Курсовая работы по дисциплине Системы автоматического управления электроприводом. КР, гр. ЭГП-16-1, Патрушев В. А.. Курсовой проект по дисциплине Электротехнические комплексы и системы преобразования электроэнергии
 Скачать 1.92 Mb. Скачать 1.92 Mb.
|

4.1.4 Расчёт задатчика интенсивностиДля ограничения ускорения в переходных режимах и, следовательно, динамических нагрузок используются задатчики интенсивности. Задатчик интенсивности первого порядка преобразует скачкообразный сигнал на входе в линейно изменяющийся во времени с ограничением сигнал на выходе. Для расчета времени пуска привода воспользуюсь основным уравнением динамики для вращательного движения:  где  – вращающий момент двигателя Н – вращающий момент двигателя Н ; ; – момент сопротивления со стороны механизма, Н ; – момент сопротивления со стороны механизма, Н ; – ускорение привода механизма, рад/с2. – ускорение привода механизма, рад/с2.Решение этого уравнения должно удовлетворять следующему условию: вращающий момент двигателя не должен превышать предельное значение (в данном случае значение критического момента двигателя). Если заменить первую производную угловой скорости вращения вала двигателя по времени на соответствующее разностное отношение, что допускает линейная зависимость на выходе задатчика интенсивности, то, приняв момент сопротивления со стороны механизма равным номинальному моменту двигателя, можно найти минимально допустимое время пуска привода:   4.1.5 Система скалярного управления без задатчика интенсивности с отрицательной обратной связью по токуДля создания обратной связи по току введу несколько коэффициентов:    4.2 Анализ переходных процессов в системе скалярного управления методом имитационного моделированияИмитационное моделирование систем скалярного управления проведу при помощи ПО Matlab в среде моделирования Simulink. 4.2.1 Система управления с задатчиком интенсивностиМодель системы скалярного управления с задатчиком интенсивности представлена на рисунке 4.2. 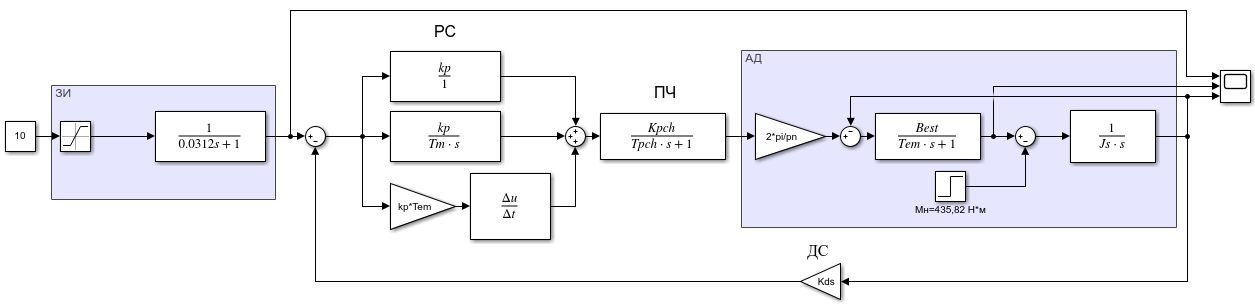 Рисунок 4.2 – Модель системы скалярного регулирования с задатчиком интенсивности Графики переходных процессов приведены на рисунке 4.3. На графиках наблюдается малый колебательный процесс, при установившемся режиме величины момента и скорости вращения ротора совпадают с расчётными. Можно заметить, что напряжение задания скорости изменяется плавно. 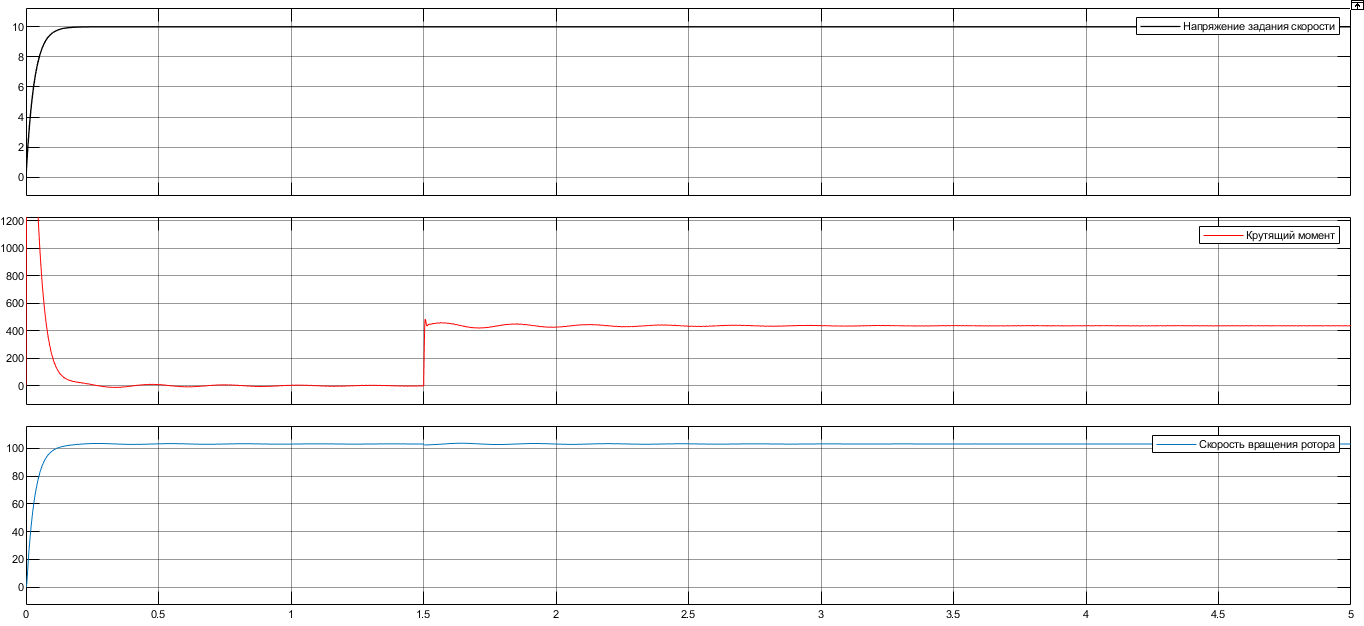 Рисунок 4.3 – Графики переходных процессов (система с ЗИ) 4.2.2 Система скалярного управления без задатчика интенсивности с отрицательной обратной связью по токуМодель системы скалярного управления с отрицательной обратной связью по току приведена на рисунке 4.4. 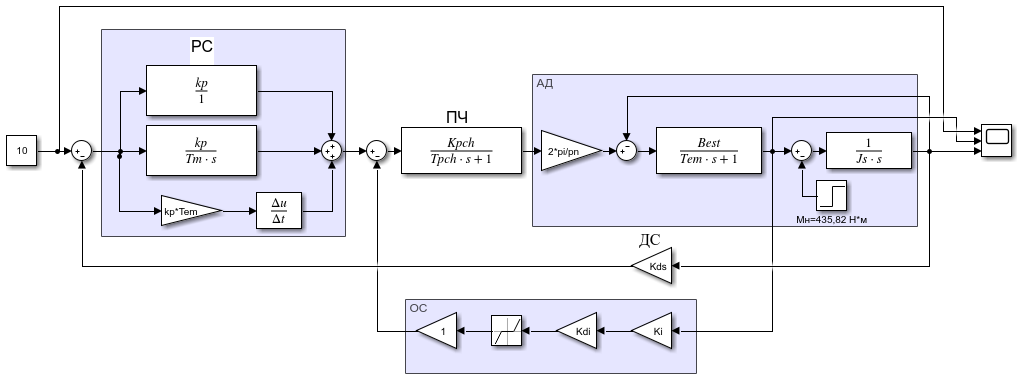 Рисунок 4.4 – Модель системы скалярного управления с ООС по току Графики переходных процессов модели скалярного управления с отрицательной обратной связью по току представлены на рисунке 4.5. На графиках можно наблюдать большую колебательность переходных процессов, при этом напряжение задания изменяется скачком. Значения в установившемся режиме соответствуют расчётным, но длительность переходных процессов увеличилась по сравнению с длительностью переходных процессов модели системы скалярного регулирования с задатчиком интенсивности. 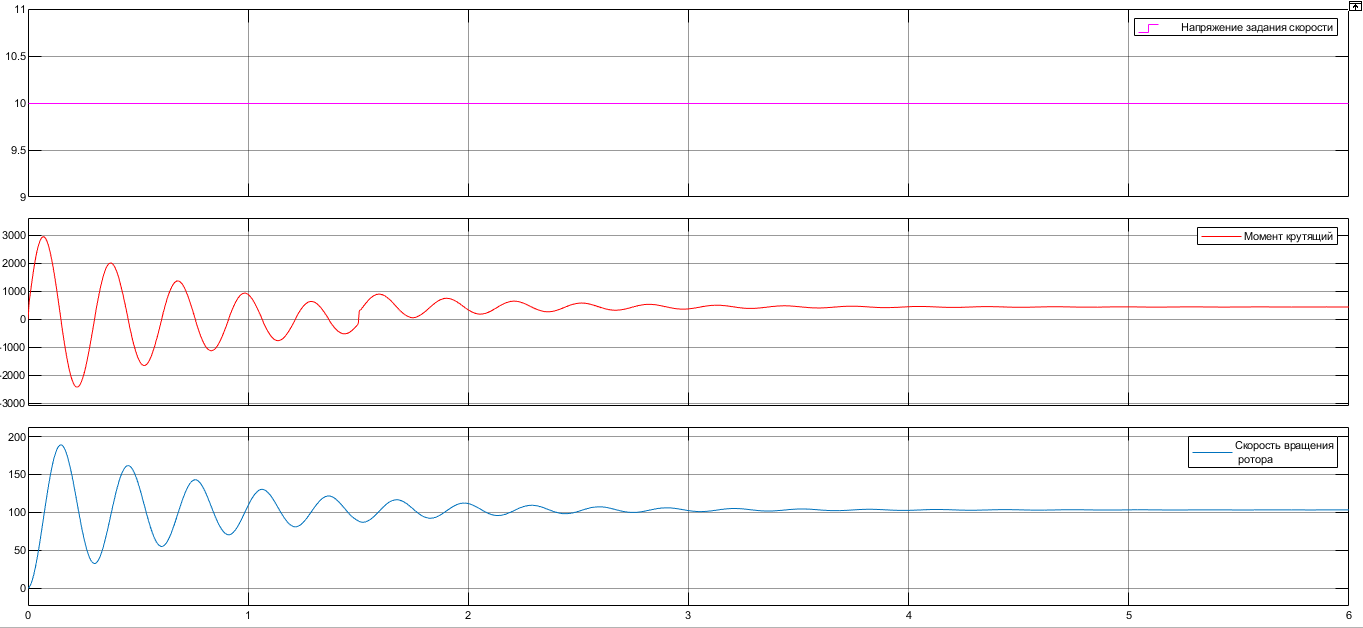 Рисунок 4.5 – Графики переходных процессов (система с ООС) Заключение по разделу При сравнении графиков переходных процессов (рисунки 4.4 и 4.5) можно пронаблюдать следующее: система с задатчиком интенсивности имеет менее колебательный и менее длительный переходный процесс, чем система с отрицательной обратной связью по току. Таким образом, можно сделать вывод, что система с задатчиком интенсивности является более эффективной в плане сглаживания колебаний при переходных процессах. |