земельный кадастр билеты госы. 2. Современная философия науки, её предмет и особенности
 Скачать 0.81 Mb. Скачать 0.81 Mb.
|

Приемники, используемые в спутниковой геодезии
К первой группе относят приемники, работающие по принципу последовательного (поочередного) отслеживания и измерений расстояний до навигационных спутников рабочего созвездия. Ко второй группе, – приемники, отслеживающие и обеспечивающие измерение расстояний одновременно до четырех и более навигационных спутников, т. е. ведущие измерения параллельно. Внутри каждой из этих двух групп существует большое разнообразие приемников различного назначения и конструктивных особенностей. Одноканальные приемники, наиболее экономичные и дешевые, используют в тех случаях, когда не требуется вести измерения «в режиме реального времени», т. е. непрерывно и не требуются измерения скорости объекта, на котором установлен приемник. Прежде чем вычислить координаты местоположения, одноканальный приемник должен выполнить последовательно четыре отдельных измерения до четырех различных спутников. Вся операция по определению координат одной точки может занимать от 2 до 30 с, что во многих случаях может оказаться вполне приемлемым. Тем не менее одноканальным приемникам свойственны некоторые недостатки: с помощью такого приемника нельзя производить измерения с подвижного объекта (например, с автомобиля при кинематической съемке плана и продольного профиля автомобильной дороги); в ходе каждого цикла из четырех измерений приемник должен оставаться неподвижным; работа одноканальных приемников по определению координат прерывается в моменты, когда навигационные спутники передают свои информационные сообщения, прием и расшифровка каждого из которых занимает около 30 с. Двухканальные приемники работают по следующему принципу. Когда один канал приемника производит обработку результатов временных измерений до одного спутника, другой канал устанавливает радиоконтакт с очередным спутником для проведения измерений. Закончив цикл частичной обработки данных, первый канал мгновенно переключается на измерения до очередного спутника без потери времени на его «захват» и «прослушивание». Тем временем второй канал, называемый административным, обращается к следующему спутнику и т. д. Административный канал используется для приема информационных сообщений спутников без прерывания процесса определения координат местоположения и может быть использован для обработки временных измерений. Кроме того, современные двухканальные приемники программируются для слежения за более чем четырьмя спутниками и в тех случаях, когда за одним из рабочих спутников теряется контроль, мгновенно используется другой, без перерыва процесса определения координат. Все это существенно ускоряет работу приемников. Многоканальные приемники (непрерывного слежения). Такие приемники одновременно отслеживают 4 и более спутников. Многоканальные приемники, используемые при производстве инженерно-геодезических работ, могут иметь 4, 6, 8, 10, 12 и даже 24 канала слежения. Кроме очевидного преимущества – непрерывного определения координат в режиме реального времени, скорости и траектории движения, многоканальные приемники могут обрабатывать сигналы всех спутников рабочего созвездия, видимых в настоящий момент на небосклоне, а некоторые приемники одновременно и спутников разных орбитальных систем: NAVSTAR (США) и ГЛОНАСС (Россия). Одночастотные и двухчастотные приемники. Кроме приемников (одно/двухканальных и многоканальных), работающих на одной частоте радиоволн, в практике инженерно-геодезических работ используют и многоканальные двухчастотные приемники, работающие с использованием кодов на двух частотах: 1575,72 МГц и 1227,6 МГц. Приемники такого уровня обеспечивают более точное определение координат точек местности, в связи с возможностью дифференцированного учета для каждого рабочего спутника ионосферных и тропосферных задержек, а также обеспечивают быструю инициализацию (присваивание начальных значений) приемника, что особенно актуально в местах, где могут часто блокироваться сигналы спутников. Основное преимущество двухчастотных приемников – возможность сократить время наблюдений на пунктах (до 20 раз) с сохранением высокой точности измерений. По точности определения координат и назначению различают приемники следующих классов: навигационного класса с точностью определения координат 150 – 200 м; класса картографии и ГИС с точностью определения координат 1 – 5 м; геодезического класса с точностью определения координат до 1 см. Приемники навигационного класса дешевы и компактны (рис. 18). Они призваны решать главным образом навигационные задачи на транспорте, в народном хозяйстве (например, при поиске полезных ископаемых и т. д.) и отдыхе.
Приемники класса точности картографии и ГИС также относительно дешевы и доступны проектно-изыскательским и строительным организациям (рис. 19). Их точность может быть существенно повышена в случае применения базовых станций (см. ниже п. 3.9) и они могут быть использованы при решении большинства инженерно-геодезических задач, включая задачи, решаемые в режиме реального времени (например, съемка плана и продольного профиля существующей автомобильной дороги с движущегося автомобиля). Приемники геодезического класса точности весьма недешевы, однако даже в автономном режиме работы обеспечивают определение координат точек местности с точностью до 1 – 3 см в кинематическом режиме и до 1 см при статических измерениях, и поэтому применимы для решения практически любых инженерно-геодезических задач. В качестве примера на рис. 20 представлена обобщенная структурная схема GPS-приемника. Антенна может быть встроена в приемник либо быть в виде модуля, подключаемого к приемнику с помощью коаксиального кабеля. Мощность передатчика, установленного на спутнике, сравнительно невелика (около 10 Вт), и поэтому принимаемый сигнал очень мал. Усиление сигнала осуществляется с помощью СВЧ предусилителя, который, как правило, встроен в корпус антенны. Антенны бывают одночастотные, настроенные на частоту L1, либо двухчастотные для приема частот L1 и L2. 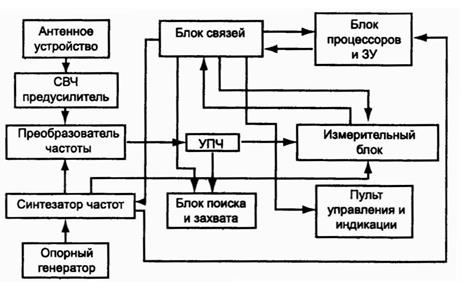 Рис. 20. Обобщенная структурная схема GPS-приемника Наряду с диаграммами направленности важным показателем антенного устройств спутникового приемника является понятие фазового центра, его положение и стабильность этого положения с течением времени. Фазовый центр антенны является определяемой точкой, поэтому предусмотрена возможность ее центрирования на станции. При этом под фазовым центром понимают ту неподдающуюся геометрическим измерениям точку в антенной системе, от которой отсчитываются все измеряемые до спутников расстояния, а ее положение «привязывается» к центру знака на пункте наблюдения. Антенны, как правило, выполнены в виде полусферы, что позволяет в идеальном случае обеспечивать одинаковую задержку по фазе для радиоволн, приходящих с разных сторон. В действительности все же наблюдается зависимость величины фазовой задержки от направления на спутник, и поэтому для каждой антенны такую зависимость (диаграмму направленности) определяют в заводских условиях. Для высокоточных геодезических спутниковых приемников уклонения реальной фазовой характеристики антенны от идеальной обычно не превышают 5 – 10 градусов, что соответствует ошибкам в определении расстояний на уровне около 3 – 5 мм. При этом на корпус антенны наносят метку, по которой ее ориентируют на север, что позволяет учитывать заводскую характеристику антенны. Чтобы уменьшить влияние радиосигналов, отраженных от подстилающей поверхности и различных местных предметов, используют экранирующие диски, установленные под антенной. Для усиления мощности принятого сигнала служит усилитель, который подключен, как и синтезатор частот, к преобразователю частоты. Принимаемые колебания после предварительного усиления подвергаются преобразованиям, вследствие чего понижается частота несущих колебаний до нескольких десятков мегагерц, т. е. применяется супергетеродинный принцип приема. Синтезатор частот работает от высокостабильного опорного кварцевого генератора, входящего в состав приемника. В результате преобразователь частоты понижает частоту несущих колебаний до частоты биений в несколько десятков МГц, которые усиливаются в усилителе промежуточной частоты (УПЧ). С УПЧ сигналы поступают в измерительный блок и блок поиска и захвата, который осуществляет поиск сигнала на основе кодово-корреляционных методов и отслеживание в течение всего сеанса наблюдений. В измерительном блоке сигналы разделяются на кодовые и гармонические, а также сигналы навигационного сообщения. Полученные из кодовых сигналов значения псевдодальностей используются для грубого определения координат и вектора скорости перемещения подвижного объекта, на котором установлен приемник. В камеральных условиях на стадии «постобработки» производится окончательная обработка фазовых измерений. Блок процессоров осуществляет управление предварительными вычислениями и работой приемника в автоматическом режиме на основе заложенного в него программного обеспечения. Регистрация отсчетов производится с высокой частотой (как правило, через 0,1 с) с выполнением последующей корректировки, обусловленной изменениями измеряемых дальностей, вызванных быстрыми перемещениями спутников. Полученные данные подвергаются сглаживанию и уплотнению, в результате чего образуются выборки, интервал между которыми находится в пределах от 1 до 60 с и может изменяться по желанию оператора. Пульт управления и индикации включает в себя буквенно-цифровую клавиатуру и индикаторное табло. На нем по желанию оператора могут отображаться определяемые с помощью приемника величины, а также другая вспомогательная информация. Информация о местоположении определяемой точки отображается на экране дисплея непосредственно в процессе сеанса наблюдений, а клавиатура позволяет оператору вводить необходимую информацию и различного роде команды, связанные с управлением работой приемника. В процессе работы в приемнике производится предварительная обработка получаемой информации и ее регистрация с помощью тех или иных запоминающих устройств, выполняется самодиагностика правильности функционирования приемника, контролируются источники питания, и выполняется целый ряд других операций. Для этих целей служит встроенная специализированная микроЭВМ, включающим в себя процессоры, таймер, различные запоминающие устройства (ОЗУ и ПЗУ), интерфейсные платы для стыковки с пультом управления и индикации, с внешней регистрирующей аппаратурой и т. п. Управление осуществляется с помощью пульта управления и индикации, согласно вводимой в приемник программы. Геодезические спутниковые приемники обеспечивают высокую точность измерений, имеют значительный объем внутренней памяти, которая может наращиваться и составлять 100 и более Мб, просты в обращении. Современная спутниковая аппаратура позволяет выполнять измерения в любую погоду и любое время суток, не боится воздействия пыли, влаги и газов, имеет малые габариты и вес, малочувствительна к ударам. Высокая точность определения координат позволяет с успехом использовать спутниковые методы для решения широкого спектра геодезических задач. Основные методы измерений По мере накопления опыта использования спутниковых радионавигационных систем были отработаны различные методы определения местоположения (координат) точек земной поверхности (пунктов). Их условная классификация представлена на рис. 21. 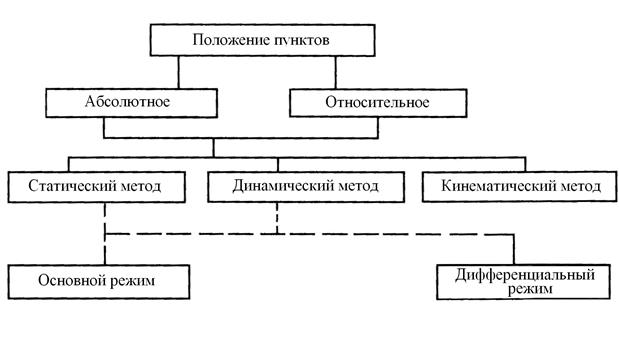 Рис. 21. Классификация методов определения положения пунктов По отношению к используемым системам координат, положение пунктов можно разделить на два класса: абсолютное, относительное. При определении абсолютного положения имеется в виду получить координаты пунктов в единой, принятой в спутниковой радионавигационной системе, координатной системе и системе времени. Наблюдения, выполняемые на одном пункте независимо от измерений на других станциях, называются автономными. Автономные наблюдения очень чувствительны ко всем источникам погрешностей, обеспечивают точность определения координат 15 – 30 м и используются для нахождения приближенных координат в точных измерениях. Под относительным положением определяемого объекта подразумевается определение положения одного объекта в системе координат другого объекта, принимаемого за исходный. При определении абсолютного положения пункта статическим методом, приемное устройство устанавливается на этот пункт и в течение достаточно продолжительного интервала времени ведутся соответствующие наблюдения. Определение относительного положения пунктов в статическом режиме предусматривает установку приемного устройства как минимум на один базовый (исходный) пункт с известными координатами с одновременными наблюдениями на определяемом пункте. При статическом позиционировании, как и при дифференциальных измерениях, приемники работают одновременно на двух станциях – базовой с известными координатами и определяемой. После окончания измерений выполняется совместная обработка информации, собранной двумя приемниками. Точность способа зависит от продолжительности измерений, которая выбирается в соответствии с расстоянием между точками. Современные приемники позволяют достичь точности определения плановых координат (5 – 10 мм) + 1 – 2 мм/км, высотных – в 2 – 3 раза ниже. Если система координат исходного пункта – абсолютная, то в результате наблюдений получают абсолютные координаты определяемого пункта. Динамический метод предполагает, что приемник, ведущий наблюдения за спутником, установлен на борту транспортного средства, которое находится в движении, при этом имеется независимая от GPS модель движения объекта. Кинематический метод отличается от динамического отсутствием внешней модели движения определяемого объекта, то есть положение или траектория движения объекта определяется исключительно по данным навигационных спутников. Кинематические измерения позволяют получать координаты точек земной поверхности за короткие промежутки времени. При этом вначале статическим способом определяют координаты первой точки, т. е. выполняют привязку подвижной станции к базовой, называемую инициализацией, а затем, не прерывая измерений, передвижной приемник устанавливают поочередно на вторую, третью и т. д. точки. Для контроля измерения завершают на первой точке либо на пункте с известными координатами, где выполняют статические наблюдения. Точность кинематического способа составляет 2 – 3 см в плане и 6 – 8 см по высоте. Если имеется цифровой радиоканал и данные с базового приемника в процессе измерений можно передавать на подвижную станцию, координаты получают в режиме реального времени, т. е. непосредственно на определяемой точке. Точность определения вектора базы, соединяющей два приемоиндикатора зависит от влияния следующих факторов: а) от аппаратурных ошибок; б) от ошибок в учете влияния внешней среды: задержки в различных слоях атмосферы, отражения радиоволн от подстилающей поверхности и окружающих объектов; в) от ошибок в эфемеридах (координатах) спутников; г) от геометрии наблюдений; д) от точности моделей, используемых при обработке результатов: математических, физических, геофизических. Перечислив источники ошибок, рассмотрим влияние наиболее существенных из них. Прежде всего отметим, что, если в качестве измеренной величины используется фаза принимаемого сигнала (величина, в геометрическом смысле эквивалентная псевдодальности), то на точность измерений в наибольшей степени влияют ошибки координат спутников и ошибки за несинхронность часов приемоиндикатора. Действительно, даже при использовании рубидиевых или цезиевых стандартов частоты, не говоря уже о используемых в приемоиндикаторах кварцевых стандартах, последний источник внесет ошибку порядка метров. Для ослабления влияния обоих источников ошибок целесообразно, как уже было сказано, использовать в качестве измеренных величин разности фазовых измерений. В частности, при использовании двойных разностей на несущей частоте влияние инструментальных ошибок существенно уменьшается и наибольшее влияние на точность измерений оказывают ошибки орбиты и ошибки учета влияния внешней среды. 6.1. Инструментальные ошибки В число этих ошибок входит влияние задержек сигнала в цепях и блоках спутников и приемоиндикаторов, а точнее говоря, изменения этих задержек во времени. Наибольшие же ошибки при измерениях фазы и при использовании одинарных разностей вносит нестабильность стандартов частоты. Используемые в приемоиндикаторах кварцевые генераторы имеют относительную стабильность не более 10-10, что соответствует 100 циклам за час наблюдений на несущей частоте. У атомных стандартов стабильность выше: 10-11 у рубидиевых и 10-12 у цезиевых за интервал времени от нескольких минут до нескольких часов. Однако, даже ошибка 10-12 влечет видимое изменение расстояния примерно в 1 метр за час наблюдений. Поэтому для достижения наивысшей возможной точности, когда определяется орбита спутника и измеряется либо фаза пришедших с него колебаний либо одинарные разности, желательно использовать еще более точные стандарты частоты- водородные мазеры. Они имеют относительную стабильность 10-14 и выше. В массовых наблюдениях и в процессе их обработки используют двойные разности, при этом ошибки стандартов частоты в значительной мере исключаются. Тем не менее не исключается влияние трех типов остаточных ошибок: отличие времени GPS от UTC, остаточная несинхронность часов спутника и приемоиндикатора и относительная несинхронность часов приемоиндикаторов, относительный ход часов приемоиндикаторов. Ошибка в определении эпохи, общая для обоих приемоиндикаторов, приводит к ошибке в интерполированных координатах спутника. Он движется со скоростью примерно 1 км/сек, что соответствует угловой скорости 1,5*10-4 рад/сек. Ошибка определения базы равна произведению ошибки эпохи на угловую скорость спутника. Можно подсчитать, что для определения базы с относительной ошибкой 10-6 часы приемоиндикаторов необходимо синхронизировать с ошибкой около 7 микросекунд. Кварцевые стандарты имеют относительную стабильность не хуже 10-9, что в абсолютной мере на частоте L1 составляет 1,5 Гц/сек. При этом разность эпох за час работы изменяется до 4 микросекунд. Следовательно, данный источник ошибок влияет на общую точность измерений незначительно. В любом случае, относительный ход часов приемоиндикаторов можно оценивать на основе формирования разностей между станциями, поэтому их используют как часть обработки при использовании двойных разностей. |