Конспект лекций основы гидро и пневмо приводов. Осн.гидропр. Консп.. Конспект. Часть Гидропривод Введение Гидравлика наука о жидкостях, законах их равновесия и движения
 Скачать 0.75 Mb. Скачать 0.75 Mb.
|

|
Безопасность для обслуживающего персонала при соблюдении общих правил, исключающих механический травматизм. В гидро- и электроприводах возможно поражение электрическим током или жидкостью при нарушении изоляции или разгерметизации трубопроводов. 9. Улучшение проветривания рабочего пространства за счет отработанного воздуха. Это свойство особенно полезно в горных выработках и помещениях химических и металлообрабатывающих производств. 10. Нечувствительность к радиационному и электромагнитному излучению. В таких условиях электрогидравлические системы практически непригодны. Это достоинство широко используется в системах управления космической, военной техникой, в атомных реакторах и т.п. Несмотря на вышеописанные достоинства, применяемость пневмопривода ограничивается по следующим причинам. 1. Высокая стоимость пневмоэнергии. Если гидро- и электропривод имеют КПД, соответственно, около 70 % и 90 %, то КПД пневмопривода обычно 5-15 % и очень редко до 30 %. Во многих случаях КПД может быть 1 % и менее. По этой причине пневмопривод не применяется в машинах с длительным режимом работы и большой мощности, кроме условий, исключающих применение электроэнергии (например, горнодобывающие машины в шахтах, опасных по газу). 2. Относительно большая масса и габариты пневмомашин из-за низкого рабочего давления. Если удельная масса гидромашин, приходящаяся на единицу мощности, в 5-10 раз меньше веса электромашин, то пневмомашины имеют примерно такую же массу и габариты, как последние. 3. Трудность обеспечения стабильной скорости движения выходного звена при переменной внешней нагрузке. Вместе с тем мягкие механические характеристики пневмопривода в некоторых случаях являются и его достоинством. 4. Высокий уровень шума, достигающий 95-130 дБ при отсутствии средств для его снижения. Наиболее шумными являются поршневые компрессоры и пневмодвигатели, особенно пневмомолоты и другие механизмы ударно-циклического действия. 5. Малая скорость передачи управляющего сигнала, что приводит к запаздыванию выполнения операций. Скорость прохождения сигнала равна скорости звука и, в зависимости от давления воздуха, составляет примерно от 150 до 360 м/с. В гидроприводе и электроприводе, соответственно, около 1000 и 300 000 м/с. Перечисленные недостатки могут быть устранены применением комбинированных пневмоэлектрических или пневмогидравлических приводов. 2.3 Комбинированные приводы Малая жесткость пневмопривода накладывает ограничения на применение пневматики для перемещения рабочих органов. Имеется даже термин—податливость,--характеризующий зависимость скорости пневмодвигателя от нагрузки. Если использовать в качестве движущего органа пневматический цилиндр, а в качестве элемента, воздействующего на нагрузку, – гидравлический цилиндр, возникнет пневмогидравлический привод. Пневмогидравлические приводы являются весьма эффективным средством получения больших усилий выходного звена при использовании сжатого воздуха низкого давления цеховых магистралей (0,4– 0,6 МПа). Пневмогидравлические приводы по сравнению с гидравлическими имеют ряд преимуществ. 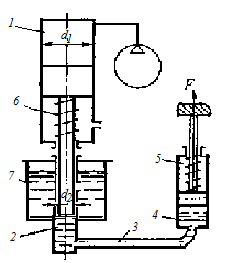 Исходной энергией в пневмогидравлических приводах является потенциальная энергия сжатого воздуха, получаемого из компрессорных установок. Воздух в систему поступает через пневмораспределители. Принцип действия показан на рис. Пневмонасос создает рабочее давление воздуха 0,5…0,6 МПа. Сжатый воздух подается в цилиндр 1, шток которого является поршнем гидроцилиндра 2.Масло из цилиндра 2поступает по трубопроводу 3в гидроцилиндр 4,шток которого создает силу F.Обратный ход поршней цилиндров 1и 4 происходит за счет усилий пружин 5и 6. Если рабочий ход поршней велик, то обратный ход может осуществляться сжатым воздухом. Резервуар 7предназначен для пополнения утечек масла в системе. Конструктивно вся схема может быть реализована либо в виде единого блока, либо с отдельно вынесенным гидроцилиндром 4. Во втором случае компактный цилиндр 4устанавливают вместе с исполнительным органом, а блок цилиндров 1и 2располагают вне рабочей зоны оборудования. Исходной энергией в пневмогидравлических приводах является потенциальная энергия сжатого воздуха, получаемого из компрессорных установок. Воздух в систему поступает через пневмораспределители. Принцип действия показан на рис. Пневмонасос создает рабочее давление воздуха 0,5…0,6 МПа. Сжатый воздух подается в цилиндр 1, шток которого является поршнем гидроцилиндра 2.Масло из цилиндра 2поступает по трубопроводу 3в гидроцилиндр 4,шток которого создает силу F.Обратный ход поршней цилиндров 1и 4 происходит за счет усилий пружин 5и 6. Если рабочий ход поршней велик, то обратный ход может осуществляться сжатым воздухом. Резервуар 7предназначен для пополнения утечек масла в системе. Конструктивно вся схема может быть реализована либо в виде единого блока, либо с отдельно вынесенным гидроцилиндром 4. Во втором случае компактный цилиндр 4устанавливают вместе с исполнительным органом, а блок цилиндров 1и 2располагают вне рабочей зоны оборудования. Площадь поршня пневмоцилиндра 1 может быть во много раз больше площади плунжера гидроцилиндра 2. Поэтому создается достаточное высокое давление жидкости и соответственно большое усилие F. Подобные устройства широко используются в станочном оборудовании для быстрого и сильного зажима изделия или в тормозах транспорта. В таких устройствах в большинстве случаев необходим быстрый подвод к зажимаемому изделию с относительно большим ходом и малым усилием, а в конце хода—максимальное усилие при отсутствии перемещения. Такие устройства широко используются. Принцип их действия заключается в том, что при отсутствии сопротивления со стороны нагрузки в рабочий цилиндр подается большое количество жидкости при малом давлении. Системы пневмогидропривода имеют следующие достоинства 1. Создают и поддерживают в течение длительного времени высокое давление масла без расхода энергии и образования тепла в гидросистеме. Сжатый воздух расходуется только при перемещении поршней гидроцилиндров (например, при зажиме заготовок и разжиме готовых деталей). 2. Управление гидросистемой производится в пневмосистеме. Это сокращает использование дорогостоящих распределителей и регулирующей аппаратуры. 3. Пневмогидроприводы более компактны и просты, чем идентичные им гидравлические приводы. Это позволяет располагать их в любой части оборудования или около него. 4. Отсутствие вращающихся частей в приводе увеличивает его ресурс. Электрогидропривод также используется для переменных режимов движения и усилий. В этом случае есть возможность в местах изменения скоростей или давлений установить компактные электрические датчики, позволяющие производить переключение золотников и других устройств, в том числе насосов высокого и низкого давления, так, чтобы обеспечить необходимый цикл работы. Использование комбинированных приводов настолько выгодно, что промышленностью выпускаются унифицированные гидропанели, позволяющие создавать необходимую конффигурацию приводов. 2.4 Приводы промышленных роботов Промышленные роботы выполняют с электрическими, гидравлическими, пневматическми и комбинированными приводами в зависимости от назначения, грузоподъемности, условий эксплуатации, вида системы управления. Промышленный робот должен обладать быстродействием, высокими энергетическими показателями, точностью перемещений в условиях меняющейся нагрузки. В роботах с грузоподъемностью до 20 кг с цикловой системой управления используют пневматический привод. Особенно это удобно при позиционировании по упорам и не нужны датчики положения. При грузоподъемности более 10… 20 кг преимущественно применяют гидропривод. Это связано с большой энергоемкостью, стабильной скорости при переменной нагрузке, малой инерционностью и высокой точностью позиционирования. Кроме того насосную станцию можно разместить вдали от рабочей зоны, пространство которой ограничено. В промышленных роботах с числовыми системами управления могут применяться электрогидравлические приводы с большим количеством датчиков как по положению, так и по скорости или усилию. Электрический привод применяют в тех случаях, когда роботы некритичны к габаритам двигателя. Особенно подходят для этого шаговые двигатели, двигатели постоянного тока. Электродвигатели обладают бесшумностью, простотой регулирования, надежностью, точностью, экономичностью, простотой монтажа и низкой металлоемкостью конструкций. Р 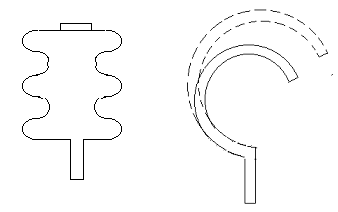 оботы обладают большим количеством степеней свободы. Обычно для каждого из перемещений используется отдельный привод. Стараются привод выполнить однотипным. Однако в некоторых случаях приходится применять два типа приводов. Особенно удобно применять в роботах пневмопривод, элементы которого обладают малыми размерами, легко управляются и обслуживаются, достаточно дешевы. При этом часто используется вакуумный привод. Особенно оправдывает себя использование пневмоприводов в захватах роботов небольшой грузоподъемности. оботы обладают большим количеством степеней свободы. Обычно для каждого из перемещений используется отдельный привод. Стараются привод выполнить однотипным. Однако в некоторых случаях приходится применять два типа приводов. Особенно удобно применять в роботах пневмопривод, элементы которого обладают малыми размерами, легко управляются и обслуживаются, достаточно дешевы. При этом часто используется вакуумный привод. Особенно оправдывает себя использование пневмоприводов в захватах роботов небольшой грузоподъемности.В захватах создаются небольшие перемещения. Для этого могут использоваться гидроцилиндры небольшой длины, пневмомускулы, сильфоны, трубки Бурдона и др. Пневмомускулы представляют собой эластичные трубки, к которым с одной стороны подается воздух. За счет увеличения диаметра трубка укорачивается, создавая перемещение. Сильфоны (см. рис.) укорачиваются или удлиняются в зависимости от того, подано в них давление или вакуум. Трубка Бурдона распрямляется или скручивается в зависимости от того, давление или вакуум подается в нее. Такой захват особенно удобен, если необходимо перемещать предмет из хрупкого материала цилиндрической формы. Использование вакуума особенно удобно в помещениях с ограниченным содержанием пыли Условные обозначения гидро и пневмоэлементов 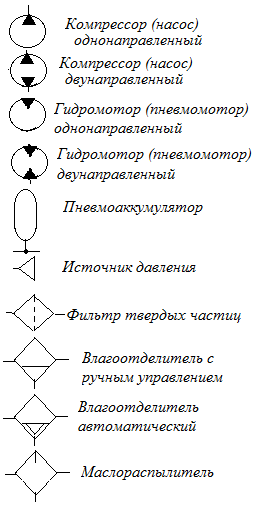 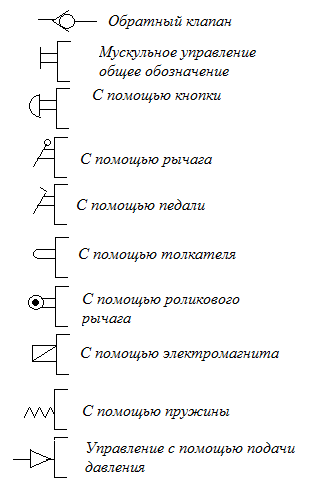    Литература 1 К.М. Холин, О.Ф.Никитин. Основы гидравлики и объемные гидроприводы. М. Машиностроение 1989 Ю.Н. Исаев , В.П. Коренев Гидравлика и гидро и пневмопривод М. Академия, 2009 А.В.Лепешкин, А.А. Михайлин. Гидравлические и пневматические системы М. Акаде - мия, 2007 Л.С.Столетов и др. Основы гидравлики и гидропривод станков 5 Ф.М. Долгачев, В.С. Лейко. Основы гидравлики и гидропривод. М. Стройиздат 1981 |