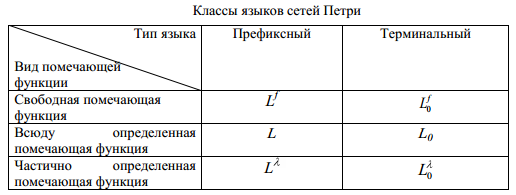
35. Классы языков сетей Петри. Пример.
Пусть N – класс всех СП. На основе введенных ранее понятий и видов помечающих функций (свободная ПФ, всюду определенная ПФ и частично определенная ПФ) можно образовать следующие классы языков СП.
В данном случае верхний индекс λ :ПФ могут быть частично определенными, то есть сеть может содержать λ-переходы.
Верхний индекс f означает, что используются свободные ПФ.
Нижний индекс 0 означает, что рассматриваются терминальные языки.
|
|
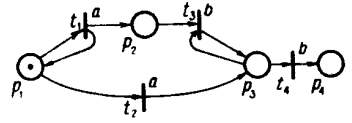
Рассмотрим СП с различными вариантами помечающей функции, для каждой найдем префиксный и терминальный языки (Рис. 41).
|
|
Пусть μ0=(1000), μt=(0001).
Допустимые последовательности запусков: 1) t2t4; 2) (t1 ...t1) t2 (t3 ...t3) t4
n1 раз n2 раз
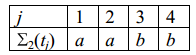
Варианты помечающей функции:
Свободная ПФ – Σ1(tj)=tj.
Префиксный язык:L(C)={t2, t2t4, t1n1, t1n1t2, t1n1t2t3n3, t1n1t2t3n3t4:n1 1,n1n3}={t1n1t2n2t3n3t4n4: 0≤n1, 0 1,n1n3}={t1n1t2n2t3n3t4n4: 0≤n1, 0 n21, 0n3n2*n1, 0n4n2}. n21, 0n3n2*n1, 0n4n2}.
Терминальный язык: L(C, μ0, μt)={t1nt2t3nt4 ,t2t4:n N0}. N0}.
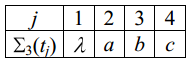
3) Пусть Σ3 - частично определенная помечающая функция, сеть содержит λ-переходы
|
|
Префиксный язык: L(C, Σ3) ={an1bn2cn3: 0n11, (n1=0→n2=0), (n1=1→n2=1), 0n3n1}.
Терминальный язык: L(C, Σ3, μ0, μt) ={abnc: n≥0}.
| |
 Скачать 0.51 Mb.
Скачать 0.51 Mb.