Курсовая работы по дисциплине Системы автоматического управления электроприводом. КР, гр. ЭГП-16-1, Патрушев В. А.. Курсовой проект по дисциплине Электротехнические комплексы и системы преобразования электроэнергии
 Скачать 1.92 Mb. Скачать 1.92 Mb.
|

1.2 Синтез структурной схемы конечного автоматаНа этом этапе я составлю: 1) структурную схему КА системы управления в режиме местного управления по кнопкам (три состояния); 2) структурную схему КА для полного варианта набора сигналов системы управления, включая контакты и таймер контроля продолжительности операции. Буду использовать описания электропривода М4 как конечного автомата (при различном управлении), полученные в разделе 1.1. 1.2.1 Местное управление с кнопочного поста (число состояний три)Кодирование состояний конечного автомата Кодирование состояний конечного автомата представлено в таблице 1.5. Таблица 1.5 – Кодирование состояний КА
Формирование сигналов возбуждения триггерных схем Составленная в соответствии с таблицей истинности  -триггера, которая представлена в таблице 1.6, таблица соответствия сигналов возбуждения триггеров и состояний КА представлена в таблице 1.7 (для реализации структурной схемы КА необходимо использовать два -триггера, для битов номер один и ноль кодов состояний КА). -триггера, которая представлена в таблице 1.6, таблица соответствия сигналов возбуждения триггеров и состояний КА представлена в таблице 1.7 (для реализации структурной схемы КА необходимо использовать два -триггера, для битов номер один и ноль кодов состояний КА).Таблица 1.6 – Таблица истинности -триггера
Таблица 1.7 – Сигналы -триггера
Формирование значений сигналов  в функции состояний в функции состояний    Запись состояний триггеров в виде соответствующих им выражений в левой части функций переходов         Структурная схема конечного автомата Структурная схема конечного автомата, построенная в соответствии с составленными функциями представлена на рисунке 1.6. 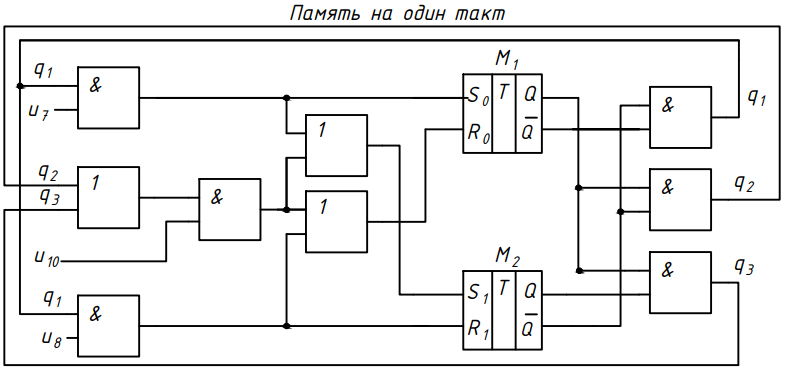 Рисунок 1.6 – Структурная схема КА | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||






 где i – номер сигнала
где i – номер сигнала (бит 1)
(бит 1) (бит 0)
(бит 0)


