Курсовая работа Миронович1. Задача организации перевозок Составление моделей транспортной сети Алгоритм расчета кротчайших расстояний Выбор подвижного состава Сравнительная оценка подвижного
 Скачать 1.36 Mb. Скачать 1.36 Mb.
|

5 Определение потребного количества и выбор погрузо- разгрузочных механизмов При выборе ПРМ учитывают условия работы грузопункта, род и объем перевозимого груза, а также тип подвижного состава. Следует иметь в виду, что стационарные (полустационарные механизмы применяют только при массовых перевозках и стабильном грузообороте). Для погрузки массовых навалочных грузов служат экскаваторы, емкость ковша которых зависит от грузоподъемности автомобилей. Таблица 5.1 Соотношение грузоподъемности автомобиля и емкости ковша экскаватора
Производительность экскаватора W, т/ч, определяют по формуле: Для грунта W = KнNqэ=1 Для щебня W = KнNqэ=0,5 Таблица 5.2 Число рабочих циклов N, выполняемых экскаватором в течение часа при непрерывной работе в однородных грунтах
Тип ПРМ размеры грузовой площадки обуславливают способ постановки подвижного состава под погрузку-разгрузку. Выбираем торцевой, когда в сторону расположения груза обращен задний борт автомобиля (предпочтителен при эксплуатации одиночных автомобилей) рисунок 5.1 и 5.2. 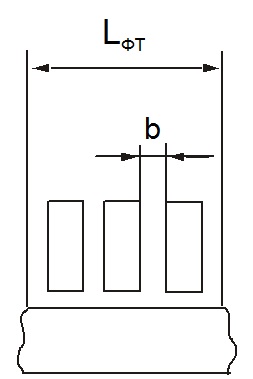 Рис.5.1 - Торцевая схема фронтов погрузки – разгрузки 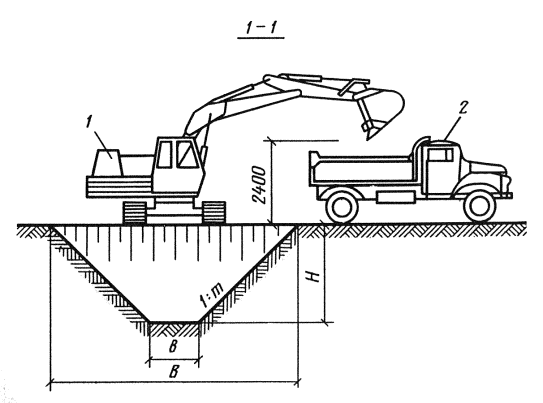 Рис. 5.2 - Схема погрузки грунта на автомобиль-самосвал экскаватором, оборудованным «обратной лопатой» Необходимое количество ПРМ в грузовом пункте можно определить по формуле: Для грунта Хп(р)=qн*γс/WJ=13*1/336*0.3=0,131 Для щебня Хп(р)=qн*γс/WJ=13*1/256*0.3=0,171 В соответствии с выбранным подвижным составом, ПРМ и их относительным расположением в зоне проведения грузовых работ рассчитывают общую длину грузового фронта: Для грунта Lфт=Хп(р)(lb+b)+b=1*(2,5+1.5)+1.5= 5,5м (5.3) Для щебня Lфт=Хп(р)(lb+b)+b=1*(2,5+1.5)+1.5= 5,5м где Lфп - фронт погрузки(разгрузки) при торцевой постановке автомобилей, м; lb - габаритная ширина автомобиля, lb=2,5м; b - расстояние между соседними автомобилями, (1,5м). Необходимым условием для любого грузопункта является равенство ритма его работы интервалу поступления автомобилей на грузопункт: Rп(р)=J, мин (5.4) где Rп(р) - ритм пункта погрузки (разгрузки), мин; J - интервал движения подвижного состава, мин. Rп(р)=J=18, мин Равенство (5.4) в теории обуславливают равномерную загруженность грузопункта и исключает непроизводительные простои подвижного состава. На практике это не обуславливается из-за того, что транспортный процесс носит случайный характер. В результате наблюдаем неравномерное поступление автомобилей в грузовые пункты и непостоянное время выполнение погрузо-разгрузочных работ. Учесть случайный характер транспортного процесса можно, если ввести в формулу (5.2) коэффициент неравномерности поступления автомобилей, т.е. количество постов погрузки-разгрузки определяется так: Хп(р)=qн*γс*η /WJ, (5.5) Для грунта Хп(р)= 13*1*0,7/336*0.3=0.081 Для щебня Хп(р)= 13*1*0,8/256*0.3=0,131 Таблица 5.3 -Характеристик грузопунктов по маршрутам
6 Составление рациональных маршрутов перевозок грузов Рассмотрим метод маршрутизации перевозок грузов, основанный на транспортной задаче. На первом этапе определяем оптимальный план возврата порожняка. Для удобства объем перевозок в тоннах переведем в ездки по формуле (6.1). Результаты расчетов сводим в таблицу 6.1. Zп=Zг=Qг/Др где Zп,Zг - число порожних и груженых ездок; yс =1. Таблица 6.1 - Заданный план перевозок грузов, ездки
Построим первоначальный допустимый план Х1 с базисом S1. Для этого таблицу 6.1, преобразуем в таблицу 6.2, учитывая, что Г15, Г17, Г18, Г6 являются потребителями, а Г15,Г18,Г20,Г21,Г19,Г1,Г2,Г3,Г16,Г11 и Г7 - поставщиками порожних автомобилей. Построение первоначального плана X1 произведем методом минимального элемента. В табл. 6.1 находим клетку с наименьшим расстоянием. Таблица 6.2 - Исходный план движения порожняка, ездки
Такой будет клетка (1,1} (С1,1 = 0). В качестве первой базисной поставки выберем наименьшее из значений четвертой строки и третьего столбца:
Занесем х1,1 = 2 в клетку (1,1) .Скорректируем значение величины а4 и b3 после определения базисной переменной х1,1 = 2:
Из оставшихся клеток снова выбираем клетку с наименьшим расстоянием. Эта клетка (1,1). Определим для нее значение базисной переменной:
Заносим х1,2 = 2 в клетку (1.1). Скорректируем значения а и б:
Рассуждая аналогичным образом, заканчиваем построение первого допустимого плана возврата порожняка (табл. 6.2) Затем проверяем на оптимальность, для этого используем потенциал, для загруженных клеток. Пi+Пj=lij Загруженной считается клетка, в которой записана поставка от поставщика к получателю. Расчетов потенциалов заключается в том, что мы анализируем строчки или столбцы с известным потенциалом и через загруженные клетки рассчитываем потенциал строки или столбца. Для потенциальной клетки строим контур таблица 6.3. Таблица 6.3 – Расчет потенциалов
Продолжение таблицы 6.3
Окончание таблицы 6.3
Таблицы 6.4 – Оптимальный план перевозок
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||