механика полёта. Механика полета. Механика
 Скачать 1.01 Mb. Скачать 1.01 Mb.
|

|
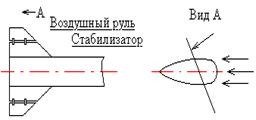
Органы управления Управляющие моменты Органы управления – это агрегаты и устройства, создающие управляющие усилия, которые действуют на ЛА и обеспечивают движение по заданной траектории, а также парирование возмущающих сил и моментов, возникающих во время этого движения. Они действуют в соответствии с сигналами, вырабатываемыми системой управления. В большинстве случаев изменение  требует поворота корпуса ракеты относительно ее вектора скорости на некоторый угол (угол атаки, скольжения или крена). требует поворота корпуса ракеты относительно ее вектора скорости на некоторый угол (угол атаки, скольжения или крена).Для поворота корпуса к нему необходимо приложить соответствующий момент относительно центра масс. Такой момент называют управляющим моментом. Необходимо отметить – управляющие моменты нужны не только для того, чтобы ЛА двигался по заданной траектории, но и для того, чтобы поддерживать угловую ориентацию ЛА в пространстве (т.е. поддерживать угловую стабилизацию). Необходимость такой поддержки связана с тем, что на ЛА непрерывно действуют различные возмущения. Возмущения могут быть вызваны: – несимметрией ЛА; – эксцентриситетом тяги; – воздействием неспокойной атмосферы. Устройства, которые создают управляющие моменты, необходимые для угловой стабилизации ЛА принято называть органами стабилизации. У баллистических ракет функции органов управления и органов стабилизации могут выполняться одними и теми же устройствами. У ракет-носителей эти устройства разделены. Основные типы органов управления баллистических ракет Основные типы органов управления баллистических ракет приведены на следующих рисунках.
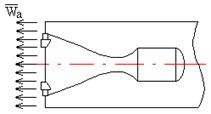
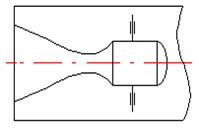
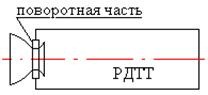
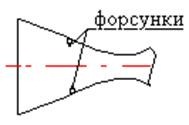
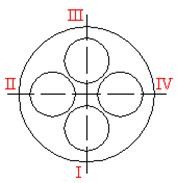
Примечание: Все перечисленные органы управления могут создавать управляющие моменты рысканья и тангажа, однако не все из них пригодны для создания момента крена. Если на ракете имеется один поворотный двигатель или если силы создающие момент рысканья и тангажа направлены вдоль продольной оси ракеты, то в этом случае для создания момента крена необходимо применять специальные управляющие двигатели, тяга которых действует в поперечной плоскости ракеты. Величина сил, создаваемых органами управления, зависит от перемещений этих органов (чаще всего угловых) или от секундного расхода топлива, если для создания управляющей силы используется рассогласование тяг основных двигателей. Р 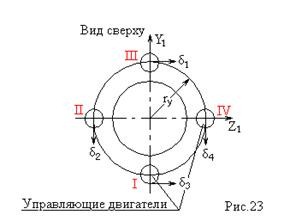 ассмотрим определение сил и управляющих моментов, создаваемыми органами управления на примере ракеты с четырьмя управляющими двигателями. ассмотрим определение сил и управляющих моментов, создаваемыми органами управления на примере ракеты с четырьмя управляющими двигателями.П Рис.27 оложительным отклонения управляющего двигателя будем считать его поворот против часовой стрелки, если смотреть со стороны соответствующей оси. Т.е. на рис.27 положительным отклонением двигателей 2 и 4 будет отклонение вниз, а для двигателей 1 и 3 – отклонение вправо. Будем считать, что тяги всех четырех управляющих двигателей равны по величине.  Запишем проекции тяги Р управляющих двигателей на оси OX1Y1Z1: 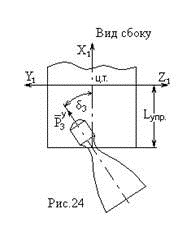    где  – соответственно углы отклонения управляющих двигателей 1, 2, 3, 4. – соответственно углы отклонения управляющих двигателей 1, 2, 3, 4.П Рис.28 роекции моментов относительно тех же осей координат будут равны (рис. 28):     где  – расстояние от носка ракеты до оси вращения управляющего двигателя, – расстояние от носка ракеты до оси вращения управляющего двигателя,  – расстояние от носка ракеты до центра тяжести ракеты. – расстояние от носка ракеты до центра тяжести ракеты.Сила тяги реактивного (ракетного) двигателя Тяга – равнодействующая всех реактивных сил, создаваемых агрегатами двигателя, определяется по формуле:  где  – массовый секундный расход топлива реактивного двигателя; Wa – скорость газовой струи на срезе сопла; Fa – площадь среза сопла; ра – давление на срезе сопла; рh – давление окружающей среды. – массовый секундный расход топлива реактивного двигателя; Wa – скорость газовой струи на срезе сопла; Fa – площадь среза сопла; ра – давление на срезе сопла; рh – давление окружающей среды.Первый член данного уравнения характеризует тягу, создаваемую за счет отбрасывания от сопла газов и эта часть – реактивная сила (статическая составляющая). Второй член характеризует тягу, которая определяется разностью давлений на срезе сопла и давления окружающей среды и эта часть – переменная составляющая реактивной тяги (зависит от высоты полета). Реактивный момент П 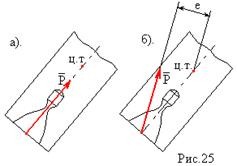 усть есть ракета с однокамерной двигательной установкой (ДУ) рис.29: усть есть ракета с однокамерной двигательной установкой (ДУ) рис.29:а) Если вектор тяги двигателя Р направлена вдоль оси, то реактивный момент отсутствует (рис. 29,а). б Рис.29 ) Если вектор тяги (и результирующий вектор тяги для многокамерной ДУ) действует с некоторым эксцентриситетом относительно центра тяжести (рис. 29,б), то в этом случае действует реактивный момент  . .Аэродинамические схемы ЛА Планером называется конструкция, объединяющая корпус, крылья, органы управления и стабилизации в единую аэродинамическую схему. Он предназначен для создания управляющих сил и размещения всей аппаратуры ракеты. Корпус планера обычно цилиндрической формы, за исключением ракеты типа «несущий конус», с конической (сферической) головной частью. Форма корпуса и головной части выбирается в целях получения наименьшей силы лобового сопротивления ракеты при полете. Материалом для корпуса служат легкие прочные металлы и сплавы Аэродинамические поверхности планера служат для создания подъемной и управляющих сил. Подъемная сила, которая возникает при взаимодействии ракеты с воздухом во время ее полета, обеспечивает удержание ЛА в воздухе. Управляющие силы необходимы для изменения направления полета ракеты. Различают подвижные и неподвижные аэродинамические поверхности (АП). Подвижные АП, предназначенные для управления полетом и стабилизацией ЛА, называются рулями, поворотными крыльями. Свои функции они выполняют путем поворота вокруг осей, перпендикулярных продольной оси корпуса ракеты, либо при выдвижении из корпуса на определенное время и в определенной последовательности. Неподвижные АП служат для стабилизации полета ЛА (стабилизаторы) и для создания подъемной силы (несущие крылья, поверхности). По взаимному расположению рулей и неподвижных аэродинамических поверхностей можно выделить следующие аэродинамические схемы ракет (рис.30): - нормальная или обычная; - «утка»; - «бесхвостка»; - «поворотное крыло»; В нормальной схеме рули и стабилизатор располагаются позади крыльев в хвостовой части ракеты. Схема «бесхвостка». Данная схема является разновидностью нормальной схемы. Здесь крылья выполняют одновременно функции крыльев и стабилизаторов и отличаются большей стреловидностью и малым размахом. С целью увеличения подъемной силы в этой схеме увеличена площадь крыльев. При этом рули оказываются расположенными непосредственно за крыльями и связываются с ними конструктивно.  В аэродинамической схеме «утка» рули находятся в головной части ракеты (впереди центра масс), а крылья, выполняющие и функцию стабилизатора, расположены в хвостовой части корпуса ракеты. Эта схема удобна с точки зрения компоновки ракеты, так как рулевые машинки могут быть расположены близко к рулям. При такой компоновке ракеты подъемная сила рулей совпадает по направлению с подъемной силой крыльев и корпуса. Однако расположение рулей в носовой части ракеты и возникновение скоса воздушного потока при отклонении рулей приводит к потере подъемной силы на крыльях и возникновению значительных моментов крена. Чтобы избежать «момента косой обдувки» крыльевой блок делается вращающимся вокруг оси ракеты, что позволяет избежать воздействия скоса воздушного потока на них. В аэродинамической схеме «утка» рули находятся в головной части ракеты (впереди центра масс), а крылья, выполняющие и функцию стабилизатора, расположены в хвостовой части корпуса ракеты. Эта схема удобна с точки зрения компоновки ракеты, так как рулевые машинки могут быть расположены близко к рулям. При такой компоновке ракеты подъемная сила рулей совпадает по направлению с подъемной силой крыльев и корпуса. Однако расположение рулей в носовой части ракеты и возникновение скоса воздушного потока при отклонении рулей приводит к потере подъемной силы на крыльях и возникновению значительных моментов крена. Чтобы избежать «момента косой обдувки» крыльевой блок делается вращающимся вокруг оси ракеты, что позволяет избежать воздействия скоса воздушного потока на них.В Рис. 30 Аэродинамические схемы: а)Нормальная; б)"Бесхвостка"; в)"Утка"; г)"Поворотное крыло". схеме «поворотное крыло» подвижные поверхности (поворотные крылья) располагаются в районе центра тяжести и наряду с функцией крыла выполняют функцию рулей, а неподвижные стабилизаторы расположены в хвостовой части корпуса. Принципиально не существует наилучшей аэродинамической схемы. Выбор схемы аэродинамической компоновки определяется требуемыми высотами и дальностями полета ракеты, маневренностью и составом бортовой аппаратуры. Таблица Основные достоинства и недостатки аэродинамических схем
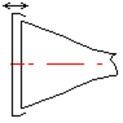
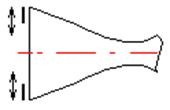
Типовые формы корпусов Фюзеляжи самолетов, беспилотных летательных аппаратов, корпуса снарядов и ракет представляют собой длинные тонкие тела вращения, обычно состоящие из конических (параболических, оживальных – контур тела получается вращением дуги окружности вокруг некоторой оси, пересекающей эту дугу) и цилиндрических отсеков. В отличие от крыла, фюзеляж при малых углах атаки почти не создает подъемной силы. Основной составляющей аэродинамической силы для тел вращения является сила лобового сопротивления. В условиях установившегося полета она определяет тягу двигателей, необходимую для поддержания движения ЛА. Следовательно, формы фюзеляжей и корпусов ЛА должны обеспечивать минимальное, при данных размерах, лобовое сопротивление. С  верхзвуковое тело вращения, исходя из конструктивных и аэродинамических соображений, обычно представляют как совокупность трех частей: головной, цилиндрической и кормовой. Головная и кормовая части играют основную роль в образовании сопротивления давления (волнового и донного), а средняя- цилиндрическая часть создает основную долю сопротивления трения. Корпус ЛА простейшей формы имеет головную часть в виде заостренного (притупленного) конуса или параболоида, среднюю – цилиндрическую часть и кормовую – сужающуюся (расширяющуюся) оконечность конической или параболической формы (рис.31 и 32). В более сложных конструкциях могут присутствовать переходные (сплошные или ферменные) отсеки и цилиндрические отсеки разных диаметров. Кроме того наличие хвостового отсека нецилиндрической формы совсем не обязательно. О  сновными геометрическими характеристиками корпуса ЛА являются следующие параметры: Θк – угол полураствора конуса головной (кормовой) части или угол при вершине параболоида; dм – диаметр миделевого сечения (для конус-цилиндрических тел – диаметр цилиндра); сновными геометрическими характеристиками корпуса ЛА являются следующие параметры: Θк – угол полураствора конуса головной (кормовой) части или угол при вершине параболоида; dм – диаметр миделевого сечения (для конус-цилиндрических тел – диаметр цилиндра);  – удлинение элемента (отсека) тела. – удлинение элемента (отсека) тела.Наиболее распространены головные части и переходные отсеки с прямолинейной образующей в виде конуса. Уравнение такой образующей:  . Головные части могут иметь притупление (рис.31). Для конуса со сферическим (касательным) притуплением уравнение прямолинейной части образующей . Головные части могут иметь притупление (рис.31). Для конуса со сферическим (касательным) притуплением уравнение прямолинейной части образующей где,   – продольная координата и радиус места стыка сферического наконечника радиусом – продольная координата и радиус места стыка сферического наконечника радиусом  с конической поверхностью. с конической поверхностью.Конструктивно-компоновочная схема ракеты Конструктивно-компоновочная схема (ККС) – это чертеж ЛА, содержащий решение принципиальных конструктивных вопросов построения ЛА, учитывающий требования тактико-технического задания (ТТЗ) к комплексу и ЛА как основному элементу комплекса. На ККС, как правило, отражается решение следующих проектных вопросов: выбор внешних обводов; выбор взаимного расположения отсеков и агрегатов (внутренняя компоновка); выбор количества блоков (для ракет-носителей) и способа их соединений - Внешняя компоновка Внешняя компоновка (аэродинамическая компоновка) – процедура выбора внешних обводов (формы) ЛА, определяющих силы аэродинамического сопротивления и непосредственно влияющие на устойчивость и управляемость ЛА. Внутренняя компоновка Внутренняя компоновка – процедура размещения элементов ЛА (полезного груза, топливных баков, двигателей, системы управления, систем жизнеобеспечения и др.) в объёмах, замыкаемых внешними обводами. Конструктивно-компоновочная схема ракеты – совокупность особенностей конструктивного исполнения и взаимного расположения ступеней, агрегатов, отсеков и систем ракеты. ККС ракеты характеризуется рядом свойств и параметров, к числу которых относятся: количество ступеней и способ их соединения и разделения в полете; тип головной части и способ ее отделения; конструктивные схемы двигателей, отдельных отсеков корпуса ракеты, головного обтекателя; формы зарядов твердого топлива (для ракеты с РДТТ); тип органов управления ракеты; схема старта. Выбор основных схемно-конструктивных решений применительно к конкретной ракете проводится с учетом новейших достижений науки и техники в соответствующих областях ракетостроения; технических возможностей производственной базы; располагаемых сроков и средств, отпущенных на разработку. ККС ракеты в совокупности с соответствующими параметрами ракетных топлив и материалов конструкции формирует так называемый технический облик ракеты, определяющий ее боевые возможности, эксплуатационные свойства и технологию производства Так, например, конструктивно-компоновочная схема первой советской межконтинентальной баллистической ракеты Р-7 (прототипа РН «Союз») – двухступенчатая «пакетная» (с продольным делением ступеней, рис. 33). Основными аргументами в пользу именно такой схемы являлись: запуск всех двигателей в «идеальных» условиях на стартовой позиции, относительная простота проектной оптимизации размеров ступеней, в т.ч. с учетом транспортировки их железнодорожным транспортом. Такая схема путем добавления новых верхних ступеней дает возможность создания целой гаммы ракет-носителей, предназначенных для решения существенно разных задач. 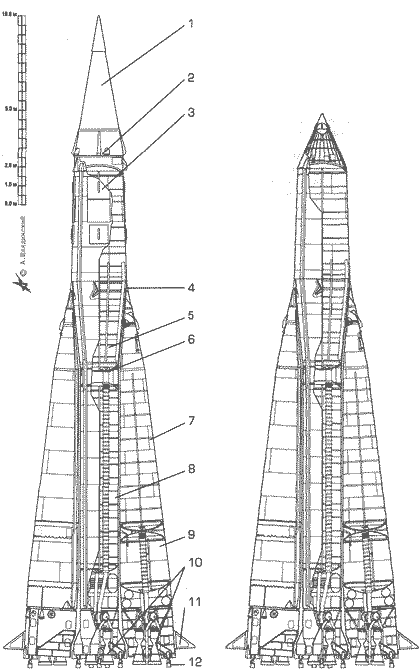 Рис. 33 Слева: конструктивно-компоновочная схема первой советской межконтинентальной баллистической ракеты Р-7: 1 – носовой конус с боевой частью; 2, 6 – приборные отсеки; 3 – антенны телеметрической системы; 4 – башмаки силового пояса; 5, 7 – баки окислителя; 8, 9 – баки горючего; 10 – многокамерные маршевые двигатели центрального и боковых блоков; 11 – аэродинамические рули; 12 – рулевые камеры сгорания |