Курсовая работа по Технической оснастке. Пояснительная записка. 1. 1 Конструкция и служебное назначение изготавливаемой детали 3
 Скачать 0.8 Mb. Скачать 0.8 Mb.
|

2. Специальный раздел2.1 Разработка технического задания на проектируемое приспособление 1) Наименование и область применения: Приспособление для фрезерования шпон-паза на детали «Вал» Фрезерование на вертикально-фрезерном станке (025 операция) 2) Цель и назначение разработки: Проектируемое приспособление по оценкам должно обеспечить: - Наиболее точную установку и надежное закрепление, постоянство нахождение заготовки в вертикальном положении относительно стола и шпинделя для достижения необходимой точности размера, и допуска. - Быстроту, точность и удобство установки в приспособлении, закрепления и снятия заготовки. - Экономию времени на обработку необходимой поверхности в приспособлении - Обеспечение экономически-выгодных показателей для обеспечения снижения себестоимости продукции изделия. 3) Технические требования: Тип производства: Среднесерийное Программа выпуска: 13 546 штук Установочные и соединительные элементы конструкции приспособления должны соответствовать станку 6Р81 Любые регулировки приспособления не допускаются. Время закрепления заготовки в приспособлении не должно превышать 0.5 минуты Уровень унификации и стандартизации деталей приспособления: 60% 4) Документация, используемая при разработке ЕСТПП: "Правила выбора технологической оснастки" ГОСТ 14305-73 "Виды и комплектность конструкторских документов" ГОСТ 2102-68 ЕСКД "Правила выполнения чертежей" 5) Документация, подлежащая разработке: Пояснительная записка. Маршрутная карта технологического процесса детали Операционный технологический процесс на заданную операцию Рабочий чертёж в проекциях с необходимыми разрезами, сечениями, техническими требованиями, спецификацией. Чертёж детали. 2.2. Эскизная проработка конструкции приспособленияРазрабатывая приспособление, перед мной встала задача эскизно проработать некоторые сборочные единицы приспособления. Проанализировав условия обработки детали, а также особенности станка, целесообразнее было выбрать приспособление на основании поворотного стола, но с некоторыми модификациями. Исходя из этих данных, эскизно проработаем наиболее ответственные сборочные единицы приспособления: 1) Втулка;  Рис. 3. Втулка 2.3 Проверка условия базирования по шести степеням свободыСогласно теоретической механике требуемое положение или движение твердого тела относительно выбранной системы координат достигается наложением геометрических или кинематических связей. При наложении геометрических связей тело лишается трех перемещений вдоль осей OX , OY и OZ и трех поворотов вокруг этих осей, т.е. тело становится неподвижным в системе OXYZ. Во втором случае связями обеспечивается задано положение тела в системе OXYZ в каждый рассматриваемый момент времени. Наложение двухсторонних геометрических связей достигается через соприкосновение поверхностей тела с поверхностями других тел (другого тела), к которым (которому) оно присоединяется, и приложения сил и пар сил для обеспечения контакта между ними. Шесть связей, лишающих тело движения в шести направлениях, могут быть созданы контактом соединяемых тел в шести точках. В случае идеализации формы поверхностей считается, что осуществление необходимых связей достигается контактом тел по поверхностям, а наличие реальных связей символизируется опорными точками, имеющими теоретический характер. Для придания положения телу с использованием его плоскостей симметрии или осей поверхностей связи должны быть наложены непосредственно на плоскости симметрии, оси, линии или точки их пересечения. В теоретической механике рассматривается определение положения тела относительно избранной системы координат OXYZ через определение положения связанной с ним системы координат O1X1Y1Z1. Жесткая связь системы O1X1Y1Z1 с телом дает возможность отнести связи, налагаемые на тело, к системе O1X1Y1Z1. При рассмотрении вопросов базирования целесообразно координатные плоскости системы O1X1Y1Z1 строить на базах тела таким образом, чтобы одна из них, принимаемая за начало отсчета (рекомендуется X1,O1,Y1 ) , была лишена одного перемещения и двух поворотов, другая (X1,O1,Z1) – была перпендикулярна к X1O1Y1 и лишена одного перемещения и одного поворота, третья (X1O1Z1) - была перпендикулярна к X1O1Y1 и X1O1Z1 и лишена одного перемещения. Из требований к относительному положению координатных плоскостей следуют требования к относительному положению баз, входящих в состав комплекта и представляющих систему O1X1Y1Z1. В зависимости от характера и условий решаемой задачи координатные плоскости системы O1X1Y1Z1. Либо представляются мысленно, либо материализуются точками контакта или непосредственно поверхностями тела, используемыми в качестве баз, либо создаются комбинированным способом. Рисунок 5. Схема лишения степеней свободы детали 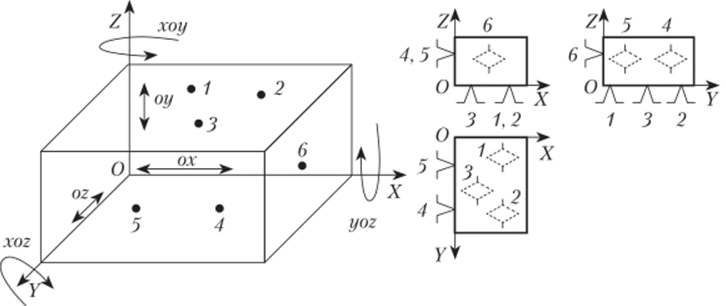 |