Курсовая работы по дисциплине Системы автоматического управления электроприводом. КР, гр. ЭГП-16-1, Патрушев В. А.. Курсовой проект по дисциплине Электротехнические комплексы и системы преобразования электроэнергии
 Скачать 1.92 Mb. Скачать 1.92 Mb.
|

1.3 Разработка и проверка программы для ПЛК ZelioЗадачи: составить программы для двух структурных схем конечного автомата системы управления электроприводом: 1) системы управления в режиме местного управления по кнопкам (три состояния); 2) для полного варианта набора сигналов системы управления, включая контакты и таймер контроля продолжительности операции. Использую описания как конечного автомата электропривода М4, изложенные в разделе 1.1. 1.3.1 Местное управление с поста (число состояний три)Структурная схема и переменные в программе Опираясь на данные подраздела 1.2, составляю таблицы: соответствия состояний, их кодов и сигналов установки/сброса, подаваемых на вход триггеров (таблица 1.10); соответствия входных сигналов и входов триггеров (таблица 1.11). Структурная схема КА приведена в предыдущем подразделе (рисунок 1.6). Таблица 1.10 – Состояния и сигналы триггеров
Таблица 1.11 – Сигналы и входы триггеров
Для работы с программой ZelioSoft2 принимаю следующие обозначения: - для триггера 1:     - для триггера 2 обозначения присваиваются аналогично обозначениям первого триггера; - входные сигналы:    - состояния:    Реализация программы Программа для контроллера, реализованная в программе ZelioSoft2 представлена на рисунке 1.9. При составлении программы используется инверсная логика, то есть в программе:  нормально открытый контакт, нормально открытый контакт,  – нормально закрытый контакт и т. д. – нормально закрытый контакт и т. д.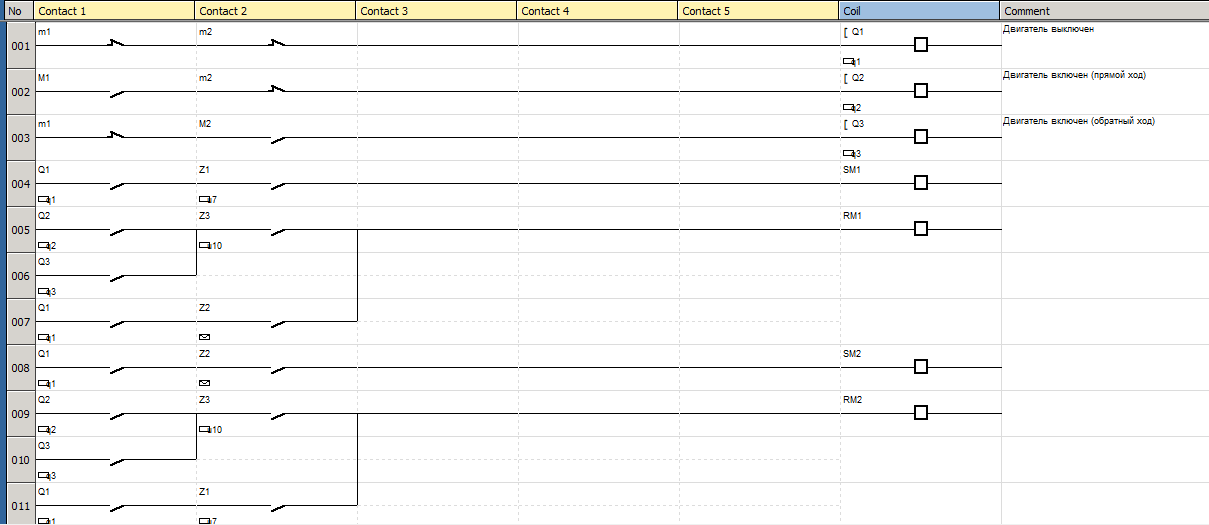 Рисунок 1.9 – Программа для контроллера | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 )
)









