Конспект лекций РиКМОНГП. Конспект лекций по дисциплине Расчет и конструирование машин и оборудования нефтяных и газовых промыслов Для специальности
 Скачать 2.08 Mb. Скачать 2.08 Mb.
|

|
Определение передаточных отношений механизмов При разработке кинематических схем необходимо предварительно установить величины передаточных отношений и взаимное расположение валов, затем произвести ориентировочный прочностной расчет передач, после чего следует откорректировать полученные результаты. Сначала задаются частотами вращения конечных звеньев кинематической цепи: буровых насосов, лебедки и ротора. Затем выбирают двигатели и устанавливают частоты вращения валов трансмиссии. Валы буровых насосов имеют одну или две ступени частоты вращения. При выборе кинематической цепи привода насоса сначала устанавливают общие передаточные отношения передач: Обычно выбирают две-три ступени передач. При двухступенчатой передаче в первой ступени обычно применяют цепную или клиноременную передачу с передаточным отношением u12≤4. Вторая ступень зубчатая, реже цепная, с передаточным отношением u34≤6, размещается в корпусе насоса. П  ри трехступенчатой передаче первая ступень обычно гидравлическая, реже зубчатая, с передаточным отношением и12 ≈ l,3÷l,8; часто применяют и цепные передачи. Остальные ступени аналогичны двухступенчатой передаче. ри трехступенчатой передаче первая ступень обычно гидравлическая, реже зубчатая, с передаточным отношением и12 ≈ l,3÷l,8; часто применяют и цепные передачи. Остальные ступени аналогичны двухступенчатой передаче.При разработке кинематической цепи привода лебедки сначала выбирают число и структуру частот вращения подъемного вала. Если лебедка и ротор приводятся от одной общей коробки передач, то структуру частот вращения выбирают такой, чтобы удовлетворить техническим требованиям лебедки и ротора. После этого устанавливают передаточные отношения между подъемным валом пли ведущим валом пд. Пределы передаточных отношений для различных буровых установок довольно широкие: при низшей частоте вращения плн при высшей частоте вращения плв Меньшие значения соответствуют низкочастотным и мощным двигателям и высокочастотным лебедкам; большие значения соответствуют высокочастотным двигателям и низкочастотным лебедкам. Для установления предварительных значений передаточных отношений можно использовать аналитический или графоаналитический способ. Последний значительно проще и нагляднее, позволяет быстрее отыскивать возможные варианты решения и уменьшает вероятность ошибок по сравнению с аналитическим. Рассмотрим графоаналитический способ определения передаточных отношений. По этому способу последовательно используют графики частот вращения (рис. 3.13) и структурную сетку (рис. 3.14), например, четырехступенчатого пятивального привода буровой лебедки. Структурная сетка необходима для выявления возможных вариантов (последовательностей) переключений передач и выбора передаточных отношений; при помощи графика частот вращения устанавливают величины передаточных отношений. График частот вращения указывает, как осуществляются пер  еключения коробки передач для получения всех частот вращения. еключения коробки передач для получения всех частот вращения.График частот вращения состоит из ряда параллельных прямых I-V, наносимых на произвольных равных расстояниях; каждая прямая соответствует одному валу механизма, следовательно, число этих прямых равно числу валов механизма. На каждой прямой отмечаются точками частоты вращения п соответствующего вала при всех возможных переключениях передач. Положение каждой точки определяется ее абсциссой, откладываемой от произвольно выбранного начала координат. Любая перпендикулярная к прямым I-Vлиния пересекает их в точках, изображающих одну и ту же частоту вращения. Для геометрических рядов частот вращения будет справедливо равенство где пi,пi+1 - частоты вращения предыдущего и последующего валов; φ - знаменатель геометрической прогрессии ряда последовательностей частот вращения. Если на прямых графика откладывать частоты вращения в логарифмическом масштабе, то расстояния между соседними точками, обозначающими различные частоты вращения вала, соответствующего этой прямой, будут равны между собой. Если структурный ряд частот вращения образуется геометрическим рядом, то расстояние между соседними точками равно lg φ (точки на прямых графика частот вращения обозначены вместо lg пi просто пi. Луч, соединяющий какую-либо точку частоты вращения одной прямой графика с точкой другой прямой, символически изображает определенную передачу (зубчатую, цепную, клиноременную) между теми двумя валами установки, которым на графике отвечают эти две связанные лучом прямые, и одновременно величину передаточного отношения этой передачи. Действительно, если расстояние между точками п1и п2, отсчитываемое вдоль прямых графика, равно х делениям, то Очевидно, что х>0, если n2> п1,х<0, если п2< п1. Значения пiпринято откладывать слева направо, поэтому и21 = n2/п1= φх, если точка п2(для ведомого вала) лежит правее точки п1,и и22 — п2/п1 = φ–х, если точка п2лежит левее точки п1. График частот вращения позволяет установить ряд основных признаков, характеризующих кинематическую схему механизма, кроме того, передаточные отношения всех передач и частот вращения валов при всех возможных переключениях коробки передач. График указывает также на способ получения всех час тот вращения вала Vи на порядок переключений. Из графика видно, что  (3.8) т. е. основными являются группы передач и1и и2между валами I, II, III; и3, и4 и и5 между валами III и IV. Структура частот вращения вала Vнесколько отличается от геометрического ряда, так как расстояния между n51 и n52, n53 и n54 и т. д. не равны между собой (см. рис. 3.9). Очевидно, что те же частоты вращения вала Vможно получить и при других значениях передаточных отношений. Составляют несколько таких вариантов и выбирают наилучший в конструктивном и кинематическом отношениях. Как видно, приведенный вариант не очень удачен, так как передаточные отношения между валами IIи III слишком большие, что вынудило применить между валами III и IVповышающую передачу, а это не всегда целесообразно. Структурная сетка используется при разработке или анализе кинематических схем, выявлении возможных вариантов переключения передач и выборе относительных величин передаточных отношений в механизмах с КПП. Структурная сетка внешне отличается от графика частот вращения (рис. 3.13) тем, что на нем наносятся знаменатели прогрессии ряда частот вращения валов. На рис. 3.14 приведена структурная сетка пятивального механизма того же, что и на рис. 3.13. Структурная сетка позволяет решить вопрос о возможности конструктивного осуществления механизма с кинематической схемой при намеченном порядке переключений передач и выбранном соотношении передаточных отношений иmах/итin. Например, если бы было нельзя осуществить конструктивно КПП по схеме рис. 3.13, то ее нельзя было бы осуществить и по другой схеме, так как отношение итах/итinпостоянно. Структурную сетку строят следующим образом: на график наносят на равных расстояниях параллельные линии I-V. Затем середины линий IиIIсоединяют прямой, так как валы IиIIимеют постоянные частоты вращений п1и п2. Между валами IIIи IVимеются три передачи, и на валу IVможет быть осуществлено три ступени частот вращения п41, п42, и п43со знаменателями прогрессии φ1=п42/п41. Величина φ1откладывается влево, точки п3и п42 соединяются вертикальным отрезком, а величина знаменателя прогрессии φ2=п43/п42 откладывается вправо от точки п42до точки п43. Валы IVи Vсоединены двумя передачами, и на валу Vможет быть получено шесть частот вращения. От перпендикуляров, опущенных из точек п41, п42и п43на линию вала V, откладываются влево и вправо величины знаменателей прогрессии φ3, φ4 иφ5. В результате на линии вала Vполучаем шесть точек п51, п52, …, п56, которые соединяются с точками п41, п42, и п43. Расстояния между точками п51, п52, …, п56, будут равны знаменателям прогрессии ступеней частот вращений вала V. Величины φ откладываются по горизонтали по логарифмической сетке. Если бы кинематическая схема рассматриваемой установки была выполнена по геометрическому ряду, то значения φ51= φ52=…=φ55=const. Из рассмотрения структурной сетки видно, что: механизм создает шесть ступеней частот вращения на последнем ведомом валу при постоянной частоте вращения первого ведущего вала; механизм - пятивальный с двумя постоянными передачами и двумя группами передач, причем первая из них, считая от направления передачи движения, состоит из трех ступеней, а вторая - из двух; для первой группы передач общее передаточное отношение u = φ1φ2, а для второй группы передач общее передаточное отношение и = φ51φ52 φ53φ54 φ55; для геометрического ряда было бы u = φ1k-1, где k- число ступеней. Из изложенного можно сделать заключение, что для определения передаточных отношений u1установки следует:
построить график частот вращения для выбранного варианта, руководствуясь предельно допустимыми передаточными отношениями; этот график даст окончательные абсолютные значения передаточных отношений всех механизмов установки. 3.2 Анализ и синтез компоновочных схем оборудования скважинных штанговых насосных установок для добычи нефти применительно к заданию на проектирование 3.2.1 Назначение и область применения Из всех существующих механизированных способов добычи нефти в нефтедобывающей промышленности штанговый насосный способ является наиболее массовым. С помощью штанговых скважинных насосных установок (УШСН) эксплуатируется около 60 тысяч скважин, в т.ч. почти треть из них в Татарстане. Штанговая скважинная насосная установка состоит из трех принципиально различных частей - скважинного насоса, насосных штанг и наземного привода. Самая «консервативная» часть всей установки, находящаяся в эксплуатации наибольшее время, - наземный привод, в подавляющем большинстве установок представленный в виде станка-качалки. Фактический срок службы наземного оборудования, исходя из мирового опыта, составляет 20-30 лет. Этим объясняется одновременное наличие в эксплуатации оборудования, выпускавшегося по различным нормативным документам, естественно меняющимся за такой продолжительный период. До 1991 г. головной организацией по проектированию и разработке всей документации на станки-качалки являлся АзИН-МАШ (г.Баку) и все оборудование установок монопольно производилось только в Азербайджане. В 1987 г. указанной организацией был разработан последний стандарт на станки-качалки. В последние годы на производство станков-качалок были переклюю-чены российские предприятия, в числе которых и ранее входившие в военно-промышленный комплекс, - Ижевский механический завод (АО «Ижнефтемаш»), Ижевский завод «Редуктор» (ОАО «Редуктор»), завод Уралмаши ГПО «Уралтрансмаш» (г.Екатеринбург), АО Мотовилихинские заводы (торговый дом «Мотовилихинский», г.Пермь), предприятие «Вакууммаш» (г.Казань), а также Нефтепроммаш (г.Ахтырка Сумской области). Появление нескольких производителей однотипного оборудования способствует увеличению разнообразия конструктивных решений и улучшению качества изделий на конкурентной основе. За последние годы наблюдается тенденция пересмотра традиционных решений, что нашло отражение, в частности, во внедрении станков-качалок дезаксиального типа, в появлении отечественных станков-качалок с одноплечим балансиром, которые во времена монополии АзИНМАШа не изготовлялись. Можно предполагать, что в ближайшие годы более широко будут проводиться эксперименты по внедрению принципиально отличных от станков-качалок наземных приводов — тихоходных и длинноходовых безбалансирных и гидроприводных с различным видом уравновешивания. С точки зрения экономических возможностей СШНУ могут обеспечить высокий напор в ограниченном диапазоне подач от 5 до 50 м3/сут. В области подач от 1 до 40 м3/сут СШНУ имеет более высокий КПД по сравнению с другими способами добычи нефти и при подаче, равной 35 м3/сут, он может достигать максимального значения (37%). Таким образом, СШНУ хорошо приспособлена для работы в условиях малого и среднего дебита скважин. Однако, в некоторых случаях подача может достигать 200 м3/сут и глубины подвески насосов достигают 2500 м. Независимо от конструкций основных узлов, для всех СШНУ характерны следующие особенности: 1) значительное удаление гидравлической части насоса от механической, т.е. плунжера с цилиндром от кривошипно-шатунного механизма; 2) вертикальное расположение основных элементов установки; 3) малый поперечный (диаметральный) размер деталей, входящих в гидравлическую (подземную) часть установки. Все это в свою очередь обусловливает следующие явления, неблагоприятные для работы СШНУ.
За время полного оборота кривошипа, т.е. за время одного цикла работы глубинного насоса, происходит подъем и опускание штанг. При этом при ходе штанг вверх двигатель привода должен затратить дополнительную работу по подъему штанг —  увеличению их потенциальной энергии. Полезная работа двигателя при ходе вверх расходуется на подъем жидкости. увеличению их потенциальной энергии. Полезная работа двигателя при ходе вверх расходуется на подъем жидкости.Для обеспечения хода штанг вниз не нужно совершать дополнительной работы - колонна опускается вниз силой собственного веса, а приводной двигатель при этом работает вхолостую. Для обеспечения равномерной нагрузки двигателя за время двойного хода и уменьшения его мощности привод СШНУ снабжают уравновешивающим устройством (в данном случае — грузы на правом плече балансира), назначение которого аккумулировать энергию, получаемую от приводного двигателя и штанг, при ходе плунжера вниз и отдавать ее при ходе штанг вверх. 3.2.1 Синтез компоновочных схем оборудования скважинных штанговых насосных установок для добычи нефти Наземный привод - наиболее сложная часть УШСН, которая должна выполнять следующие функции: - создавать возвратно-поступательное движение колонны насосных штанг с необходимым темпом; - обеспечивать силовое уравновешивание системы подъема продукции пласта; - допускать регулирование режима откачки продукции; - позволять осуществление технического диагностирования скважинного оборудования без остановки процесса отбора продукции. Из огромного разнообразия принципиально возможных технических средств, способных осуществлять указанные функции, наибольшее распространение во всем мире получил привод механического принципа действия, названный у нас балансирным станком-качалкой. Интересно отметить, что основная деталь - балансир, давшая название всему приводу, должна была бы в соответствии с теорией механизмов и машин правильно называться коромыслом, но это название не привилось. Балансиры выполняются либо в виде рычага первого рода и тогда станки-качалки считаются механизмами с двуплечим балансиром (рис. 1, а), либо в виде рычага второго рода и тогда станок-качалка будет с одноплечим балансиром (рис.1, б). В станках-качалках с двуплечим балансиром опора балансира С находится посредине - между точкой подвеса штанг D и точкой сочленения шатуна с балансиром В, тогда как в станках-качалках с одноплечим балансиром опора С расположена на конце балансира, а точка В - посредине. Механизмы с двуплечим балансиром и механической системой уравновешивания часто для отличия от всех остальных называют обычными. 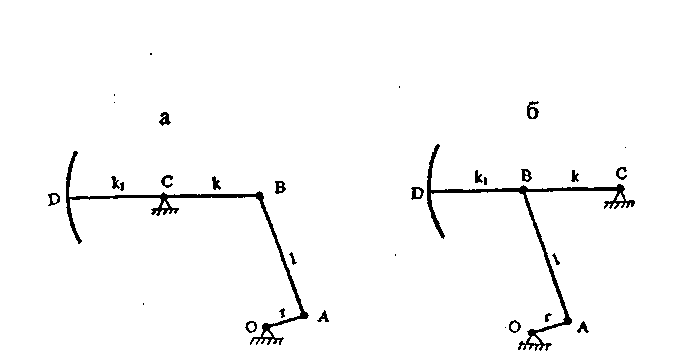 Рис.3.15. Балансирные станки-качалки: а-с двуплечим балансиром; б-с одноплечим балансиром Полную механическую схему любого обычного станка-качалки (рис.3.15) можно разделить на механическую трансмиссию и преобразующий механизм. Трансмиссия - совокупность деталей и механизмов, передающих вращающее движение от двигателя к преобразующему механизму. В станках-качалках трансмиссией можно назвать кинематическую цепь между двигателем и осью вращения кривошипа, служащую для снижения высокой частоты вращения, создаваемой двигателем, до требуемой небольшой частоты вращения кривошипа преобразующего механизма. В свою очередь последняя определяет число двойных ходов балансира станка-качалки в единицу времени. Трансмиссия может включить от одной до нескольких механических передач и возможных конструктивных комбинаций компоновки трансмиссий очень много. Практически же наиболее типичная трансмиссия состоит из сочетания клинорсменной передачи и зубчатого редуктора, как это показано на рис.3.16. 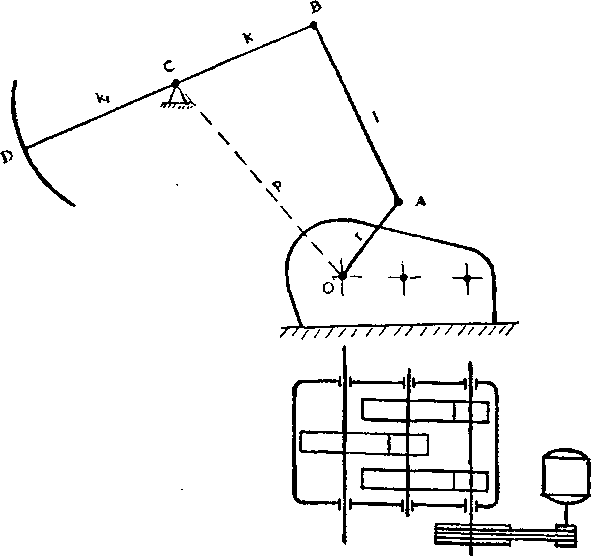 Рис. 3.16 Кинематическая схема станка-качалки Преобразующий механизм служит для преобразования вращательного движения на валу кривошипа в возратно-поступательное движение точки подвеса штанг. В подавляющем большинстве установок преобразующий механизм представляет собой по точному определению сдвоенный шарнирный четырехзвенный кривошипно-коромысловый механизм с одностронним коромыслом. Как уже было сказано, механизм обычно называют кривошипно-шатунным балансирным. Четырсхзвснник ОАВС образуется подвижными звеньями в виде кривошипа ОА= г, шатуна АВ = 1, заднего плеча балансира ВС = k и неподвижным звеном ОС, представляющим собой рас- стояние между осями вращения кривошипа О и качания балансира С. В расчетах неподвижное звено ОС обозначается через р и носит название полюсного расстояния или базы. Практически это расстояние определяется относительным расположением редуктора и опоры балансира на стойке. Четырехзвенный механизм определяет закон движения балансира. Переднее плечо балансира k1 на характере движения точки подвеса штанг не отражается, но влияет на длину ее хода. В станках-качалках применяют либо равноплечие балансиры с k1 = k, либо балансиры с удлиненным передним плечом k1 > k, позволяющим получить увеличенную длину хода при одинаковом четырехзвенном механизме. 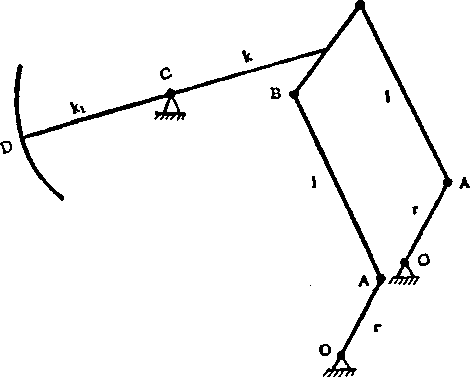 Рис.3. 17 Кинематическая схема преобразующего механизма станка-качалки в аксонометрии Из схемы видно, что каждое плечо балансира - коромысла может совершать качательные движения только по одну сторону от вертикали, проходящей через центр качания С, поэтому дан ный механизм считается односторонним. Механизм станка-качалки является сдвоенным, т.к. движение от редуктора к балансиру осуществляется двумя параллельно работающими кривошипно-шатунными механизмами, связанными с балансиром посредством поперечной траверсы ВВ (рис.3.17). Это создает симметричное распределение нагрузки на весь механизм, делает установку более устойчивой и позволяет избежать неблагоприятное консольное приложение нагрузки к балансиру, кривошипу, редуктору. Станок-качалка представляет собой механизм с одной степенью свободы, поэтому закон движения балансира и связанной с ним колонны насосных штанг определяется геометрическими и кинематическими параметрами преобразующего механизма: размерами, взаимным расположением подвижных и неподвижного звеньев, соотношением звеньев r /l, r/k, r/p, k1/k и скоростью вращения кривошипов. В зависимости от расположения центра вращения кривошипов (точки О) относительно точки В сопряжения шатунов с балансиром механизм станков-качалок может быть аксиальным или дезаксиальным, что отражается на эксплуатационных показателях штанговой установки. |