Основы проектирования. Контрольная работа по дисциплине Основы проектирования гибких автоматизированных линий и участков Форма обучения заочная
 Скачать 426.37 Kb. Скачать 426.37 Kb.
|

4.7 Компоновка станочного комплекса и АТСССхема компоновки станочного комплекса и автоматической транспортно-складской системы, принятая для разработки, приведена на рис. 4.5. 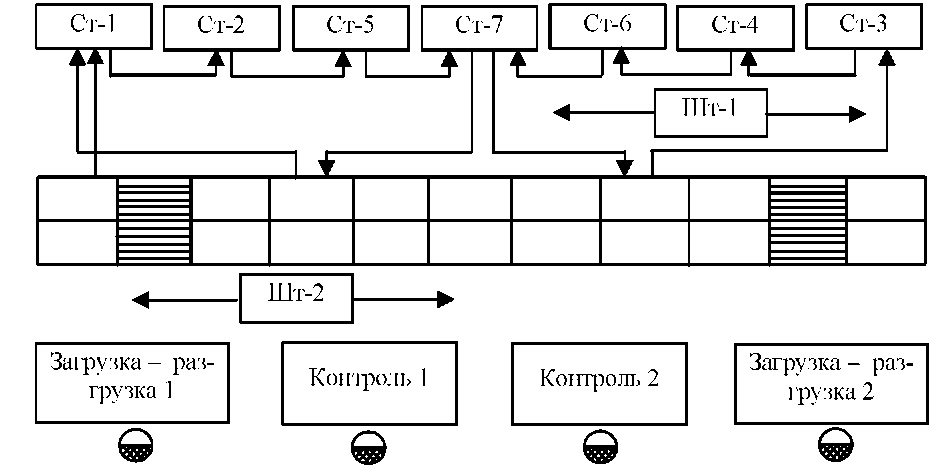 Рис. 4.5 – Схема компоновки станочной и транспортной систем ГПС со станками, сгруппированными по технологическому признаку и двухрядным одноярусным стеллажом-накопителем с объединенными функциями позиции загрузки - разгрузки спутников, принятая для разработки Станки расположены в линию и сгруппированы по технологическому принципу. Стеллаж вместимостью 168 ячеек двухрядный одноярусный вытянут вдоль всей линии станков. По другую сторону стеллажа располагаются четыре позиции: две из них выполняют со¬вмещенные функции загрузки и разгрузки спутников, две другие выполняют контроль деталей. С каждой стороны стеллажа перемещаются по одному штабелеру одинаковой конструкции, которые передают спутники со стеллажа на станки или на позиции загрузки-разгрузки и контроля обратно. 5. Определение структуры и состава автоматической системы инструментального обеспечения В состав АСИО входят: центральный магазин инструментов и транспортные механизмы в виде роботов - автооператоров по обслуживанию станочных магазинов-инструментов и линий накопителя центрального магазина инструментов. Выбранная для разработки структура АСИО показана на рис. 5.1. 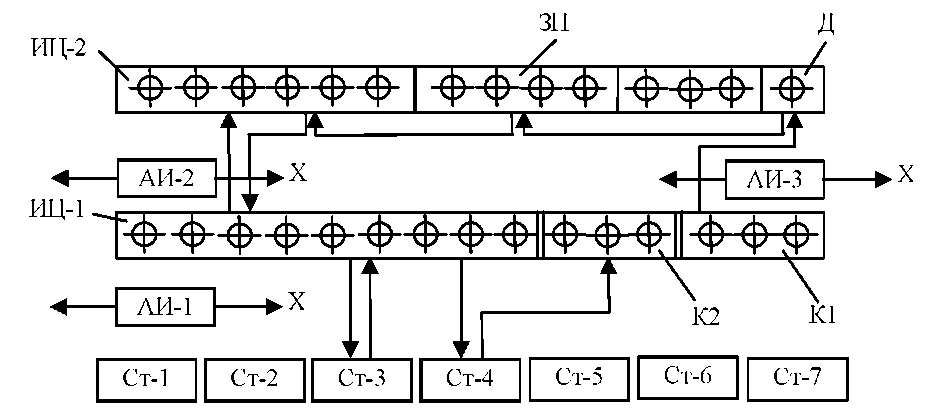 Рис. 5.1 – Схема компоновки АСИО ГПС корпусных деталей, принятая для разработки: ИЦ-1, ИЦ-2 - линии накопителя центрального магазина инструментов; АИ-1 - робот-автооператор со стороны станочного комплекса СТ-1 - СТ-7; АИ-2, АИ-3 - роботы-автооператоры между линиями накопителя; ЗП - переходная зона роботов АИ-2 и АИ-3; Д - инструментальное гнездо с кодовым устройством; К1, К2 - подъемные кассеты инструментов 5.1 Определение вместимости центрального магазина инструментовНа станочном комплексе осуществляется обработка деталеустановок Кдет=152 наименований. Средняя трудоёмкость обработки одной деталеустановки составляет tоб = 0,75 ч. Принимаем среднее время обработки одним инструментом tин = 4 мин и среднее число дублеров инструмента на каждую деталеустановку nд = 2. Число основных инструментов и их дублеров для обработки месячной программы деталеустановок на станочном комплексе составит: Число дублеров инструмента для обработки месячной программы деталеустановок Суммарное число инструментов, необходимых для обработки 152 наименований деталей составит в месяц: Определив число необходимых инструментов на комплексе Kин, можно рассчитать размеры стеллажа инструментов. При двухрядном расположении стеллажа длина склада Lск: В каждом из магазинов станков комплекса располагается по 60 инструментов. Таким образом, в магазинах семи станков можно расположить 60⋅7 = 420 инструментов. Оставшиеся 2000 − 420 = 1580 инструментов при длине инструментального склада lc = 50 м и шаге между инструментальными гнездами tг = 125 мм можно расположить в центральном магазине инструментов, для чего потребуется число рядов накопителей инструмента: Расположение склада инструментов при одноярусном двухрядном накопителе (рис. 4.6) – наиболее удобном для обслуживания. При такой компоновке в центральном магазине может находиться: Оставшиеся 1580-800=780 инструментальные наладки следует расположить в специальном отделении для подготовки инструмента и по мере возникновения необходимости подавать их в центральный магазин вместо выводимого для осуществления обработки деталей. Ввод и вывод инструментов из центрального магазина осуществляется подъемными инструментальными кассетами К1, К2, к которым инструмент подается из отделения его подготовки (см. рис. 4.6). 5.2 Определение производительности подвижных инструментальных кассетДля установки Kин=2000 инструментов, необходимых для обработки деталей, и последующей их замены при запуске деталей полумесячными партиями (m =1,5) расчётная производительность кассет составит: Среднее время работы инструмента составляет tин = 4 мин, время его смены tсм = 2,5 мин. Таким образом, при среднем времени нахождения в комплексе каждого инструмента При периодичности подъема кассеты в один час принимаем число подвижных кассет равным двум по пять гнезд в каждой кассете (см. рис. 5.1). 5.3 Расчет числа роботов-автооператоров, расположенных со стороны станков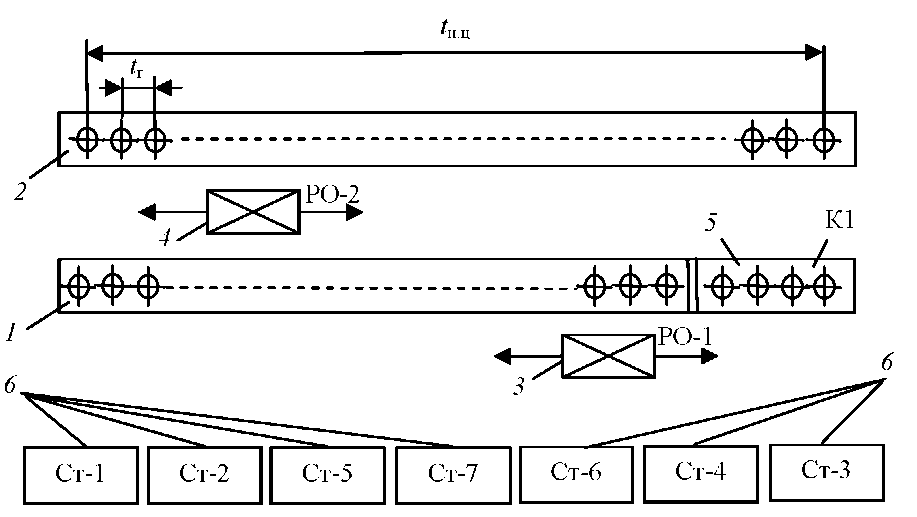 Рис. 5.2 – Предварительная схема компоновки АСИО с центральным складом-накопителем инструментов:1, 2 – накопители инструментов; 3, 4 – роботы-автооператоры доставки инструментов, расположенные соответственно со стороны станков РО-1 и между накопителями РО-2; 5 – подъемная кассета инструментов К1; 6 – станочный комплекс ГПС Для обработки деталей всех наименований Kин=2000 инструментов. Коэффициент, учитывающий партионность запуска, равен m =1,5. Число неразмещающихся инструментов в магазинах комплекса составляет Суммарное число смен инструмента на комплексе в течение месяца Принимаем: tк=0,15 мин; lср=20 м; tв=tп=0,2 мин; tпов=0,05 мин; V=60 м/мин, среднее время смены одного инструмента Суммарное время, затрачиваемое роботом РО-1 (рис. 4.7) на обеспечение станочного комплекса необходимым инструментом в течение месяца, составит Число роботов-автооператоров РО-1 (рис. 4.7), обслуживающих станки 5.4 Расчет числа роботов-автооператоров, расположенных между линиями накопителей центрального магазинаЧисло вводимого и выводимого инструмента в связи с неразмещением его полностью на комплексе: При tк=0,15 мин; lср=20 м; tв=tп=0,2 мин; tпов=0,05 мин; V=60 м/мин и tч.п=0,1 мин, среднее время одного ввода–вывода инструмента составит:  (5.10) (5.10)Время, которое необходимо затратить роботу-автооператору РО-2 (рис. 5.2) на ввод и вывод инструмента из комплекса составит: Часть инструмента (1/3), подаваемого кассетой, сразу же устанавливается в линию накопителя, ближайшего к станкам. Другая часть (2/3) по мере необходимости меняется с первой. Суммарное число замен инструментов между линиями центрального магазина составит: Среднее время одной смены инструмента Время, необходимое на обмен инструментов между линиями накопителей ИЦ1 и ИЦ2 составит: Тогда суммарное время, затрачиваемое роботами на обслуживание линий накопителя а их количество Таким образом, для осуществления надежной работы роботов-автооператоров, установленных между линиями накопителей центрального магазина инструментов, необходимо использовать два робота и разделить их между собой передаточной зоной функционирования ЗП (см. рис. 5.1). ЗаключениеВ гибких автоматизированных производствах реализуются основные направления научно-технического прогресса в промышленности: интеграция управления, проектирования и изготовления изделий на основе высокого уровня автоматизации; совершенствование организации производства и его подготовки; внедрение ЭВМ для решения проектных и производственных задач. При разработке новых автоматизированных производств и реконструкции существующих, на первый план выдвигается обоснование целесообразности капиталовложений, выбор оборудования, эффективность проектирования при условии, что обоснована номенклатура изделий подлежащих изготовлению в условиях гибкой производственной системы (ГПС), определены технологические маршруты, время обработки, контроль и пр. Особенно остро эти задачи стоят перед машиностроительной отраслью. Список использованной литературы1. Гибкие производственные комплексы / под ред. П.Н. Белянина и В.А. Лещенко. – М.: Машиностроение, 1984. – 384 с. 2. Справочник технолога-машиностроителя: в 2 т. / под ред. А.Г. Косиловой и Р.К. Мещерякова. – М.: Машиностроение, 1985. – Т. 1. – 656 с. 3. Основы автоматизации производства / под общ. ред. Ю.М. Соломенцева. – М.: Машиностроение, 1995. – 312 с. 4. Проектирование автоматизированных участков и цехов / под общ. ред. Ю.М. Соломенцева. – М.: Машиностроение, 1992. – 272 с. 5. Проектирование механосборочных цехов / под ред. А.М. Дальского. – М.: Машиностроение, 1990. – 352 с. 6. Станочное оборудование ГПС: справочник / под ред. Е.С. Пуховского. – Киев: Высшая школа, 1990. – 175 с. 7. Обработка металлов резанием: справочник технолога / под ред. А.А. Панова. – М.: Машиностроение, 1995. – 736 с. 8. Роботизированные комплексы "Оборудование–робот" стран-членов СЭВ. – М.: Изд-во НИИМАШ, 1984. – 171 с. 9. Операционная технология обработки деталей общемашиностроительного применения на токарных станках с ЧПУ: метод. рекомендации. – М.: Изд-во ЭНИМС, 1980. – 87 с. 10. РТМ2-Н80-3-80. Типовые проекты участков настройки инструментов вне станка и обслуживание инструментом участков станков с ЧПУ. – М.: Изд-во НПО "Оргстанкинпром", 1981. – 162 с. 11. Маликов, О.Б. Склады гибких автоматических производств / О.Б. Маликов. – Л.: Машиностроение, 1986. – 187 с. |