Курсовая работы по дисциплине Системы автоматического управления электроприводом. КР, гр. ЭГП-16-1, Патрушев В. А.. Курсовой проект по дисциплине Электротехнические комплексы и системы преобразования электроэнергии
 Скачать 1.92 Mb. Скачать 1.92 Mb.
|

5 Реализация системы управления5.1 Выбор преобразователя частоты для заданного двигателя с векторным управлениемПроцесс проектирования электропривода с преобразователем частоты представляет собой совокупность упорядоченных во времени, взаимосвязанных, объединённых в стадии и этапы работ, выполнение которых необходимо и достаточно для создания электропривода (ЭП) с преобразователем частоты (ПЧ), соответствующего заданным требованиям. По заданным и расчётным параметрам электродвигателя А250S6 (разделы курсовой работы 2 и 3) был подобран преобразователь частоты с наименованием VLT® AutomationDrive FC 302 тип Р37К производства компании Danfoss [3], технические характеристики которого представлены в приложении А. 5.2 Схема соединений электрического комплекса электроприводаСхема основных подключений ПЧ VLT® AutomationDrive FC 302 представлена на рисунке 5.1. 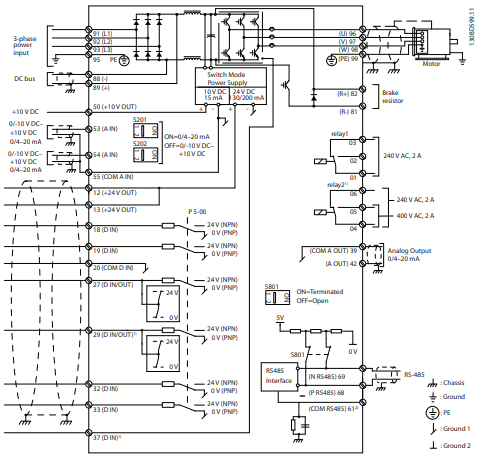 Рисунок 5.1 – Схема подключений ПЧ VLT® Automation Drive FC 302 На рисунке 5.2 изображён базовый пример применения частотного регулирования в системе электропривода. Здесь используется преобразователь частоты, который управляет одним двигателем и защищает его во всех режимах работы агрегата. Так как преобразователь частоты защищает двигатель от коротких замыканий и перегрева, то обязательного для прямого пуска двигателя автоматического выключателя, защищающего двигатель, в схеме нет. В качестве устройства, защищающего преобразователь частоты и другие устройства, подключённые к этой же электрической сети, установлены предохранители FU1…FU3. Ток срабатывания предохранителей выбирается исходя из номинального тока преобразователя частоты. 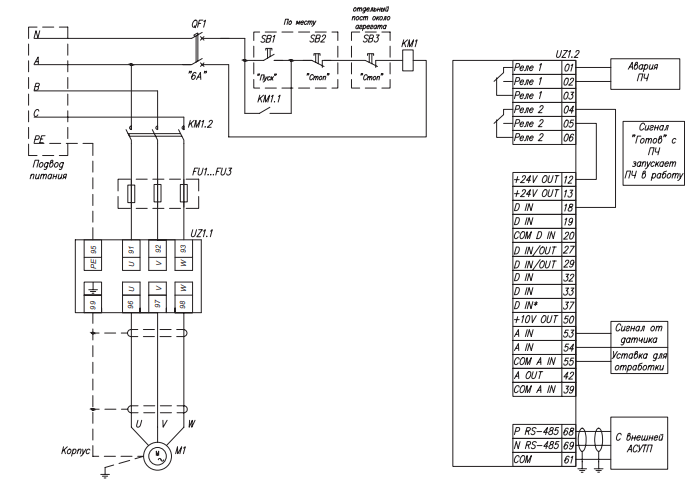 Рисунок 5.2 Типовая схема с применением частотного регулирования при управлении одним двигателем (под ПЧ подразумеваю ПЧ VLT® Automation Drive FC 302) Алгоритм пуска для схемы, показанной на рисунке 5.2, отрабатывается следующим образом: 1. В первый момент времени, автоматический выключатель  замкнут, питание к трём фазам, напряжением 380 В подведено. Контактор замкнут, питание к трём фазам, напряжением 380 В подведено. Контактор  разомкнут. разомкнут. 2. При нажатии кнопки  ( ( ) «Пуск», по цепи, которую можно обозначить ) «Пуск», по цепи, которую можно обозначить  , начинает протекать синусоидальный ток. При прохождении тока через катушку контактора ( , начинает протекать синусоидальный ток. При прохождении тока через катушку контактора ( ), замыкаются силовые контакты этого контактора ), замыкаются силовые контакты этого контактора  ( ( ) – тем самым подводя питающее напряжение на преобразователь частоты. А также замыкается дополнительный замыкающий контакт ) – тем самым подводя питающее напряжение на преобразователь частоты. А также замыкается дополнительный замыкающий контакт  ( ( ) – шунтируя кнопку . Контакт установлен в связи с тем, что обычно в качестве кнопок «Пуск» используются кнопки без фиксации – то есть после единовременного нажатия кнопки, она возвращается в исходное положение (разомкнутое). Таким образом для продолжения работы системы после возвращения кнопки «Пуск» в исходное состояние, требуется осуществить «самоподхват» кнопки с помощью контакта силового контактора. Так же использование такого контакта позволяет осуществить защиту от самовключения контактора после исчезновения напряжения или падения напряжения ниже номинального напряжения контактора. Это мы и видим в схеме пускорегулирования данной системы. ) – шунтируя кнопку . Контакт установлен в связи с тем, что обычно в качестве кнопок «Пуск» используются кнопки без фиксации – то есть после единовременного нажатия кнопки, она возвращается в исходное положение (разомкнутое). Таким образом для продолжения работы системы после возвращения кнопки «Пуск» в исходное состояние, требуется осуществить «самоподхват» кнопки с помощью контакта силового контактора. Так же использование такого контакта позволяет осуществить защиту от самовключения контактора после исчезновения напряжения или падения напряжения ниже номинального напряжения контактора. Это мы и видим в схеме пускорегулирования данной системы. 3. Следует отметить, что при нажатии кнопки  ( ( ) «Стоп» и кнопки «Стоп» ) «Стоп» и кнопки «Стоп»  ( ), цепь , питающая катушку контактора , разорвется. Ток через катушку перестанет протекать и силовые контакты разомкнутся, оставив преобразователь частоты без питания. ( ), цепь , питающая катушку контактора , разорвется. Ток через катушку перестанет протекать и силовые контакты разомкнутся, оставив преобразователь частоты без питания. 4. При подаче на ПЧ силового питания, он не сразу готов управлять двигателем. В ПЧ должны сначала произойти процессы подготовки к запуску (заряд конденсаторов звена постоянного напряжения внутри преобразователя). На схеме, изображённой на рисунке 5.2, видно, что пуск преобразователя произойдет после того, как реле 2 (  ) ПЧ переключится. Переключение этого реле произойдет тогда, когда ПЧ будет готов к началу полноценной работы с двигателем. Сигнал с реле заведён на дискретный вход ПЧ 18 ( ) ПЧ переключится. Переключение этого реле произойдет тогда, когда ПЧ будет готов к началу полноценной работы с двигателем. Сигнал с реле заведён на дискретный вход ПЧ 18 ( ) – таким образом, команда «Пуск ПЧ» задается самим ПЧ при готовности его работы. ) – таким образом, команда «Пуск ПЧ» задается самим ПЧ при готовности его работы. 5. После переключения реле 2 ПЧ, он начинает отрабатывать тот принцип управления двигателем, который в нем настроен. 6. В качестве управления двигателем с помощью преобразователя частоты на рисунке 5.2 показаны два варианта, которые могут использоваться, в том числе и раздельно. • Первый вариант – управление по протоколу Modbus RTU через  (стандартно во всех преобразователях частоты Danfoss). В этом случае используются выводы – 68, 69, 61 ( (стандартно во всех преобразователях частоты Danfoss). В этом случае используются выводы – 68, 69, 61 ( ). ). • Второй вариант – управление по датчику обратной связи. В данной схеме датчик обратной связи подключён к аналоговому входу 53 (  ) преобразователя частоты. Выход датчика может быть как токовый, значения на выходе 0…20 мА, так и выходом по напряжению – 0…10 В. В качестве уставки, которую преобразователь должен отработать, используется внешняя уставка, приходящая также на аналоговый вход ПЧ – 54 ( ). Преобразователь частоты сравнивает значение, полученное с помощью датчика обратной связи со значением уставки. Если значения различаются, то преобразователь так меняет управление двигателем, чтобы разница между обоими значениями стала близка к 0. ) преобразователя частоты. Выход датчика может быть как токовый, значения на выходе 0…20 мА, так и выходом по напряжению – 0…10 В. В качестве уставки, которую преобразователь должен отработать, используется внешняя уставка, приходящая также на аналоговый вход ПЧ – 54 ( ). Преобразователь частоты сравнивает значение, полученное с помощью датчика обратной связи со значением уставки. Если значения различаются, то преобразователь так меняет управление двигателем, чтобы разница между обоими значениями стала близка к 0. 7. При возникновении какой-либо аварии при работе ПЧ (например, перегрев обмоток двигателя, обнаружение короткого замыкания обмоток и т.д.), преобразователь выставит на Реле 1 (  ) сигнал об аварии (реле переключится) и остановит двигатель выбегом. При этом до нажатия кнопок или , силовое питание будет подведено к преобразователю частоты. ) сигнал об аварии (реле переключится) и остановит двигатель выбегом. При этом до нажатия кнопок или , силовое питание будет подведено к преобразователю частоты.В таблице 5.1 представлено общее описание назначение компонентов схемы, представленной на рисунке 5.2. Таблица 5.1 Общее описание назначения компонентов схемы
|


