Лачин Электроника. Электроника рекомендовано Министерством образования Российской Федерации в качестве учебного пособия ля студентов высших технических учебных заведений РостовнаДону Феникс 2001 Рецензенты
 Скачать 7.57 Mb. Скачать 7.57 Mb.
|

|
3.7. УСТРОЙСТВА ДЛЯ ФОРМИРОВАНИЯ И АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ СИГНАЛОВ 3.7.1. Амплитудные ограничители Различают односторонние и двусторонние амплитудные ограничители. Односторонний ограничитель — это устройство, напряжение на выходе которого Uвых(t) остается на постоянном уровне Uотp, когда входное напряжение Uвх(f) либо превышает некоторое пороговое значение Unop(ограничение сверху), либо ниже порогового значения (ограничение снизу). Иначе выходное напряжение повторяет форму входного. Двусторонние ограничители ограничивают сигнал на двух уровнях. На рис. 3.79, а приведены передаточная характеристика и графики входного и выходного напряжений для одностороннего ограничителя сверху, на рис. 3.79, б — для одностороннего ограничителя снизу, а на рис. 3.79, в — для двустороннего ограничителя. Наиболее простыми являются ограничители на диодах (диодные ограничители). Диодные ограничители бывают последовательные и параллельные. В последовательных ограничителях диод включен последовательно с нагрузкой, а в параллельных — параллельно нагрузке. Рассмотрим идеализированную схему последовательного диодного ограничителя (рис. 3.80). До тех пор пока входное напряжение меньше Ео, диод закрыт и Uвыхравно 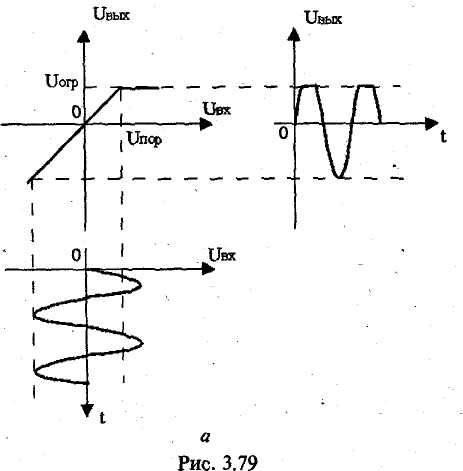 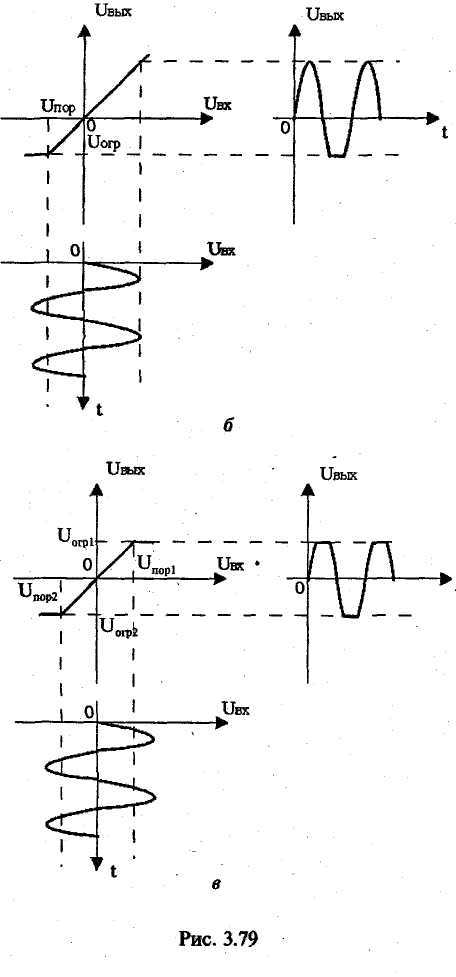 Eо. В промежутках времени, когда входное напряжение превышает Еодиод открыт и Uвыхповторяет Uвх. Таким образом, рассмотренный ограничитель является последовательным диодным ограничителем на положительном уровне снизу. Практически используемая схема рассмотренного ограничителя приведена на рис. 3.81. Она позволяет регулировать уровень ограничения, сделав одно из сопротивлений R1 или R2переменным. Данную схему можно преобразовать в предыдущую, применив теорему об эквивалентном генераторе. Тогда Rни Еобудут иметь следующие значения: Rн= R1/R2, Eo = ER/(R1+ R2). Рассмотрим принцип действия параллельного диодного ограничителя (рис. 3.82). Лишь в промежутках времени, когда входное напряжение более отрицательно, чем Ео, диод открыт (его при анализе можно заменить закорот-кой) и Uвыхравно Е. Во все остальные моменты времени 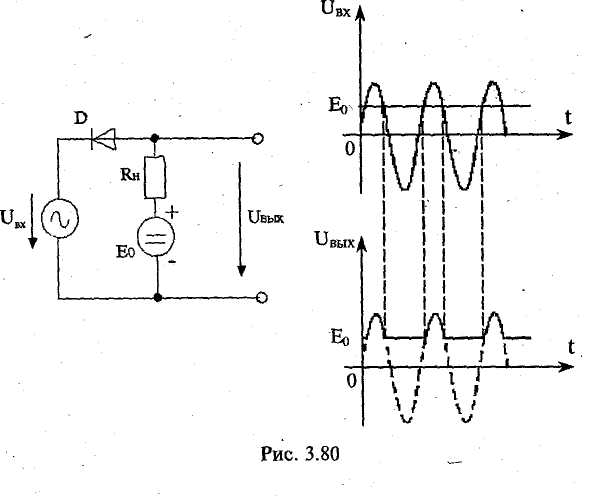 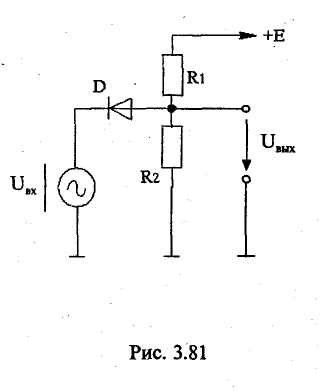 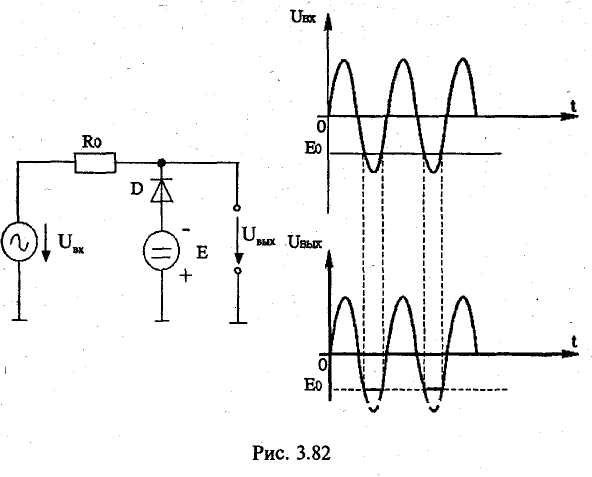 диод закрыт (его при анализе можно заменить разрывом цепи) и Uвыхповторяет Uвх. Таким образом, данный ограничитель является параллельным диодным ограничителем на отрицательном уровне снизу. Рассмотрим работу параллельного ограничителя в случае, когда сопротивление нагрузки соизмеримо с ограничителем (рис. 3.83). Исходная схема (рис. 3.83, а) по теореме об эквивалентном генераторе преобразуется в эквивалентную схему (рис. 3.83, б), в которой ограничивается уже не входное напряжение, а эквивалентное, являющееся результатом 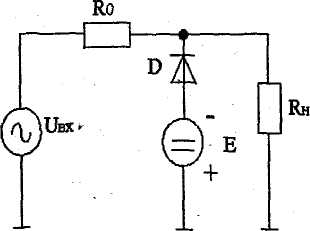 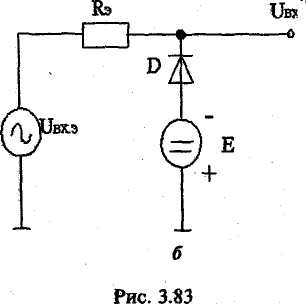  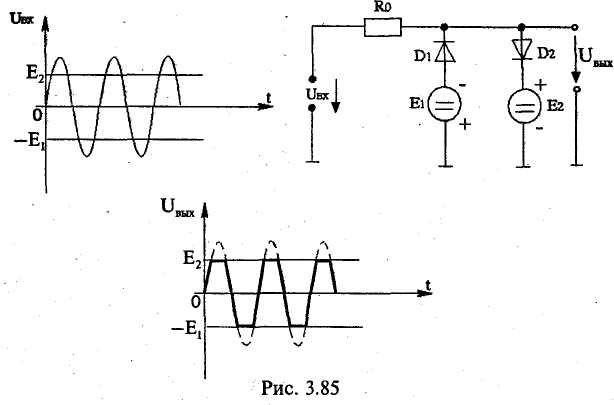 деления входного напряжения между сопротивлениями R0и Rн,Uвх.э.=UmRн/(Rн+R0), Rн=R0IRн. Диаграммы работы этого ограничителя приведены на рис. 3.84. В момент начала ограничения (t1) входное напряжение будет соответствовать некоторому напряжению —E1. Рассмотрим двусторонний диодный ограничитель (рис. 3.85), который является комбинацией двух параллельных односторонних диодных ограничителей. Из анализа схемы видно, что диод Д! открыт лишь в промежутках времени, когда входное напряжение меньше-E1 и Uвых на этом промежутке ограничивается на уровне —E1Диод Д2 открыт лишь в промежутках времени, когда Uвхбольше, чем Е2, и в этих промежутках времени Uвых ограничивается уровнем Е2. Широкое распространение нашли ограничители амплитуды, построенные на основе ОУ. Рассмотрим некоторые из них. На рис. 3.86, а приведена схема одностороннего ограничителя на основе ОУ, на рис. 3.86, б — передаточная характеристика ограничителя, а на рис. 3.86, в — временные диаграммы его работы. Основой данного ограничителя является инвертирующий усилитель на основе ОУ. В промежутках времени, когда напряжение Uвых отрицательное или меньше, чем Uст+Uд, диод закрыт (его при анализе можно заменить разрывом цепи) и устройство работает как обычный инвертирующий усилитель (Uст— напряжение стабилизации стабилитрона, Uд— прямое падение напряжения на диоде). В промежутках времени, когда напряжение Uвхвыше уровня Uст+ Uд, диод открыт, а стабилитрон находится в режиме стабилизации и напряжение Uвых ограничивается на уровне Uст+Uд. Входное напряжение U1, при котором начинается ограничение выходного, определяется выражением U1= -(Uст+Uд)/K, г 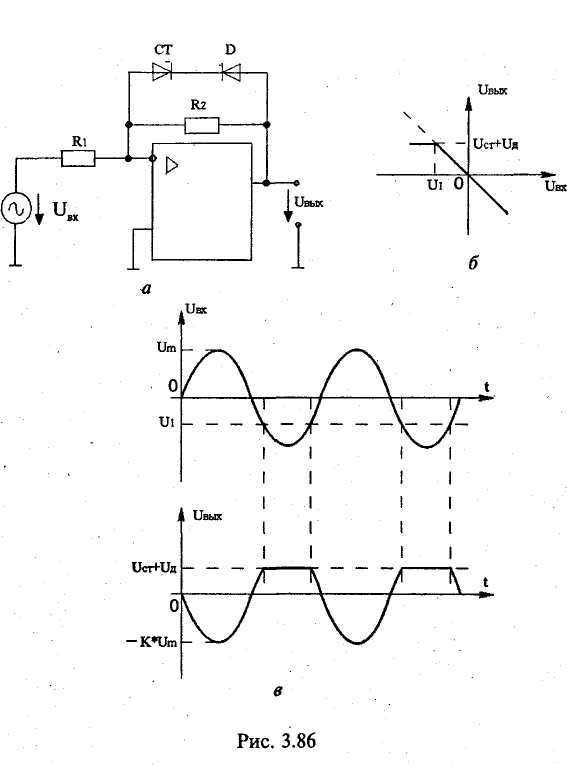 де К = R2/R1 де К = R2/R1Рассмотрим двусторонний ограничитель на основе ОУ (рис. 3.87, а). Если к стабилитрону приложено прямое напряжение, то он выполняет функции диода, и напряжение Uпр на нем достаточно мало (около 0,7 В). Поэтому при положительном выходном напряжении стабилитрон СТ1 выполняет функции диода, и как только выходное напряжение достигает уровня Uст2+Uпр, оно ограничивается на 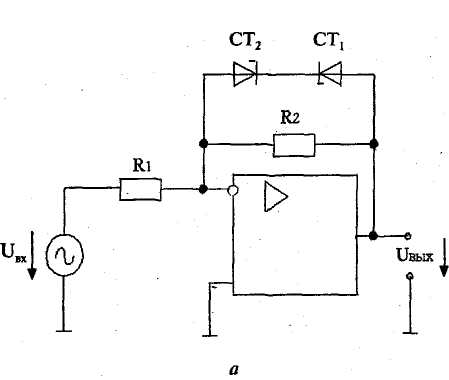 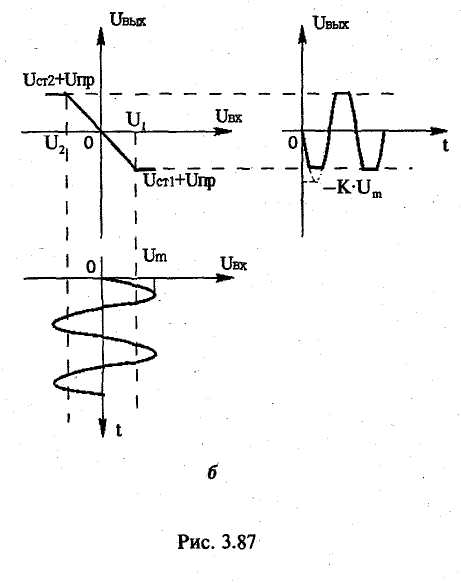 этом уровне (Uст2 - напряжение стабилизации стабилитрона СТ2). При отрицательном выходном напряжении стабилитрон СТ2 используется как диод. Как только напряжение Uвыхдостигает значения -(Uст1+Uпр), оно ограничивается на этом уровне (рис. 3.87, б) (Uст1 — напряжение стабилизации стабилитрона СТ1). Входные напряжения U1и U2, при которых начинаются ограничения, определяются выражениями U1= (Uст1+Uпр)/K,U2 = -(Uст2 + Unp)/K, где К =R2/R1 3.7.2 Цифроаналоговые преобразователи Цифроаналоговые преобразователи (ЦАП) предназначены для преобразования цифровых сигналов в аналоговые. Такое преобразование необходимо, например, при восстановлении аналогового сигнала, предварительно преобразованного в цифровой для передачи на большое расстояние или хранения (таким сигналом, в частности, может быть звук). Другой пример использования такого преобразования — получение управляющего сигнала при цифровом управлении устройствами, режим работы которых определяется непосредственно аналоговым сигналом (что, в частности, имеет место при управлении двигателями). К основным параметрам ЦАП относят разрешающую способность, время установления, погрешность нелинейности и др. Разрешающая способность — величина, обратная максимальному числу шагов квантования выходного аналогового сигнала. Время установления tуст — интервал времени от подачи кода на вход до момента, когда выходной сигнал войдет в заданные пределы, определяемые погрешностью. Погрешность нелинейности — максимальное отклонение графика зависимости выходного напряжения от напряжения, задаваемого цифровым сигналом, по отношению к идеальной прямой во всем диапазоне преобразования. Как и рассматриваемые ниже аналого-цифровые преобразователи (АЦП), ЦАП являются «связующим звеном» между аналоговой и цифровой электроникой. Существуют различные принципы построения АЦП. Рассмотрим наиболее используемые из них. На рис. 3.88 приведена схема ЦАП с суммированием весовых токов. Ключ S5 замкнут только тогда, когда разомкнуты все ключи S1...S4 (при этом ивых=0). Uo— опорное напряжение. Каждый резистор во входной цепи соответствует определенному разряду двоичного числа. По существу этот ЦАП — инвертирующий усилитель на основе операционного усилителя. Анализ такой схемы не представляет затруднений. Так, если замкнут один ключ S1, то uвых=-UoRoc/R, Что соответствует в первом и нулям в остальных разрядах. Из анализа схемы следует, что модуль выходного напряжения пропорционален числу, двоичный код которого определяется состоянием ключей S1...S4. Токи ключей 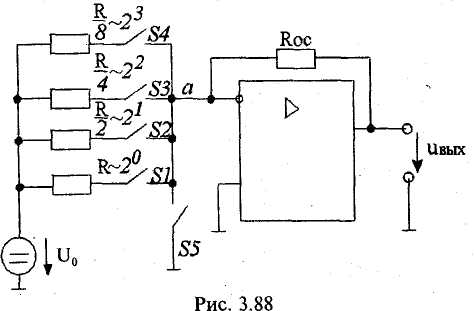 S1...S4 суммируются в точке «а», причем токи различных ключей различны (имеют разный «вес»). Это и определяет название схемы. Из вышеизложенного следует, что 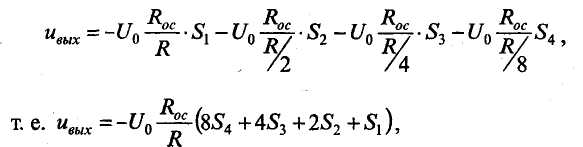 где Si ,i = 1,2, 3, 4 принимает значение 1, если соответствующий ключ замкнут, и 0, если ключ разомкнут. Состояние ключей определяется входным преобразуемым кодом. Схема проста, но имеет недостатки: значительные изменения напряжения на ключах и использование резисторов с сильно отличающимися сопротивлениями. Требуемую точность этих сопротивлений обеспечить затруднительно. Рассмотрим ЦАП на основе резистивной матрицы R— 2R (матрицы постоянного сопротивления) (рис. 3.89). В 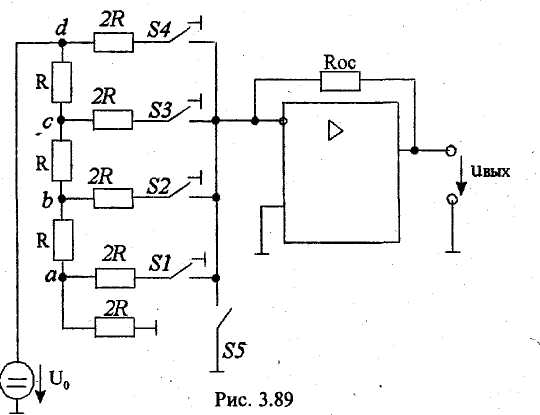 схеме использованы так называемые перекидные ключи S1...S4, каждый из которых в одном из состояний подключен к общей точке, поэтому напряжения на ключах невелики. Ключ S5 замкнут только тогда, когда все ключи S1...S4 подключены к общей точке. Во входной цепи использованы резисторы всего с двумя различными значениями сопротивлений. Из анализа схемы можно увидеть, что и для нее модуль выходного напряжения пропорционален числу, двоичный код которого определяется состоянием ключей S1...S4. Анализ легко выполнить, учитывая следующее. Пусть каждый из ключей S1...S4 подключен к общей точке. Тогда, каклегко заметить, напряжение относительно общей точки в каждой следующей из точек «a»...«d» в 2 раза больше, чем в предыдущей. К примеру, напряжение в точке «b» в 2 раза больше, чем в точке «а» (напряжения Uа, Ub, Ucи Udв указанных точках определяются следующим образом: Ud = Uo; Uc= Uo/2; Ub = U0/4; Ud = Uo/8). Допустим, что состояние указанных ключей изменилось. Тогда напряжения в точках «a»...»d» не изменятся, так как напряжение между входами операционного усилителя практически нулевое. Из вышеизложенного следует, что: 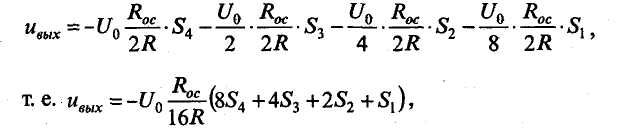 где Si ,i= 1, 2, 3, 4 принимает значение 1, если соответствующий ключ замкнут, и 0, если ключ разомкнут. Рассмотрим ЦАП для преобразования двоично-десятичных чисел (рис. 3.90). Д 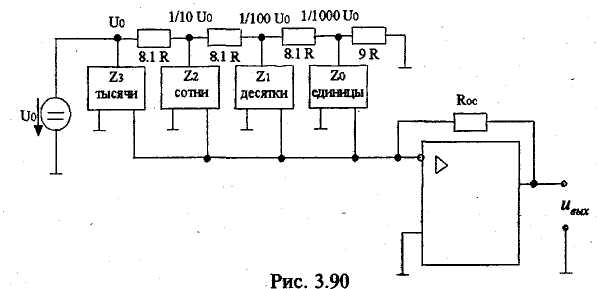 ля представления каждого разряда десятичного числа используется отдельная матрица R— 2R(обозначены прямоугольниками). Z0...Z3обозначают числа, определенные ля представления каждого разряда десятичного числа используется отдельная матрица R— 2R(обозначены прямоугольниками). Z0...Z3обозначают числа, определенныесостоянием ключей каждой матрицы R—2R. Принцип действия становится понятным, если учесть, что сопротивление каждой матрицы R, и если выполнить анализ фрагмента схемы, представленного на рис. 3.91. 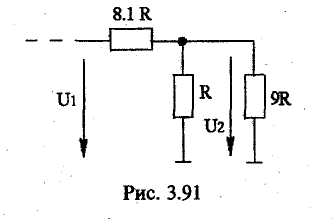 Из анализа следует, что 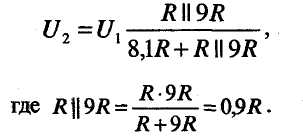 Следовательно U2 = 0,1 U1. С учетом этого получим Наиболее распространенными являются ЦАП серий микросхем 572, 594, 1108, 1118 и др. В табл. 3.2 приведены параметры некоторых ЦАП. 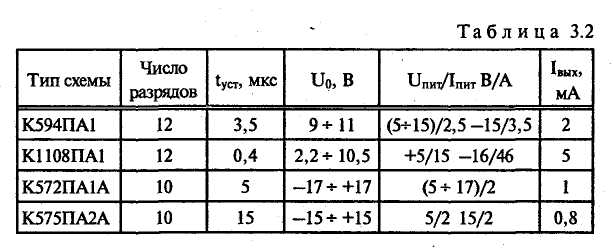 3.7.3 Аналого-цифровые преобразователи Аналого-цифровые преобразователи (АЦП) — это устройства, предназначенные для преобразования аналоговых сигналов в цифровые. Для такого преобразования необходимо осуществить квантование аналогового сигнала, т. е. мгновенные значения аналогового сигнала ограничить определенными уровнями, называемыми уровнями квантования. Характеристика идеального квантования имеет вид, приведенный на рис. 3.92. Квантование представляет собой округление аналоговой величины до ближайшего уровня квантования, т. е. максимальная погрешность квантования равна ±0,5h (h — шаг квантования). 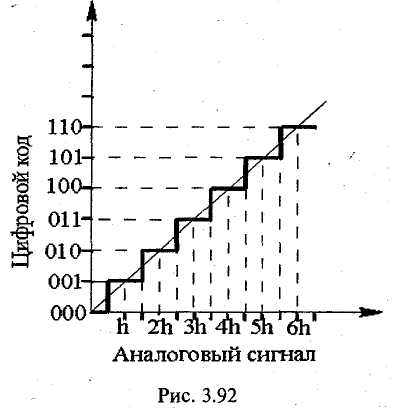 К основным характеристикам АЦП относят число разрядов, время преобразования, нелинейность и др. Число разрядов — количество разрядов кода, связанного с аналоговой величиной, которое может вырабатывать АЦП. Часто говорят о разрешающей способности АЦП, которую определяют величиной, обратной максимальному числу кодовых комбинаций на выходе АЦП. Так, 10-разрядный АЦП имеет разрешающую способность (210 = 1024)-1, т. е. при шкале АЦП, соответствующей 10В, абсолютное значение шага квантования не превышает ЮмВ. Время преобразования tпp— интервал времени от момента заданного изменения сигнала на входе АЦП до появления на его выходе соответствующего устойчивого кода. Характерными методами преобразования являются следующие: параллельного преобразования аналоговой величины и последовательного преобразования. Рассмотрим АЦП с параллельным преобразованием входного аналогового сигнала. По параллельному методу входное напряжение одновременно сравниваются с nопорными напряжениями и определяют, между какими двумя опорными напряжениями оно лежит. При этом результат получают быстро, но схема оказывается достаточно сложной. Рассмотрим принцип действия такого АЦП (рис. 3.93). При Uвх= 0, поскольку для всех ОУ разность напряжений (U+ — U_) < 0 (U+, U_ — напряжения относительно общей точки соответственно неинвертирующего и инвертирующего входа), напряжения на выходе всех ОУ равны — Епит а на выходах кодирующего преобразователя (КП) Zo, Z1, Z2 устанавливаются нули. Если Uвх>0,5U, но меньше 3/2 U, лишь для нижнего ОУ U+ — U_ > 0 и лишь на его выходе появляется напряжение +Епит, что приводит к появлению на выходах КП следующих сигналов: Zo = 1, Z2 = Zl= 0. Если Uвх > 3/2 U, но меньше 5/2 U, то на выходе двух нижних ОУ появляется напряжение +Епит, что приводит к появлению на выходах КП кода 010 и т. д. Рассмотрим конкретный вариант АЦП с последовательным преобразованием входного сигнала (последовательного счета), который называют АЦП со следящей связью (рис. 3.94). В АЦП рассматриваемого типа используется ЦАП и реверсивный счетчик, сигнал с которого обеспечивает изменение напряжения на выходе ЦАП. Настройка схемы такова, что обеспечивается примерное равенство напряжений на входе Uвхи на выходе ЦАП — U. Если входное напряжение Uвхбольше напряжения Uнавыходе ЦАП, то счетчик переводится в режим прямого счета и код на его выходе увеличивается, обеспечивая увеличение напряжения на выходе ЦАП. В момент равенства Uвхи Uсчет прекращается и с выхода реверсивного счетчика снимается код, соответствующий входному напряжению. Метод последовательного преобразования реализуется и в АЦП время — импульсного преобразования (АЦП с генератором линейно изменяющегося напряжения (ГЛИН)). Принцип действия рассматриваемого АЦП 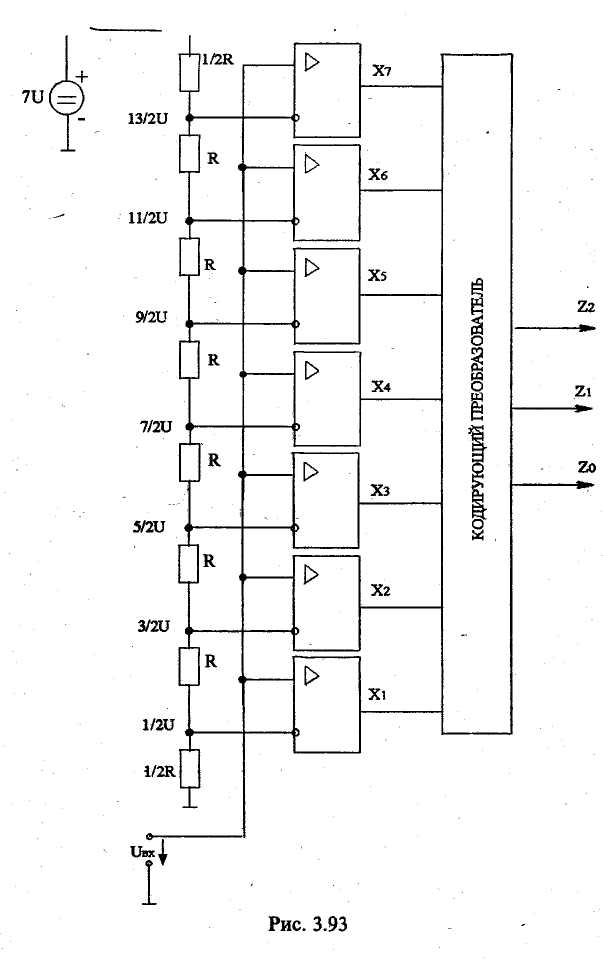 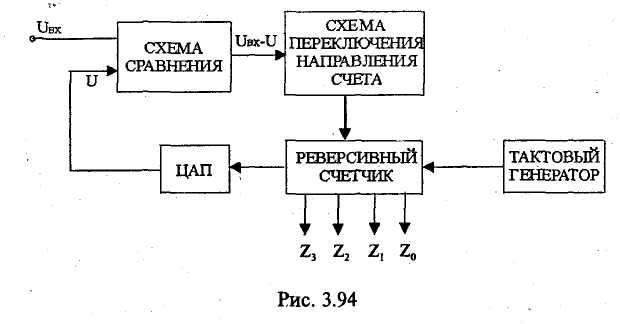 рис. 3.95) основан на подсчете числа импульсов в отрезке времени, в течение которого линейно изменяющееся напряжение (ЛИН), увеличиваясь от нулевого значения, достигает уровня входного напряжения Uвх. Использованы следующие обозначения: СС — схема сравнения, ГИ — генератор импульсов, Кл — электронный ключ, Сч — счетчик импульсов. Отмеченный во временной диаграмме 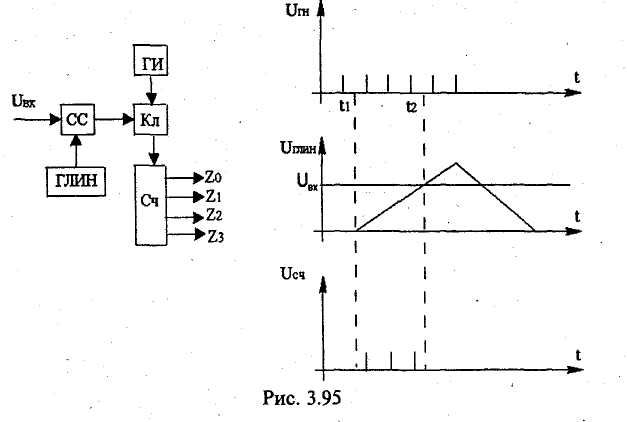 момент времени t1 соответствует началу измерения входного напряжения, а момент времени t2 соответствует равенству входного напряжения и напряжения ГЛИН. Погрешность измерения определяется шагом квантования времени. Ключ Кл подключает к счетчику генератор импульсов от момента начала измерения до момента равенства Uвхи Uглин. Через UСчобозначено напряжение на входе счетчика. Код на выходе счетчика пропорционален входному напряжению. Одним из недостатков этой схемы является невысокое быстродействие. Рассмотрим АЦП с двойным интегрированием, который также реализует метод последовательного преобразования входного сигнала (рис. 3.96). Использованы следующие обозначения: СУ — система управления, ГИ — генератор импульсов, Сч — счетчик импульсов. Принцип действия АЦП состоит в определении отношения двух отрезков времени, в течение одного из которых выполняется интегрирование входного напряжения Uвхинтегратором на основе ОУ (напряжение UИна выходе интегратора изменяется от нуля до максимальной по модулю величины), а в течение следующего — интегрирование опорного 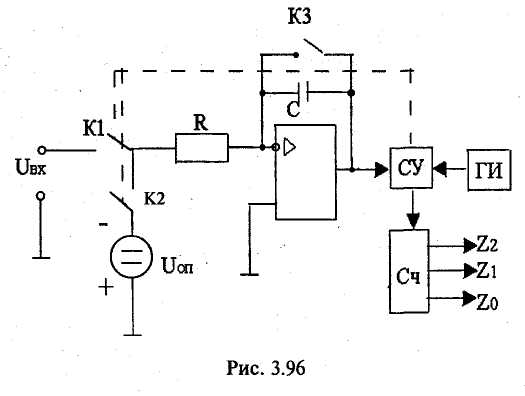 напряжения Uon (UИменяется от максимальной по модулю величины до нуля) (рис. 3.97). Пусть время t1интегрирования входного сигнала постоянно, тогда чем больше второй отрезок времени t2 (отрезок времени, в течение которого интегрируется опорное напряжение), тем больше входное напряжение. Ключ КЗ предназначен для установки интегратора в исходное нулевое состояние. В первый из указанных отрезков времени ключ К1 замкнут, ключ К2 разомкнут, а во второй, отрезок времени их состояние является обратным по отношению к указанному. Одновременно с замыканием ключа К2 импульсы с генератора импульсов ГИ начинают поступать через схему управления СУ на счетчик Сч. Поступление этих импульсов заканчивается тогда, когда напряжение на выходе интегратора оказывается равным нулю. Н  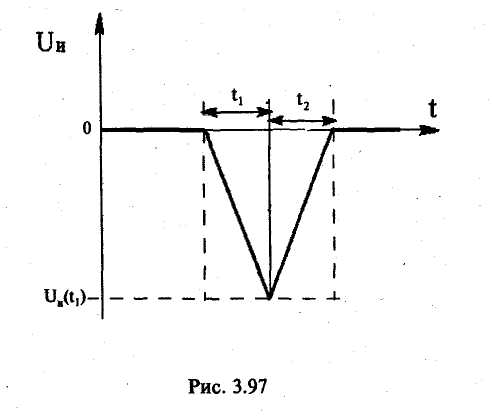 апряжение на выходе интегратора по истечении отрезка времени t1 определяется выражением апряжение на выходе интегратора по истечении отрезка времени t1 определяется выражениемИспользуя аналогичное выражение для отрезка времениt2, получим Подставив сюда выражение для Uи(t1), получим откуда Uвх= Uoat2/t1. Код на выходе счетчика определяет величину входного напряжения. Одним из основных преимуществ АЦП рассматриваемого типа является высокая помехозащищенность. Случайные выбросы входного напряжения, имеющие место в течение короткого времени, практически не оказывают влияния на погрешность преобразования. Недостаток АЦП — малое быстродействие. Наиболее распространенными являются АЦП серий микросхем 572, 1107, 1138 и др. (табл. 3.3) Из таблицы видно, что наилучшим быстродействием обладает АЦП параллельного преобразования, а наихудшим — АЦП последовательного преобразования. Таблица 3.3 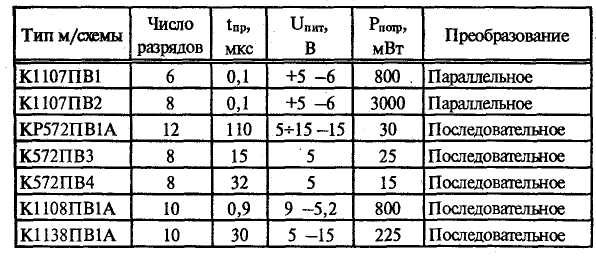 3.8. ГЕНЕРАТОРЫ ИМПУЛЬСНЫХ СИГНАЛОВ Наиболее распространены генераторы прямоугольных и линейно изменяющихся (пилообразных) импульсов напряжения. Генераторы импульсных сигналов (импульсные генераторы) могут работать в одном из трех режимов: автоколебательном, ждущем или синхронизации. В автоколебательном режиме генераторы непрерывно, формируют импульсные сигналы без внешнего воздействия. В ждущем режиме генераторы формируют импульсный сигнал лишь по приходе внешнего (запускающего) сигнала. В режиме синхронизации генераторы вырабатывают импульсы напряжения, частота которых равна или кратна частоте синхронизирующего сигнала. Рассмотрим некоторые из генераторов импульсных сигналов. 3.8.1. Генераторы прямоугольных импульсов Генераторы прямоугольных импульсов делятся на мультивибраторы и блокинг-генераторы. И те и другие могут работать как в автоколебательном, так и в ждущем режимах. Рассмотрим вначале автоколебательные мультивибраторы. 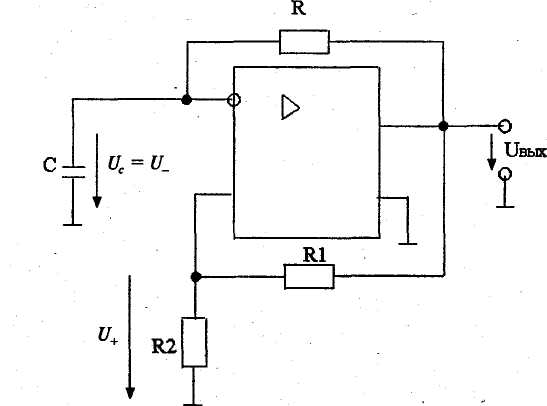 Такие генераторы могут быть построены на дискретных, логических элементах или на операционных усилителях. Автоколебательный мультивибратор на основе ОУ представлен на рис. 3.98. В данной схеме с помощью резисторов R1и R2введена положительная обратная связь, что является необходимым условием для возникновения Такие генераторы могут быть построены на дискретных, логических элементах или на операционных усилителях. Автоколебательный мультивибратор на основе ОУ представлен на рис. 3.98. В данной схеме с помощью резисторов R1и R2введена положительная обратная связь, что является необходимым условием для возникновения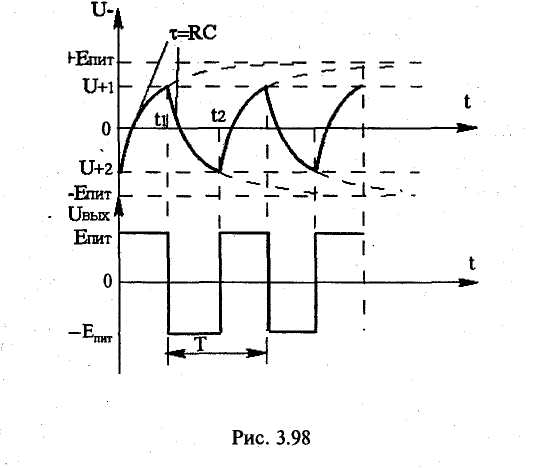 в схеме электрических колебаний. В зависимости от напряжения на выходе (которое может быть равно либо +Епит, либо — Епит, где Епит — напряжения питания ОУ) на неинвертирующем входе ОУ устанавливается или напряжение U+l, или напряжение U+2, причем Емкость С, входящая в цепь отрицательной обратной связи, перезаряжается с постоянной времени т= RC. Напряжение Ucна емкости, равное напряжению U_ на инвертирующем входе, стремится либо к уровню +Епит (при Uвых=+Епит), либо к уровню -Епит (при Uвых=-Епит). До момента времени t1U+— U_= U+1 — Uс > 0, следовательно, ОУ находится в режиме насыщения и на его выходе удерживается напряжение +Епит. Начиная с момента времени t1 эта разность меняет знак, что приводит к изменению напряжения на выходе ОУ на — Епит. После момента времени t1 емкость С перезаряжается, причем ее напряжение стремится к уровню — Епит. Очевидно, что до момента времени t2U+-U_=U+2—Uc< 0, что и удерживает выходное напряжение ОУ на уровне —Епит. Начиная с момента времени t2, эта разность вновь меняет знак, происходит изменение напряжения Uвыхи т.д. Таким образом, данный мультивибратор формирует прямоугольные импульсы напряжения. Период следования импульсов Т определяется выражением 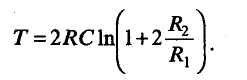 В случае использования вместо резистора Rдвух разных резисторов и диодов можно построить несимметричный мультивибратор (рис. 3.99, а), у которого длительности положительного и отрицательного импульсов не совпадают. Принцип работы мультивибратора поясняют временные диаграммы (рис. 3.99, б). 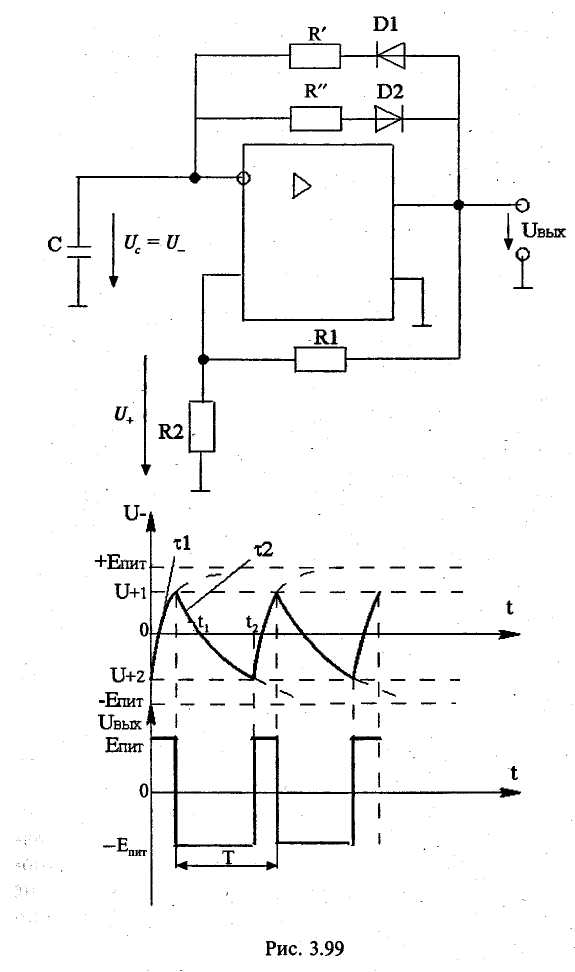 Из приведенных построений очевидно, что разная длительность положительного и отрицательного импульсов обеспечивается разными постоянными времени перезаряда емкостей τ1 и τ2: где R" > R'. Рассмотрим ждущий мультивибратор на основе ОУ (рис. 3.100), который иногда называют одновибратором. Нетрудно заметить, что эта схема аналогична схеме автоколебательного мультивибратора, но в нее введены диод D2 (для осуществления ждущего режима) и цепь запуска на элементах С1,R3, D1 (рис. 3.100, а). Схема имеет одно устойчивое состояние, когда напряжение на выходе отрицательное (примерно равно — Епит). Если бы по какой-либо причине напряжение на выходе оказалось положительным (+Епит), то в результате рассматриваемых дальше процессов состояние схемы изменилось бы. В исходном состоянии (на выходе — Епит) диод D2 открыт, напряжение на инвертирующем входе U_ примерно равно нулю, а напряжение U+на неинвертирующем входе определяется выражением U+— U_ < 0 и Uвых= —Епит. Диод D1, подключеный к неинвертирующему входу, закрыт. В момент времени t1входной сигнал открывает этот диод, на неинвертирующий вход подается положительный сигнал (на инвертирующем входе остается нулевой сигнал), и ОУ переходит в режим с положительным напряжением на выходе. После этого начинается заряд конденсатора С. Когда напряжение на нем становится больше напряжения U+1, определяемого выражением   дифференциальный сигнал U+— U_ становится отрицательным и ОУ возвращается дифференциальный сигнал U+— U_ становится отрицательным и ОУ возвращаетсяв исходное устойчивое состояние (в таком состоянии дифференциальный сигнал отрицательный). Из временных диаграмм (рис. 3.100, б) следует, что лишь после момента времени t3можно подавать очередной запускающий импульс. Существуют схемы ждущих мультивибраторов на дискретных и логических элементах. Для получения мощных прямоугольных импульсов малой длительности (от долей микросекунды до долей миллисекунды) и скважностью до нескольких десятков тысяч используют блокинг-генераторы. Основным элементом таких генераторов является импульсный трансформатор. Блокинг-генератор может работать в автоколебательном, ждущем режимах или режиме синхронизации.   Рассмотрим схему автоколебательного блокинг-генера-тора (рис. 3.101, а). Во время паузы (выходное напряжение отсутствует) происходит перезаряд конденсатора по цепи Е—R—W2 с постоянной времени τ1= RС. В момент времени, когда напряжение на конденсаторе С (и, следовательно, на базе транзистора) становится равным нулю, транзистор начинает открываться (выходить из режима отсечки), начинает протекать ток коллектора, что вызывает появление сигнала положительной обратной связи (через обмотку трансформатора W2), под действием которой транзистор скачкообразно переходит в режим насыщения. При этом конденсатор С перезаряжается по цепи W2—С — входное сопротивление транзистора rвх с постоянной времени τ2 = rвх• С. При увеличении напряжения на конденсаторе С ток базы начинает уменьшаться и в конце концов транзистор выходит из насыщения и начинает закрываться. Возникает сигнал положительной обратной связи, который скачкообразно переводит транзистор в запертое состояние. После этого энергия, запасенная в индуктивности намагничивания, рассеивается на сопротивлении нагрузки. Так как rвх«R, то время нахождения транзистора в открытом состоянии tо, а следовательно, и Рассмотрим схему автоколебательного блокинг-генера-тора (рис. 3.101, а). Во время паузы (выходное напряжение отсутствует) происходит перезаряд конденсатора по цепи Е—R—W2 с постоянной времени τ1= RС. В момент времени, когда напряжение на конденсаторе С (и, следовательно, на базе транзистора) становится равным нулю, транзистор начинает открываться (выходить из режима отсечки), начинает протекать ток коллектора, что вызывает появление сигнала положительной обратной связи (через обмотку трансформатора W2), под действием которой транзистор скачкообразно переходит в режим насыщения. При этом конденсатор С перезаряжается по цепи W2—С — входное сопротивление транзистора rвх с постоянной времени τ2 = rвх• С. При увеличении напряжения на конденсаторе С ток базы начинает уменьшаться и в конце концов транзистор выходит из насыщения и начинает закрываться. Возникает сигнал положительной обратной связи, который скачкообразно переводит транзистор в запертое состояние. После этого энергия, запасенная в индуктивности намагничивания, рассеивается на сопротивлении нагрузки. Так как rвх«R, то время нахождения транзистора в открытом состоянии tо, а следовательно, идлительность импульса на нагрузке значительно меньше периода следования импульсов. Временные диаграммы работы автоколебательного блокинг-генератора приведены на рис. 3.101,6. 3.8.2. Генераторы линейно изменяющегося напряжения Линейно изменяющимся напряжением (ЛИН) называют напряжение, которое в течение промежутка времени, называемого рабочим ходом, изменяется по линейному закону, а затем в течение промежутка времени, называемого обратным ходом, возвращается к исходному уровню (рис. 3.102).  На рис. 3.102 приняты следующие обозначения: Uo— начальный уровень, Um— амплитуда ЛИН, Тр — время рабочего хода, То — время обратного хода. Л  инейность ЛИН оценивается коэффициентом нелинейности, который определяется по формуле инейность ЛИН оценивается коэффициентом нелинейности, который определяется по формулегде U'(0) — первая производная напряжения по времени (скорость изменения ЛИН) в начале рабочего хода; U'(Тр) — первая производная напряжения по времени в конце рабочего хода. Устройства, предназначенные для формирования ЛИН, называют генераторами ЛИН (ГЛИН). Генераторы ЛИН часто называют генераторами пилообразного напряжения.  Принцип построения генераторов ЛИН основан на заряде емкости постоянным или почти постоянным током. Основой ГЛИН (рис. 3.103) является емкость, через которую от источника постоянного тока ИТ протекает постоянный ток, благодаря чему при разомкнутом ключевом устройстве КУ напряжение на емкости определяется выражением Принцип построения генераторов ЛИН основан на заряде емкости постоянным или почти постоянным током. Основой ГЛИН (рис. 3.103) является емкость, через которую от источника постоянного тока ИТ протекает постоянный ток, благодаря чему при разомкнутом ключевом устройстве КУ напряжение на емкости определяется выражением(при ic=I= const), т. е. изменяется по линейному закону. При замыкании КУ емкость разряжается через сопротивление КУ и т. д. ГЛИН могут работать либо в ждущем (рис. 3.103, а), либо в автоколебательном режиме (рис. 3.103, б). ГЛИН в автоколебательном режиме формирует ЛИН регулярно, а для получения ЛИН в ГЛИН в ждущем режиме необходим внешний импульс напряжения Uвх. Все ГЛИН можно разделить на три типа: а) с интегрирующей RС-цепочкой; б) с токостабилизирующим двухполюсником; в) с компенсирующей обратной связью (ОС). В простейшем случае (рис. 3.104) основой ГЛИН является интегрирующая RC-цепочка. В этой схеме При τ= RС »t1 Ucl « Uи, следовательно, на отрезке времени [0, t1]   т. е. на начальном участке экспоненты скорость изменения напряжения Uс примерно постоянна и при малых значениях tформируется ЛИН. Достоинством данных генераторов является простота их реализации. Существенным же недостатком является то, что для получения малого коэффициента нелинейности необходимо, чтобы напряжение генератора Uбыло гораздо (на порядок и более) больше амплитуды ЛИН. Такой генератор может быть реализован на основе транзисторного ключа (рис. 3.105). До момента времени t1транзисторный ключ находится в режиме насыщения, т. е. напряжение Uкэ, а значит, и напряжение Uвыхравны нулю. При подаче в момент времени t1 запирающего импульса напряжения транзистор входит в режим отсечки, и емкость С заряжается от источника Ек через сопротивление Rк, причем напряжение на емкости стремится к уровню Ек. В момент времени t2 транзистор вновь входит в режим насыщения, и емкость через малое сопротивление промежутка коллектор-эмиттер транзистора разряжается. Если промежуток времени t2 — t1гораздо меньше RC, то, как было показано выше, напряжение на емкости изменяется по линейному закону. Для предотвращения пробоя транзистора (например, при увеличении длительности входного импульса) к его коллектору подключен диодный ограничитель (D, Еф). Если по какой-либо причине напряжение на емкости увеличивается, то, как только оно достигнет уровня Еф, диод D открывается и напряжение Uвых удерживается на уровне Еф.   Рассмотрим принцип построения ГЛИН с токостаби-лизирующим двухполосником, обеспечивающим протекание через него постоянного тока независимо от приложенного напряжения. Схема, поясняющая принцип построения такого ГЛИН, приведена на рис. 3.106. Рассмотрим принцип построения ГЛИН с токостаби-лизирующим двухполосником, обеспечивающим протекание через него постоянного тока независимо от приложенного напряжения. Схема, поясняющая принцип построения такого ГЛИН, приведена на рис. 3.106. В этой схеме через двухполюсник Rи емкость С протекает ток iR, определяемый выражением iR =(U-Uc)/R. По мере роста напряжения на емкости Ucчислитель этого выражения уменьшается, но во столько же раз уменьшается и сопротивление двухполюсника R, так что частное от деления остается неизменным. Простейшим токостабилизирующим элементом является транзистор. При постоянном токе базы (например, iбз), даже при значительном уменьшении напряжения иэк между эмиттером и коллектором (например, от U2до U1) коллекторный ток транзистора уменьшается незначительно. Эти изменения определяются выходной характеристикой транзистора, причем рабочая точка транзистора перемещается из точки А в С (рис. 3.107, а). Изменение тока коллектора обозначено через Δi1. Б  олее точный токостабилизирующий двухполюсник на основе транзистора приведен на рис. 3.107, б. Предположим, что напряжение иэк уменьшается от U2до U1, при этом коллекторный ток тоже стремится уменьшиться. Это должно привести к уменьшению тока iэ, а значит, и к уменьшению падения напряжения iэ • Rна сопротивлении R. Согласно выражению иэб = Е — iэ • Rнапряжение иэб олее точный токостабилизирующий двухполюсник на основе транзистора приведен на рис. 3.107, б. Предположим, что напряжение иэк уменьшается от U2до U1, при этом коллекторный ток тоже стремится уменьшиться. Это должно привести к уменьшению тока iэ, а значит, и к уменьшению падения напряжения iэ • Rна сопротивлении R. Согласно выражению иэб = Е — iэ • Rнапряжение иэбпри этом возрастет, что приведет к увеличению тока базы i6. В конечном итоге ток коллектора iк уменьшится менее значительно в сравнении со случаем, когда ток базы не изменяется. На рис. 3.107, а изменение тока коллектора, соответствующее схеме рис. 3.107, б; обозначено через Аi2. Генератор ЛИН с токостабилизирующим двухполюсником приведен на рис. 3.108. По принципу действия данный генератор аналогичен ранее рассмотренному ГЛИН с интегрирующей RС-цепочкой, но теперь вместо сопротивления RKиспользуется токостабилизирующий двухполюсник. 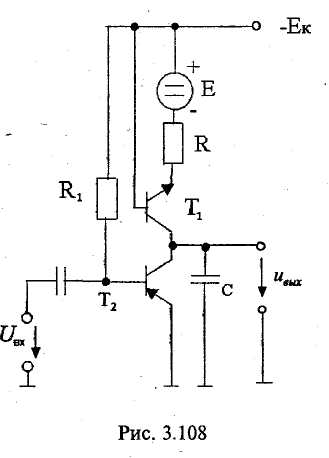 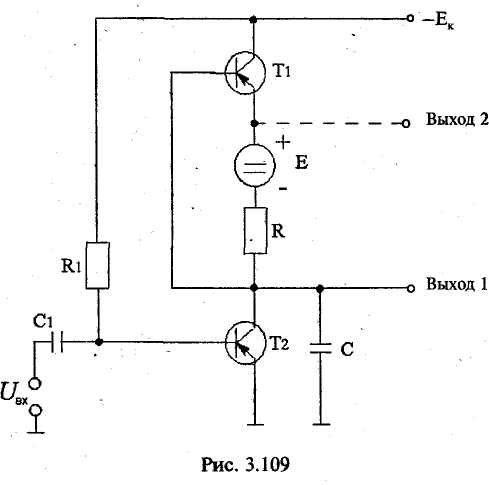 Недостатком данной схемы является то, что при подключении к выходу (т. е. к емкости С) сопротивления нагрузки искажается линейность выходного напряжения. Избежать этого можно, реализовав ГЛИН так, как показано на рис. 3.109. По отношению к выходу 2 на транзисторе Т1 построен эмиттерный повторитель, благодаря чему к этому выходу можно подключить низкоомную нагрузку, не искажая форму выходного ЛИН. Недостатком данной схемы является то, что при подключении к выходу (т. е. к емкости С) сопротивления нагрузки искажается линейность выходного напряжения. Избежать этого можно, реализовав ГЛИН так, как показано на рис. 3.109. По отношению к выходу 2 на транзисторе Т1 построен эмиттерный повторитель, благодаря чему к этому выходу можно подключить низкоомную нагрузку, не искажая форму выходного ЛИН.Рассмотрим ГЛИН с компенсирующей ОС. Поясним принцип действия такого ГЛИН (рис. 3.110). Компенсирующее напряжение UKповторяет напряжение на емкости Ucпри размыкании ключа и заряде емкости от источника U. Поскольку компенсирующее напряжение включено встречно по отношению к напряжению на емкости, то напряжение, приложенное к сопротивлению R, все время постоянно и равно U. Следовательно, ток, проходящий через сопротивление, а значит, и через емкость, также постоянен, что и обеспечивает линейность выходного напряжения. Укрупненная структурная схема такого ГЛИН приведена на рис. 3.111. Для этой схемы справедливы следующие соотношения: 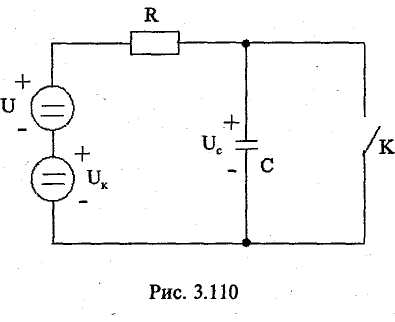 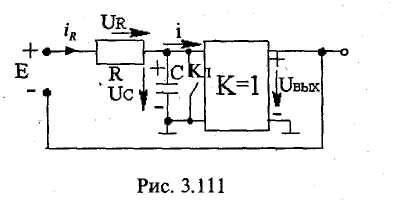 Решая их относительно iR, получим С учетом того, что ток i в таких схемах пренебрежимо мал, можно записать iс = iR= const. Так как ток, проходящий через емкость, постоянен, то напряжение на ней, а значит, и на выходе изменяется по линейному закону. По окончании формирования прямого хода ЛИН ключ Кл замыкается и напряжение Uвыхустанавливается на нулевом уровне. Принципиальная схема генератора ЛИН приведена на рис. 3.112.  На транзисторе Т1 реализован насыщенный транзисторный ключ, а на транзисторе Т2 — эмиттерный повторитель. В исходном состоянии емкость G разряжена: Uc= 0, U=0; диод открыт, а значит Uc0 = Ек. При подаче входного запирающего напряжения (положительного) транзистор Т1 запирается, емкость С начинает заряжаться, а напряжения Ucи Uначинают возрастать. Следовательно, потенциал точки «а» становится меньше —Ек, диод закрывается и заряд емкости С происходит за счет разряда емкости С0. Так как UR= Uc0 + U — UcиU= Uc, то UR = Uc0 .Напряжение Uc0 изеняется незначительно, поэтому ток, протекающий по сопротивлению Rки емкости С, практически не изменяется, что и обеспечивает линейность выходного напряжения. Для обеспечения постоянства тока необходимо, чтобы за время формирования прямого хода напряжение на емкости С0 сохранялось примерно постоянным, поэтому величину емкости С0 выбирают как можно большей. В момент окончания входного запирающего напряжения транзистор Т1 входит в режим насыщения, и емкость С разряжается. ГЛИН можно реализовать, используя ОУ (рис. 3.113, а). Анализ такой схемы прост и не требует особых пояснений (в момент времени t1ключ К размыкается и осуществляется прямой ход, а в момент времени t2 ключ замыкается, емкость С разряжается и на выходе устанавливается нулевое напряжение). Из приведенных ниже выражений следует, что емкость С заряжается почти постоянным током, а значит, напряжение на ней (как и напряжение Uвых) изменяется по линейному закону (рис.3.113,6). Протекающий через резистор Rток определяется выражением iR= (E—Uвх)/R. Если ОУ близок к идеальному, (К→∞, Uвх→0, i_→0), то iR= E/R = const, и Uвых= -Uc+ Uвх=    -UC -UC Из выражения iR = iС+i_ с учетом, что i_ = 0, получим iR = iС. Следовательно,    СОВРЕМЕННЫЕ ПОДХОДЫ К АНАЛИЗУ И СИНТЕЗУ ЭЛЕКТРОННЫХ УСТРОЙСТВ СОВРЕМЕННЫЕ ПОДХОДЫ К АНАЛИЗУ И СИНТЕЗУ ЭЛЕКТРОННЫХ УСТРОЙСТВДля создания электронного устройства, обладающего высокими технико-экономическими показателями, приходится рассматривать различные варианты его схемотехнической реализации и выполнять множество самых разнообразных расчетов. Например, может потребоваться определение токов и напряжений схемы, расчет амплитудно-частотной характеристики, вычисление входного сопротивления. В настоящее время наиболее эффективным способом получения самой разнообразной информации, характеризующей разрабатываемое электронное устройство, является математическое моделирование. |