Курсовая работы по дисциплине Системы автоматического управления электроприводом. КР, гр. ЭГП-16-1, Патрушев В. А.. Курсовой проект по дисциплине Электротехнические комплексы и системы преобразования электроэнергии
 Скачать 1.92 Mb. Скачать 1.92 Mb.
|

2.3 Определение параметров схемы замещения по паспортным данным асинхронного электродвигателяИсходные данные для расчёта: 1. Частота:  2. Число фаз:  3. Мощность:  4. Фазное напряжение:  5. Линейное напряжение:  6. Синхронная скорость АД:  7. Номинальная скорость:  8. Число пар полюсов:  9. КПД (  и коэффициент мощности ( и коэффициент мощности ( : :  10. Кратность пускового тока:  . .11. Кратность критического момента:  . .Расчёт: 1. Фазный ток:  2. Номинальное скольжение:  3. Критическое скольжение:  4. Коэффициент   примерно:  5. Механические потери:  6. Сопротивления:    7. Индуктивности:        2.4 Построение электромеханической характеристики двигателяДля построения механической характеристики использую метод моделирования режима стопорения электродвигателя. 2.4.1 Описание методики моделированияМоделирование будет производиться в пакете Matlab с использованием среды моделирования Simulink. Модель двигателя приведена на рисунке 2.5. Модель электродвигателя во вращающейся системе координат входит в набор блоков набора инструментов (toolbox) Simscape Electrical пакета Matlab. Вход модели электродвигателя подключён к источнику трёхфазного напряжения и блоку задания момента сопротивления на валу электродвигателя, выход модели – к блоку измерения выходных координат электродвигателя. Для моделирования режима торможения, который необходим для построения полной механической характеристики без учета динамической ошибки регулирования тока, применён блок интегратора, который обеспечивает линейное нарастание момента на валу, и блоки сравнения угловой скорости с нулевым значением и остановкой вычислений (Stop). Темп нарастания момента устанавливается усилителем. Сравнение с нулевой угловой скоростью должно быть выполнено только после разгона электродвигателя, поэтому используется блок сравнения времени со значением, необходимым для достижения электродвигателем номинальной частоты вращения (принято равным 3 с, может, требоваться увеличение до 5 с). Данная модель позволит получить механическую характеристику двигателя, входными данными являются мощность двигателя, линейное напряжение, частота сети, сопротивления и индуктивности обмоток статора и ротора, индуктивность цепи намагничивания, число полюсов, момент инерции. 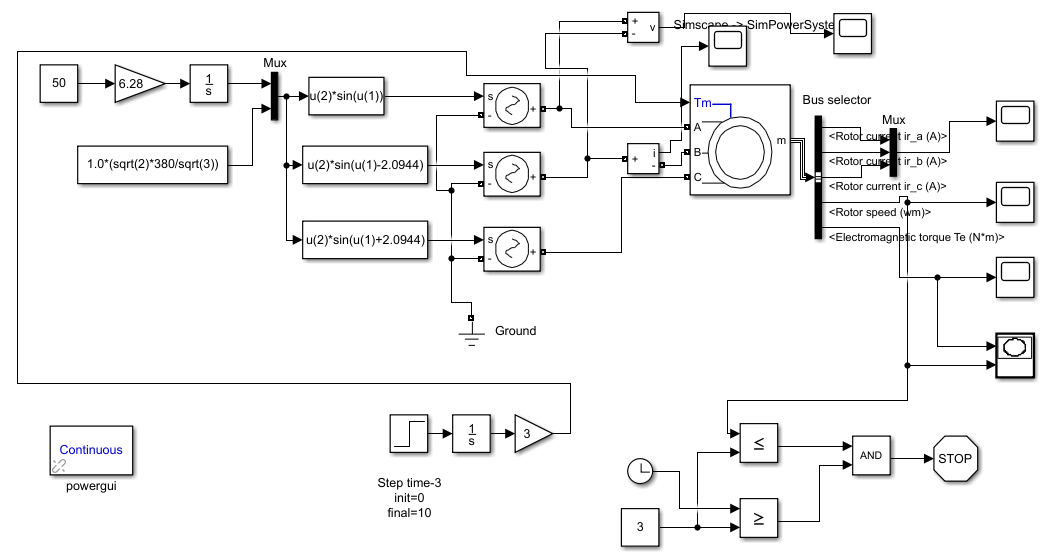 Рисунок 2.5 – Модель АД |