Курсовая работы по дисциплине Системы автоматического управления электроприводом. КР, гр. ЭГП-16-1, Патрушев В. А.. Курсовой проект по дисциплине Электротехнические комплексы и системы преобразования электроэнергии
 Скачать 1.92 Mb. Скачать 1.92 Mb.
|

2.4.2 МоделированиеВводные данные блока Asynchronous Machine модели представлены на рисунках 2.6 и 2.7. Результат моделирования – механическая характеристика АД, приведена на рисунке 2.8, где значения по оси Y – значения скорости вращения ротора, с-1, а значения по оси X – значения момента на валу АД, Н∙м. 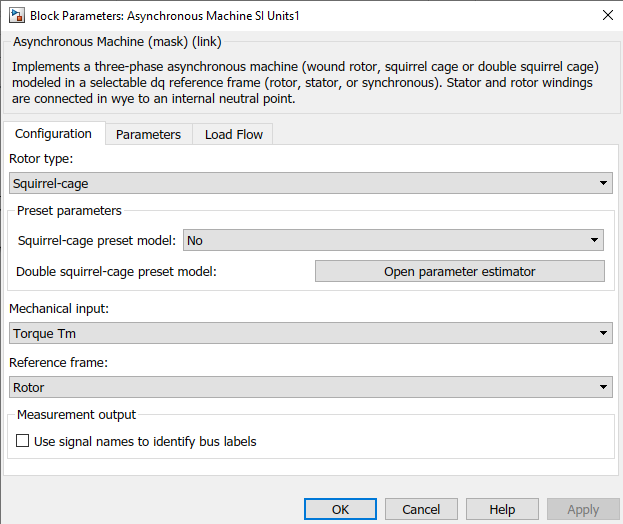 Рисунок 2.6 – Вводные данные блока АМ 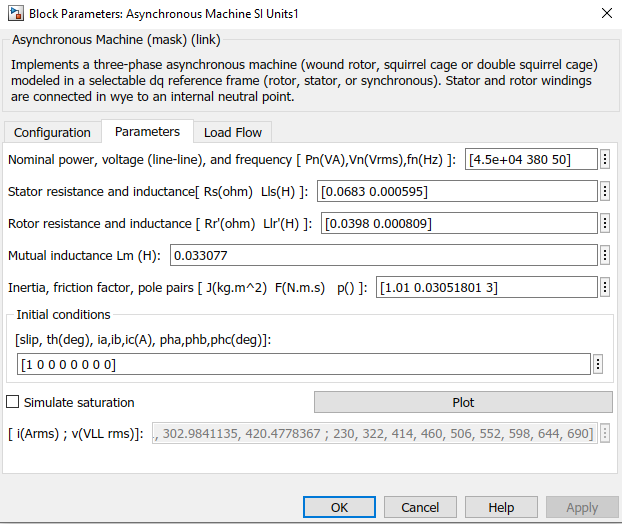 Рисунок 2.7 – Вводные данные блока АМ 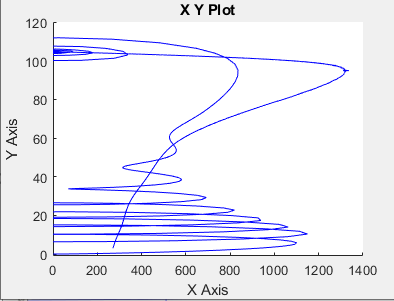 Рисунок 2.8 – Механическая характеристика АД На характеристике (рисунок 2.8) можно наблюдать максимальное значение момента, которое немного превышает значение 1300 Н∙м. Рассчитанное значение составляет 1307,5 Н∙м. Синхронная скорость вращения ротора на графике лежит между значениями в 100 и 110 рад/с. Рассчитанное значение составляет 104,72 рад/с. Заключение по разделу Смоделированные значения механической характеристики двигателя довольно близки к расчётным, также результаты расчётов соответствуют паспортным данным электродвигателя, что позволяет сделать вывод о том, что параметры схемы замещения асинхронного двигателя А250S6 рассчитаны верно. 3 Синтез и моделирование системы векторного управления электроприводом3.1 Расчёт параметров передаточных функций системы векторного управления с ориентацией по потокосцеплению ротораИсходные данные Исходными данными для расчёта, приводящегося в данном разделе курсовой, являются каталожные данные электродвигателя А250S6 и данные, которые были получены в результате расчёта, приведённого в разделе 2. Эти данные представлены в таблице 3.1. Таблица 3.1 – Параметры электродвигателя А250S6
Расчёт Синхронная скорость:  Номинальная угловая скорость вращения вала:  Момент инерции привода:  где  – моменты инерции ротора двигателя и приведённый к валу двигателя момент инерции механизма. – моменты инерции ротора двигателя и приведённый к валу двигателя момент инерции механизма.При отсутствии данных о механизме допускается принять приведённый к валу двигателя момент инерции механизма равным   Коэффициенты:      Коэффициент передачи (В/В) и постоянная времени (с) ТПЧ:   Главное потокосцепление:   Датчики сигналов обратной связи: - коэффициент передачи датчика тока:  - коэффициент передачи датчика скорости:  - коэффициент передачи потокосцепления:  Параметры структурной схемы САУ:     где  номинальный момент на валу двигателя: номинальный момент на валу двигателя:    Регуляторы векторной САУ Канал потока: ПИ-регулятор потока:     Канал скорости: ПИ-регулятор тока  : : так как  то: то:       П-регулятор скорости по техническому оптимуму:   ПИ-регулятор скорости по техническому оптимуму:        ПИ-регулятор скорости по симметричному оптимуму:     |
 м2
м2