигателя в нем происходят сложные переходные электромагнитные процессы. В тех случаях, когда время разбега оказывается соизмеримым с временем электромагнитных процессов, механическая характеристика двигателя в период разбега может существенно отличаться от статической.
Одной из важных точек характеристики, представляющей интерес при анализе работы и выборе двигателя, является точка, где момент, развиваемый двигателем, достигает наибольшего значения. Эта точка имеет координаты nкр , sкр , Mmax . Значение критического скольжения sкр , при котором двигатель развивает максимальный (критический) момент Мmax, легко определить, если взять производную dM/ds выражения и приравнять ее нулю.
После дифференцирования и последующих преобразований выражение sкр будет иметь следующий вид:  где где  = x1 + х'2. = x1 + х'2.
Подставив  вместо s в это уравнение ,получим выражение максимального момента вместо s в это уравнение ,получим выражение максимального момента 
Необходимо отметить, что из этих выражений вытекает следующее.
Момент, развиваемый двигателем, при любом скольжении пропорционален квадрату напряжения. Максимальный момент пропорционален квадрату напряжения и не зависит от сопротивления цепи ротора. Критическое скольжение пропорционально сопротивлению цепи ротора и не зависит от напряжения сети.
Полученные выражения удобны для анализа, однако из-за отсутствия в каталогах параметров r1, х1, х2 их использование для расчетов и построения характеристик затруднено.
В практике обычно пользуются уравнением механической характеристики, с помощью которого можно произвести необходимые расчеты и построения, используя только каталожные данные.
Активное сопротивление обмотки статора r1 значительно меньше остальных сопротивлений цепи статора и ротора, и им обычно пренебрегают. Тогда эти выражения будут иметь вид:
M= ; ;
 ; ; 
Упрощенное уравнение механической характеристики получается из совместного решения уравнений
M= ; ;
Значение Мmax определяется из отношения Мmax/Мном = λ, указываемого в каталогах, a sкр — из этого уравнения, если решить его относительно sкр и вместо текущих значений s и М подставить их номинальные значения, которые легко определить по паспортным данным:
 , ,
где sном = (n0 - nном)/n0; λ = Мmax/Мном.
Следует отметить, что в зоне от М = 0 до М ≈ 0,9Мmax механическая характеристика близка к прямой линии. Поэтому, например, при расчетах пусковых и регулировочных резисторов эту часть механической характеристики принимают за прямую линию, проходящую через точки М = 0, n = n0 и Мном , nном . Уравнение механической характеристики в этой части будет иметь вид
M= . .
|
34 Устройство трехфазной синхронной машины. Принцип действия синхронного генератора.
Устройство трехфазной синхронной машины
Статор синхронной машины устроен так же, как асинхронной. В пазы пакета из листов электротехнической стали уложены катушки трехфазной обмотки, токи которой создают вращающееся магнитное поле. Обмотку статора обычно соединяют звездой. Ротор синхронной машины представляет собой электромагнит. Обмотку ротора, которую называют обмоткой возбуждения, подключают через два контактных кольца и щетки к независимому источнику постоянного напряжения.
Роторы выполняются явнополюсными или неявнополюсными. Явнополюсный ротор имеет выступающие полюсы, на которые надеты катушки обмотки возбуждения. Синхронные машины проектируются так, чтобы количество полюсов вращающегося магнитного поля статора было равно количеству полюсов статора. От количества полюсов зависит синхронная частота вращения ротора.
,
где f – частота тока в сети, Гц;
р – число пар полюсов.
Явнополюсные роторы применяются в синхронных машинах с большим числом полюсов и соответственно относительно низкой частоты вращения.
Неявнополюсные роторы имеют распределенную обмотку возбуждения, которая укладывается в пазы, вырезанные в целой стальной поковке. При этом обеспечивается высокая механическая прочность ротора. Такие роторы применяются в синхронных машинах большой мощности, имеющих одну или две пары полюсов, и соответственно, частоту вращения n=3000 об/мин или 1500 об/мин. Неявновыраженные роторы имеют синхронные генераторы, предназначенные для непосредственного соединения с паровыми и газовыми турбинами ТЭС и АЭС. Такие машины называются турбогенераторами.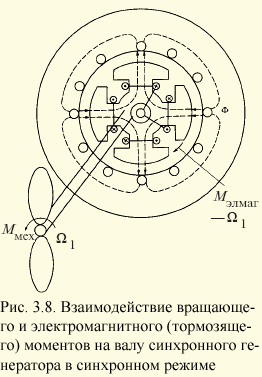
Принцип действия синхронных генераторов
Вращение ротора с размещенной на нем обмоткой возбуждения, создающей магнитное поле чередующейся полярности (см. рис. 3.1), приводит к возникновению ЭДС в проводниках обмотки статора, который нередко называется якорем. Индуктируемая ЭДС равна произведению скорости магнитного поля возбуждения на его интенсивность. Интенсивность поля возбуждения определяется током обмотки возбуждения и числом ее витков.
При присоединении генератора к нагрузке, т.е. к потребителю электрической энергии или к электрической сети, ЭДС обмотки статора создает в ней ток. Обмотка статора — трехфазная, поэтому протекающие по ней токи — тоже трехфазные. Они создают вращающееся со скоростью ротора магнитное поле. Магнитное поле обмотки статора вращается с той же частотой вращения, что и ротор. Таким образом, в синхронном генераторе оба магнитных поля: обмотки ротора, созданное постоянным током возбуждения, и обмотки статора, созданное переменными токами трехфазной обмотки, оказываются взаимно неподвижными, вращающимися синхронно. (Следует заметить, что взаимная неподвижность магнитных полей обмоток статора и ротора характерна практически для всех традиционных видов электрических машин.)
Взаимодействие магнитных полей ротора и статора создает электромагнитный момент, направленный в генераторном режиме электрической машины навстречу механическому моменту, созданному паровой, газовой или гидравлической турбиной. В случае равенства этих двух моментов ротор генератора будет вращаться с постоянной скоростью, обеспечивая индуктирование стабильной частоты ЭДС обмотки статора, совпадающей с частотой напряжения сети. Это нормальный синхронный режим работы генератора, когда частота вращения (угловая скорость) ротора определяется частотой напряжения сети. Задачей персонала является регулирование подачи на турбину, создающую механический момент, требуемого количества агента (пара, газа, воды) необходимых параметров для обеспечения равновесия вращающего и тормозящего электромагнитного моментов (рис. 3.8).
При аварийном отключении генератора от нагрузки токи статора становятся равными нулю. Электромагнитный тормозящий момент также исчезает, а из-за сохраняющегося вращающего механического момента ротор начинает разгоняться сверх номинальной скорости до тех пор пока не будет прекращена подача агента (т.е. пара, газа, воды и т.п.) на турбину. Очевидно, что наиболее быстро это можно осуществить для паровой или газовой турбин. Частота вращения при этом успевает возрасти на 10—20 %. Гораздо сложнее остановить поток воды. В зависимости от типа применяемого гидравлического колеса частота вращения может возрасти в процессе прекращения подачи воды в 1,8—3,5 раза по сравнению с номинальной. Эта предельно возможная частота вращения ротора при наиболее неблагоприятном отказе системы регулирования подачи воды в турбину носит название угонной частоты вращения, или угонной скорости. Механическая прочность ротора генератора рассчитывается так, чтобы при угонной частоте вращения механические напряжения в элементах ротора из-за действующих центробежных сил, пропорциональных квадрату частоты вращения, не превосходили пределов текучести материалов ротора. Деформация обода ротора не должна превышать размера воздушного зазора. После того как гидрогенератор вращался с угонной частотой вращения, его следует остановить для тщательного осмотра, контроля всех креплений, а в случае необходимости, и для ремонта. В соответствии с ГОСТ все гидрогенераторы должны в течение 2 мин выдерживать без остаточных деформаций повышенную частоту вращения, равную 1,75 номинальной. В этих случаях останавливать их для осмотра необязательно.
| |
|
|
 Скачать 1.24 Mb.
Скачать 1.24 Mb.