основы технической механики. 1.1 Основы технической механики. 1. 1 Основы технической механики
 Скачать 1.67 Mb. Скачать 1.67 Mb.
|

МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ОСИ К твердому телу в точке A приложена сила F. Проведем в пространстве ось (например z). На оси z произвольно выберем точку O. Соединим точку Oс точкой А радиус-вектором. Через точку Oпроведем плоскость П перпенди-кулярную оси z. Спроектируем вектора Fи rна плоскость П . К твердому телу в точке A приложена сила F. Проведем в пространстве ось (например z). На оси z произвольно выберем точку O. Соединим точку Oс точкой А радиус-вектором. Через точку Oпроведем плоскость П перпенди-кулярную оси z. Спроектируем вектора Fи rна плоскость П . Моментом силы F относительно оси называется вектор равный моменту проекции силы F на плоскость П относительно точки O Моментом силы F относительно оси называется вектор равный моменту проекции силы F на плоскость П относительно точки Oпересечения оси z с плоскостью П (Рис. 1.16) 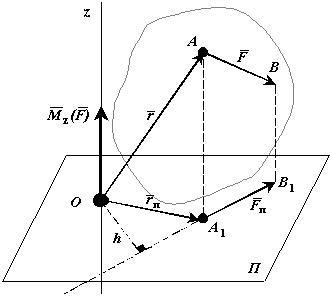 Рис. 1.16. Момент силы относительно оси. Mz(F ) M0 (FП) rП FП Mz(F) FП rП sin(rП,FП) FП h Свойства момента силы относительно оси: Момент силы относительно оси равен нулю, если сила параллельна оси. В этом случае равна нулю проекция силы на плоскость, перпендикулярную оси. Момент силы относительно оси равен нулю, если линия действия силы пересекается с осью. В этом случае равно нулю плечо силы. СВЯЗЬ МОМЕНТА СИЛЫ ОТНОСИТЕЛЬНО ОСИ С МОМЕНТОМ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИПроведем через точку O, где задан момент силы относительно точки декартовы оси координат x,y,z. Момент силы M0(F) относительно точки можно представить в виде суммы трех векторов M0 (F) Mx(F) My(F) Mz(F) . Эти вектора являются моментами силы относительно осей x,y,z соответственно: Mx(F ) M0 x(F )i My(F) M0 y(F) j Mz(F) M0 z(F) k Момент силы относительно оси равен проекции на эту ось момента силы относительно любой точки на оси.
относительно осей координат, то моменты силы относительно осей координат вычисляется следующим образом: Mx( F ) M0 x( F ) ( y Fz z Fy)My (F ) M0 y( F ) (z Fx x Fz) Mz(F ) M0 z(F ) (x Fy y Fx) |
