Обогатительная ф.. В представленном дипломном проекте рассматривается электрификация и автоматизация технологических процессов в условиях горнообогатительного комбината ак алроса (пао)
 Скачать 1.14 Mb. Скачать 1.14 Mb.
|

|
8.3. Обоснование применения преобразователей частоты для насосов ГРАТ Наиболее перспективным и широко используемым в настоящее время способом регулирования частоты вращения асинхронных двигателей является частотный способ. Этот способ обеспечит плавное регулирование в широком диапазоне, получаемые характеристики обладают высокой жесткостью. Частотный способ к тому же отличается и еще одним весьма важным свойством: при регулировании скорости АД не происходит увеличения его скольжения, как это имеет место, например, при реостатном регулировании. Применение частотного преобразователя в электроприводе насоса дает ряд преимуществ: снижение потребляемой мощности на 25-40%; поддержание постоянного уровня откачиваемого материала в зумпфе; плавный пуск электродвигателя насоса, и как следствие уменьшение нагрузки на сеть; уменьшение износа рабочих колес и корпусов насосов, а также трубопровода и задвижки на всасывающей трубе за счет плавных пусков и работы продолжительное время на пониженной скорости вращения приводного двигателя; Ежегодная наработка асинхронного двигателя электропривода насоса составляет около 5500 часов. При регулировании подачи с помощью задвижки происходит излишнее потребление электроэнергии. Согласно данным, полученным за месяц, среднее потребление электроэнергии электродвигателя насоса с использованием преобразователя частоты и без него указаны в таблице 1. Как видно из таблицы 1 применение преобразователя частоты позволяет уменьшить до минимума затраты на оплату электроэнергии. Разница потребления электроэнергии составляет:   МВт∙ч МВт∙чС учетом тарифа на электроэнергию получим:   руб; руб; где  – количество электроэнергии, сэкономленной при использовании преобразователя частоты, МВт/ч; – количество электроэнергии, сэкономленной при использовании преобразователя частоты, МВт/ч;Т – тариф, руб/кВт∙ч. Таблица 8.1
Применение преобразователя частоты влечет за собой отказ от использования задвижки, как средства регулирования. Это в свою очередь приводит практически к полному исключению возникновения кавитации, так как на входе насоса повышается давление подачи. Когда насос работает с большим отклонением от расчетного режима с частично закрытой задвижкой на поглощающем трубопроводе, затраты утечек через уплотнение между рабочим колесом и корпусом увеличивается (из-за увеличения перепада давления между полостями всасывания и нагнетания). По причине высокой скорости жидкости в уплотнении вполне вероятно возникновение кавитационных явлений, собственно что может привести к нарушению рабочего колеса и корпуса насоса. При резком падении давления в зоне рабочего колеса насоса появляется вакуум, вода при невысоком давлении начинает вскипать, при этом напор быстро снижается. Режим кавитации приводит к эрозии рабочего колеса насоса, и насос выходит из строя. Также очень сильно кавитационному разрушению подвержены чугун и углеродистая сталь. В трубопроводе же давление потока может уменьшится до критического, поэтому в сплошном потоке появляются множественные пузырьки паров и газов, которые выделяются жидкостью, которые под воздействием разряжения растут до больших пузырей каверн. Попадая вслед за тем в области с давлением выше критического, эти каверны лопаются и бесследно пропадают в результате конденсации. Захлопывание пузырей происходит довольно быстро и сопровождается гидравлическими ударами, которые ведут к кавитационной эрозии, механически повреждающей внутреннюю плоскость трубопровода. Кавитация сокращает КПД, напор и производительность насоса. При сильном развитии кавитации центробежный насос всецело прекращает работу (срывает подачу). Долгая работа насоса при наличии даже малозначимых кавитационных явлений абсолютно недопустима. Особенно сильно при кавитации разрушаются детали насосов, в случае если перекачивается вода, имеющая твердые включения. Применение преобразователей частоты в регулируемом электроприводе является необходимой мерой по повышению качества регулирования в широком диапазоне, приводит к увеличению производительности технологического комплекса, способствует значительной экономии электроэнергии и материальных средств. 8.4. Применение регулируемого электропривода Регулируемый электропривод - основной вид автоматизированного электропривода Применение регулируемого электропривода в составе технологических машин и агрегатов обычно связано с одним из следующих обстоятельств: - потребность оперативного управления ходом технологического процесса (электроприводы грузоподъемных кранов, экскаваторов, реверсивных прокатных станов и других машин); - потребностью устанавливать и точно выдерживать технологический режим (электроприводы станов непрерывной прокатки, бумагоделательных машин, отделочных агрегатов текстильной промышленности и др.); - потребностью корректировки технологического процесса (электроприводы питателей, дозаторов и др.); - автоматическим управлением режимом обработки груза (электроприводы станков с ЧПУ и др.); - стремление оптимизировать технологический процесс по затратам электроэнергии (электроприводы насосов, вентиляторов, компрессоров). Приведенный перечень обстоятельств, которые поясняют потребность или целесообразность применения регулируемого электропривода, может быть увеличен и более подробно описан. По мере развития рабочих машин и механизмов, использование высоких технологий необходимость в регулируемых электроприводах существенно возросла, и автоматизированный регулируемый электропривод составляет энергетическую и кибернетическую (с точки зрения управления) основу большого количества рабочих машин и агрегатов во всех технологических областях. Автоматизированный электропривод выполняет 2 технологические функции: - преобразование электрической энергии в механическую, которая является необходимой для осуществления данного технологического процесса; - управление технологическим процессом, причем с определенной степенью оптимизации этого процесса по ряду критериев, таких как: обеспечение максимальной производительности, точности и качества обработки, минимального расхода энергии и т.п.; конкретные задачи управления многообразны и определяются характером технологического процесса. Вторая функция автоматизированного электропривода всеобще связана с потребностью регулирования величин, которые описывают движение электропривода (скорости, момента, положения рабочего органа). Выполнение этой функции имеет месть быть только посредством использования регулируемого электропривода. Использование для целей регулирования механических или гидравлических средств (вариаторы, коробки передач, гидромуфты и др.) на сегодняшний момент является технически и экономически неоправданным. Под регулируемым электроприводом понимается электропривод, который обеспечивает плавное с установленной точностью регулирование скорости (или момента) в заданном диапазоне. Несмотря на это, требования к регулируемому электроприводу на этом не заканчиваются. Система управления регулируемого электропривода обязана обеспечивать также заданный характер переходных процессов при изменении скорости, момента или других параметров электропривода. Поскольку по своим электромеханическим свойствам электродвигатели в естественной схеме включения в питающую сеть не могут обеспечить регулирование параметров движения электропривода с необходимым качеством, для создания регулируемого электропривода приходится преобразовывать электрическую энергию, которая подводится к (или отводится от) двигателя. Преобразование электрической энергии осуществляется с помощью полупроводниковых преобразователей. Регулируя параметры преобразованной электрической энергии (частоту, напряжение, форму и длительность импульсов и др.) удается получить требуемые для регулируемого привода механические и динамические характеристики. Для управления параметрами (напряжение, частота и др.) полупроводниковых преобразователей, входящих в состав регулируемого электропривода, служат внутренние контуры автоматического регулирования -это регуляторы тока, э.д.с., тока возбуждения и др. В этом смысле регулируемый электропривод всегда является автоматизированным, т.к. содержит средства автоматического управления, формирующие характеристики электропривода. Внешние контуры регулирования определяют переменные, которые описывают движения электропривода: скорость или положение рабочего органа. Обычно эти контуры регулирования являются замкнутыми, т.е. содержат отрицательную обратную связь по регулируемому параметру и соответствующий регулятор. Типичная схема замкнутого контура регулирования скорости представлена на рис.4. 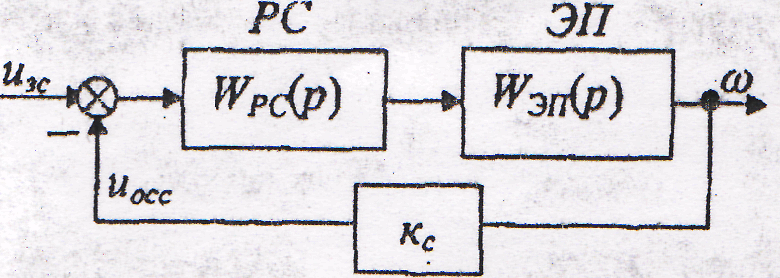 Рисунок 8.2. Структурная схема контура регулирования скорости изс - задание скорости; иосс - сигнал обратной связи по скорости; РС - регулятор скорости с передаточной функцией  ; ;  - коэффициент обратной связи по скорости; - коэффициент обратной связи по скорости;  - передаточная функция электропривода с внутренним контуром регулирования. - передаточная функция электропривода с внутренним контуром регулирования.Задание на скорость изсможет формироваться вручную - машинистом экскаватора, крановщиком, оператором и др., или автоматически - от системы числового программного управления (системы ЧПУ в приводе станков), от технологических регуляторов или управляющих устройств верхнего уровня автоматизации. Передаточная функция регулятора скорости выбирается такой, чтобы обеспечить необходимое качество регулирования по статическим (диапазон, точность) и по динамическим показателем (быстродействие, перерегулирование, колебательность).Двигатели, полупроводниковые преобразователи электрической энергии, датчики и устройства автоматического регулирования в своей совокупности образуют систему регулируемого электропривода. Эти системы различаются, прежде всего, по виду приводного электродвигателя, а также по виду используемых полупроводниковых преобразователей электрической энергии, питающих двигатель. Регулирование скорости - это принудительное, благодаря системе управления, изменение скорости, исходя из требований технологического процесса. Это регулирование происходит в случае подачи на вход системы регулирования управляющего воздействия. Однако регулирование скорости может происходить и при неизменном управляющем воздействии, когда задача регулирования состоит в стабилизации скорости при появлении возмущающих воздействий, например при изменении нагрузки, которая прикладывается к валу электродвигателя. Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту f1 питающего напряжения, можно в соответствии с выражением  при неизменном числе пар полюсов p изменять угловую скорость магнитного поля статора. Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании малы. Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки Мс=const напряжение на статоре должно регулироваться пропорционально частоте: Для вентиляторного характера момента нагрузки это состояние имеет вид:  При моменте нагрузки, обратно пропорциональном скорости:  Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты обязан обеспечивать одновременное регулирование частоты и напряжения на статорной обмотке асинхронного двигателя. 8.5. Преимущества использования регулируемого электропривода в технологических процессах Применение регулируемого электропривода обеспечивает энергосбережение и позволяет получать новые качества систем и объектов. Значительная экономия электроэнергии происходит за счет регулирования какого-либо технологического параметра. Если это транспортер или конвейерная установка, то можно регулировать скорость его движения. Если это насос или вентилятор – можно поддерживать давление или регулировать производительность. Если это станок, то можно плавно регулировать скорость подачи или главного движения. Главный экономический эффект от использования преобразователей частоты дает использование частотного регулирования на объектах, которые обеспечивают транспортировку жидкостей. До сих пор наиболее распространённым способом регулирования производительности таких объектов является использование задвижек или регулирующих клапанов, но сегодня доступным становится частотное регулирование асинхронного двигателя, которое приводит в движение, например, рабочее колесо насосного агрегата или вентилятора. При использовании частотных регуляторов обеспечивается плавная регулировка скорости вращения, что позволяет во многих случаях отказаться от использования редукторов, вариаторов, дросселей и другой регулирующей аппаратуры. При подключении через частотный преобразователь пуск двигателя происходит плавно, без пусковых токов и ударов, что снижает нагрузку на двигатель и механизмы, тем самым увеличивает срок их службы. Перспективность частотного регулирования наглядно видна из рис. 8.3.  Рисунок 8.3. Потребление мощности при различных способах регулирования Таким образом, при дросселировании поток вещества, сдерживаемый задвижкой или клапаном, не совершает полезной работы. Применение регулируемого электропривода насоса или вентилятора позволяет задать нужное давление или расход, что позволит не только экономить на электроэнергии, но и снизит потери транспортируемого вещества. 8.6. Структура частотного преобразователя Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления. Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока. Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя. В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. 8.7. Принцип работы преобразователя частоты Преобразователь частоты состоит из неуправляемого диодного силового выпрямителя В, автономного инвертора, системы управления ШИМ, системы автоматического регулирования, дросселя Lв и конденсатора фильтра Cв. Регулирование выходной частоты fвых. и напряжения Uвых осуществляется в инверторе за счет высокочастотного широтно-импульсного управления. Широтно-импульсное управление характеризуется периодом модуляции, внутри которого обмотка статора электродвигателя подключается поочередно к положительному и отрицательному полюсам выпрямителя. Длительность этих состояний внутри периода ШИМ модулируется по синусоидальному закону. При высоких (обычно 2…15 кГц) тактовых частотах ШИМ, в обмотках электродвигателя, вследствие их фильтрующих свойств, текут синусоидальные токи. 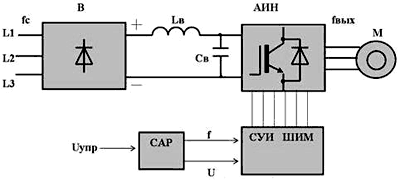 Рисунок 8.4. Структурная схема работы преобразователя частоты Таким образом, форма кривой выходного напряжения представляет собой высокочастотную двухполярную последовательность прямоугольных импульсов (рис. 8.5). 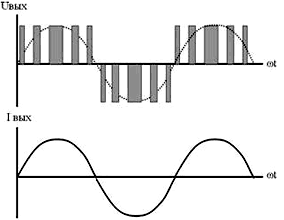 Рисунок 8.5. Форма кривой выходного напряжения Частота импульсов определяется частотой ШИМ, длительность (ширина) импульсов в течение периода выходной частоты АИН промодулирована по синусоидальному закону. Форма кривой выходного тока (тока в обмотках асинхронного электродвигателя) практически синусоидальна. Регулирование выходного напряжения инвертора можно осуществить двумя способами: амплитудным (АР) за счет изменения входного напряжения Uв и широтно-импульсным (ШИМ) за счет изменения программы переключения вентилей V1-V6 при Uв = const. Второй способ получил распространение в современных преобразователях частоты благодаря развитию современной элементной базы (микропроцессоры, IBGT-транзисторы). При широтно-импульсной модуляции форма токов в обмотках статора асинхронного двигателя получается близкой к синусоидальной благодаря фильтрующим свойствам самих обмоток. Такое управление позволяет получить высокий КПД преобразователя и эквивалентно аналоговому управлению с помощью частоты и амплитуды напряжения. Современные инверторы выполняются на основе полностью управляемых силовых полупроводниковых приборов – запираемых GTO – тиристоров, либо биполярных IGBT-транзисторов с изолированным затвором. На рис. 8 представлена 3-х фазная мостовая схема автономного инвертора на IGBT-транзисторах. Она состоит из входного емкостного фильтра Cф и шести IGBT-транзисторов V1-V6 включенными встречно-параллельно диодами обратного тока D1-D6. За счет поочередного переключения вентилей V1-V6 по алгоритму, заданному системой управления, постоянное входной напряжение Uв преобразуется в переменное прямоугольно-импульсное выходное напряжение. Через управляемые ключи V1-V6 протекает активная составляющая тока асинхронного электродвигателя, через диоды D1-D6 – реактивная составляющая тока. 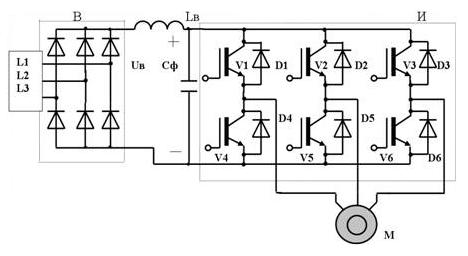 Рисунок 8.6. 3-х фазная мостовая схема автономного инвертора на IGBT-транзисторах. И – трехфазный мостовой инвертор; В – трехфазный мостовой выпрямитель; Сф – конденсатор фильтра; 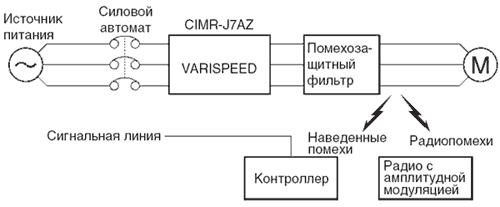 Рисунок 8.7. Вариант схемы подключения частотного преобразователя фирмы Omron. 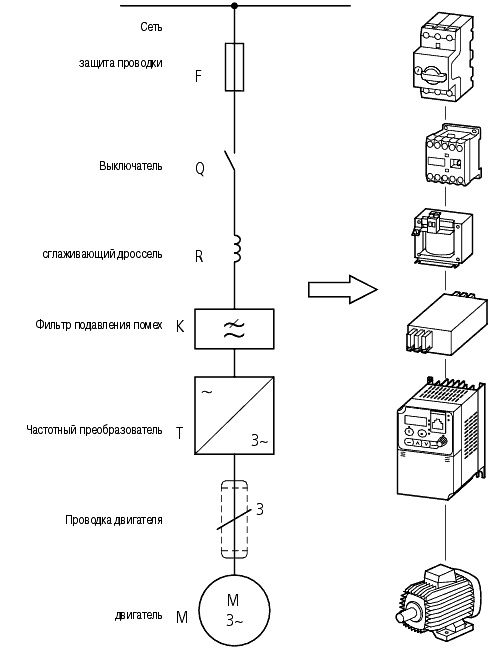 Монтаж и подключение с соблюдением требований ЭМС подробно описаны в соответствующих руководствах на устройства. |