Курсовая работы по дисциплине Системы автоматического управления электроприводом. КР, гр. ЭГП-16-1, Патрушев В. А.. Курсовой проект по дисциплине Электротехнические комплексы и системы преобразования электроэнергии
 Скачать 1.92 Mb. Скачать 1.92 Mb.
|

4.1.1 Структура системы скалярного управленияСтруктурная схема замкнутой по скорости системы скалярного управления асинхронным двигателем представлена на рисунке 4.1. Объектом управления является асинхронный двигатель с управляемым преобразователем – преобразователем частоты. Статические и динамические свойства электропривода задаются путём настройки регулятора скорости. Датчик скорости выполняет функцию обратной связи. Поскольку в представленной системе отсутствует контур регулирования тока, для ограничения динамических нагрузок на время пуска используется задатчик интенсивности. 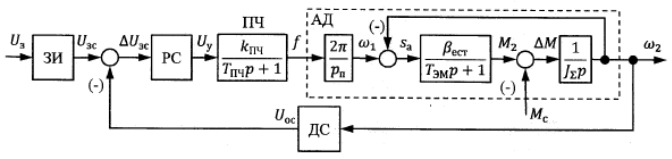 Рисунок 4.1 – структурная схема замкнутой по скорости системы скалярного управления: ЗИ – задатчик интенсивности; РС – регулятор скорости; ПЧ – преобразователь частоты; АД – асинхронный двигатель с короткозамкнутым ротором; ДС – датчик скорости 4.1.2 Расчёт параметров объекта управленияПреобразователь частоты представляет собой инерционное звено первого порядка (апериодическое). Передаточный коэффициент ПЧ можно вычислить как отношение максимальной выходной частоты к максимальному напряжению управления в статике (  ). Тогда можно рассчитать его передаточный коэффициент: ). Тогда можно рассчитать его передаточный коэффициент: Постоянная времени преобразователя частоты складывается из времени запаздывания процесса преобразования и периода несущей частоты (для данного преобразователя):  Асинхронный двигатель представляет собой несколько последовательно соединенных звеньев. Первое звено является пропорциональным и преобразует выходную частоту ПЧ в синхронную угловую скорость вращения (скорость вращения поля статора). То есть передаточный коэффициент обмотки статора:  где  – число пар полюсов электродвигателя. – число пар полюсов электродвигателя.Разницей между угловой скоростью вращения поля статора и ротора является угловая скорость роторной ЭДС или абсолютное значение скольжения. Поэтому  модуль жёсткости естественной статической зависимости вращающего момента двигателя от абсолютного скольжения. Эта зависимость имеет нелинейный характер, т. е. жёсткость есть величина переменная, но на рабочем участке характеристики ее можно принять постоянной (линеаризовать зависимость): модуль жёсткости естественной статической зависимости вращающего момента двигателя от абсолютного скольжения. Эта зависимость имеет нелинейный характер, т. е. жёсткость есть величина переменная, но на рабочем участке характеристики ее можно принять постоянной (линеаризовать зависимость): Электромагнитная постоянная времени равна отношению суммарной индуктивности фазы системы к суммарному активному сопротивлению. Суммарная индуктивность складывается из индуктивностей фильтра, статора и ротора. В свою очередь индуктивности статора и ротора складываются из индуктивностей рассеяния и главной индуктивности фазы асинхронной машины. Таким образом:   Для определения суммарного активного сопротивления необходимо вычислить коэффициент электромагнитной связи ротора:  Тогда суммарное активное сопротивление фазы:   Электромагнитная постоянная времени:  4.1.3 Синтез регулятора скоростиС учетом совершённых вычислений можно записать передаточную функцию асинхронного двигателя. При этом следует учитывать, что в состав структурной схемы АД входит замкнутый контур.  где механическая постоянная времени:  тогда:  Объект регулирования состоит из преобразователя частоты и асинхронного двигателя, то есть:  Передаточный коэффициент обратной связи по скорости определяется из условия равенства напряжения обратной связи максимальному напряжению задания при заданной скорости вращения, которая принимается равной номинальной скорости вращения:  Желаемая передаточная функция разомкнутого контура регулирования скорости имеет вид:  За некомпенсируемую постоянную времени  , принимается наименьшая постоянная времени контура регулирования, в моём случае это постоянная времени преобразователя частоты , принимается наименьшая постоянная времени контура регулирования, в моём случае это постоянная времени преобразователя частоты  Для устранения статической ошибки регулирования в желаемую передаточную функцию разомкнутого контура регулирования вводится интегратор. Соотношение постоянной времени интегрирования и некомпенсируемой постоянной времени определяет безразмерный коэффициент Для устранения статической ошибки регулирования в желаемую передаточную функцию разомкнутого контура регулирования вводится интегратор. Соотношение постоянной времени интегрирования и некомпенсируемой постоянной времени определяет безразмерный коэффициент  . При . При  достигается наилучшее соотношение быстродействия контура и величины перерегулирования (настройка на «модульный оптимум»). Зная передаточную функцию объекта регулирования, нахожу передаточную функцию регулятора скорости: достигается наилучшее соотношение быстродействия контура и величины перерегулирования (настройка на «модульный оптимум»). Зная передаточную функцию объекта регулирования, нахожу передаточную функцию регулятора скорости: Это передаточная функция ПИД-регулятора, где:    тогда:  |