Курсовая работы по дисциплине Системы автоматического управления электроприводом. КР, гр. ЭГП-16-1, Патрушев В. А.. Курсовой проект по дисциплине Электротехнические комплексы и системы преобразования электроэнергии
 Скачать 1.92 Mb. Скачать 1.92 Mb.
|

ВведениеЦелью работы является получение практических навыков, необходимых инженеру при анализе и синтезе систем управления электроприводом переменного тока и логических систем управления электроприводом. Задачи работы состоят в изучении современных методов построения систем управления электроприводов переменного тока, способов описания и математических моделей электродвигателей переменного тока, методов и средств анализа и синтеза систем управления электроприводом переменного тока, методов средств построения бездатчиковых высокоточных систем управления электроприводом, методов анализа и синтеза логических систем управления электроприводом. 1 Синтез логической системы управления на основе ПЛК1.1 Описание комплекса в форме конечного автоматаМашины и механизмы могут находиться в различных состояниях и изменять свое состояние под воздействием событий. Такое представление процессов соответствует дискретной модели, что позволяет использовать методы, используемые в теории автоматов, для описания функционирования дискретных систем управления электроприводами. Автомат общее название устройств, предназначенных для обработки входной информации по заданному алгоритму с целью: - определения, принадлежит ли информация некоторому множеству; - порождения соответствующей выходной информации; - выработки соответствующих управляющих воздействий. Цели могут быть достигнуты отдельно или в совокупности. Поведение автомата полностью определено, если заданы множества  , и функции δ и , и функции δ и  , ,  где  множество состояний автомата; множество состояний автомата;  множество входных сигналов; множество входных сигналов;  множество выходных сигналов; множество выходных сигналов; функция переходов в следующее состояние; функция выходов. функция переходов в следующее состояние; функция выходов.Функции и есть декартово произведение множеств на . Разновидность автомата, в котором рассматривают только функцию переходов : , называют конечным автоматом при условии, что множество состояний Q конечно [1]. , называют конечным автоматом при условии, что множество состояний Q конечно [1]. В данной курсовой работе я составлю описание нереверсивного и реверсивного электроприводов комплекса приводного агрегата с высоковольтным двигателем (схема представлена на рисунке 1.1) как конечных автоматов в трёх формах: диаграммы переходов, таблицы переходов, функции переходов и выходов. 1.1.1 Исходные данныеНа схеме (рисунок 1.1):  – асинхронный двигатель с фазным ротором; – асинхронный двигатель с фазным ротором;  – привод масляного насоса системы принудительной смазки; – привод масляного насоса системы принудительной смазки;  – сервопривод устройства замыкания ротора накоротко и подъема щеток (УЗЩ); – сервопривод устройства замыкания ротора накоротко и подъема щеток (УЗЩ);  – привод вентилятора для форсированного воздушного охлаждения асинхронного двигателя; – привод вентилятора для форсированного воздушного охлаждения асинхронного двигателя;  – сервопривод для управления пусковым реостатом; – сервопривод для управления пусковым реостатом;  – пусковой реостат; – силовой выключатель. – пусковой реостат; – силовой выключатель. Управляющие сигналы:  – включить силовой выключатель; – включить силовой выключатель;  – выключить силовой выключатель; – выключить силовой выключатель;  – включить/выключить привод масляного насоса; – включить/выключить привод масляного насоса;  – включить УЗЩ; – включить УЗЩ;  – выключить УЗЩ; – выключить УЗЩ;  – включить/выключить привод вентилятора; – включить/выключить привод вентилятора;  – включить/выключить привод пускового реостата (ход вперед); – включить/выключить привод пускового реостата (ход вперед);  – включить/выключить привод пускового реостата (обратный ход). Сигналы обратной связи: – включить/выключить привод пускового реостата (обратный ход). Сигналы обратной связи:  – состояние cилового выключателя (включено/выключено); – состояние cилового выключателя (включено/выключено);  – напряжение сети; – напряжение сети;  – состояние защиты от перегрузки; – состояние защиты от перегрузки;  – состояние защиты от короткого замыкания; – состояние защиты от короткого замыкания;  – режим работы масляного насоса; – режим работы масляного насоса;  – давление масла; – давление масла;  – температура подшипников; – температура подшипников;  – температура обмотки; – температура обмотки;  – режим работы привода вентилятора; – режим работы привода вентилятора;  – воздушный поток; – воздушный поток;  – сопротивление изоляции, – сопротивление изоляции,  – щетки наложены, – щетки наложены,  – щётки подняты, ротор замкнут накоротко; – щётки подняты, ротор замкнут накоротко;  – пусковой реостат в конечном положении ( – пусковой реостат в конечном положении ( ); );  – пусковой реостат в исходном положении. – пусковой реостат в исходном положении.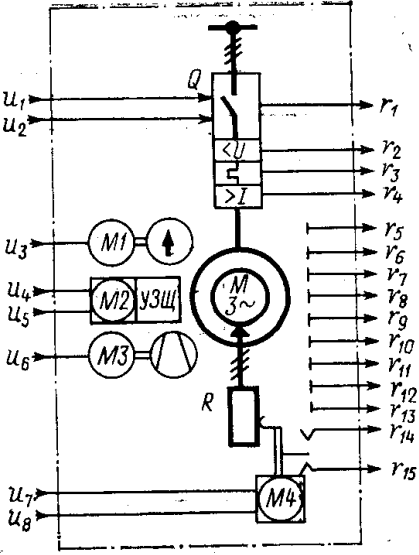 Рисунок 1.1 – Приводной агрегат с высоковольтным двигателем |