методические указания. методичские указания МОДЕЛИРОВАНИЕ В МАТКАДЕ 1. Методические указания для проведения лабораторных работ по дисциплине Моделирование систем и процессов
 Скачать 1.02 Mb. Скачать 1.02 Mb.
|

|
Проводим проверку значимости коэффициентов по Стьюденту: Для этого: вычисляем выборочную и дисперсию и с.к.о. 8 3 Y MY 2  D D i 1 j 1 i j i  D 0.75 D 0.75S 0.866 8238 Вычисляем обратную функцию распределения Стьюдента для уровня значимости 0,95 и числа степеней свободы =16 Если в прямой функции распределения, задавшись значе- нием случайной величины и числом степеней свободы, мы вычисляем вероятность, то в об- ратной функции, задавшись вероятностью и числом степеней свободы, мы получаем значе- ние случайной величины. Для Стьюдента, как известно, число степеней свободы равно удвоенному числу экспе- риментов. qt(0.95 16) 1.746 Вычисляем доверительную ошибку ε и сравниваем ее с модулями значений коэф- фициентов. qt(0.95 16) 1.746 qt(0.95 16)S 1.512  aT ( 81.875 0.625 aT ( 81.875 0.6254.375 13.125 9.375 1.875 4.375 1.875) Мы видим, что второй коэффициент меньше доверительной ошибки, следовательно, он не значим. Записываем уравнение регрессии без учета второго коэффициента: Q1 a a X a X a X a X a X a X i 1 3 i 2 4 i 3 5 i 4 6 i 5 7 i 6 8 i 7 Проверка адекватности по Фишеру Вычисляем функцию F.  8 Q MY 8 Q MY2 SAD SAD i i F  12 1 D SAD 4.105 10 i 1 F 5.473 12 10 Вычисляем обратную функцию распределения Фишера: qF(0.95 16 1) 246.464 Так как Вычисленное F < qF, то с вероятностью 0,95 полученное уравнение адек- ватно экспериментальным данным. ЛАБОРАТОРНАЯ РАБОТА №18. АДАПТИВНЫЙ ФИЛЬТР КАЛМАНА Основной проблемой, возникающей при любых измерениях, является их недоста- точная точность. Имеется два пути решения этой проблемы: повышение точности изме- рительных приборов и повышение точности путем статистической обработки избыточно- го числа измерений, в результате которой получают оценку измеряемой величины. Повы- шение точности измерительных приборов требует существенных затрат, в то время как статистическая обработка измерений при наличии компьютера стоит дешево и проводит- ся достаточно быстро. Сегодня существует множество методов статистической обработки измерений. Их можно разделить на два больших класса: просто статистической обработки и опти- мальной обработки, в результате которой получают в каком- то смысле оптимальную оценку измеряемой величины. Кроме того, обычно разделяют методы статистической обработки для статических и динамических систем. Статистическая обработка статиче- ских систем изучалась на 4-м курсе. Это метод наименьших квадратов. Мы ниже рас- смотрим несколько методов оптимальной статистической обработки информации дина- мических систем на конкретных примерах. Сложность обработки информации в динамической системе заключается в том, что ее состояние ме- няется во времени и отдельные измерения переводить из одного состояния в другое. Существует также несколько методов оптимальной статистической обработки для динамических систем. Это фильтры Винера, Винера- Хопфа и др. В 1961 году американский математик КАЛМАН разработал оптимальный фильтр для линейных нестационарных систем. Преимуществом фильтра Калмана является то, что он решает задачу во временной , а не частотной области, как , например, фильтр Винера. Калман разработал свой фильтр для многомерных задач Формулировка задачи , как правило, задается в матричной форме, однако мы рассмотрим ниже простейшие скалярные задачи. в матричной форме Фильтр Калмана существует в непрерывной и в дискретных формах. Разберем дис- кретный фильтр Калмана. Рассмотрим следующую задачу Блок- схема исследуемого процесса имеет вид:   f(t) f(t) y(t) x(t) Рис.1. Блок – схема объекта. . Здесь Ф – линейный объект( т.е. объект описываемый линейными соотношениями), на выходе которого вырабатывается неслучайный сигнал y(t). На выходную величину воз- действует аддитивный (в виде слагаемого ) шум w(t). Шум w(t) – это какие –то случайности внутри нашей системы. После шума мы имеем выходную величину x(t). X(t) – выходной сигнал нашей системы есть сумма неслучайного процесса y(t) и шума. Поэтому это уже случайный процесс. Поэтому в целом наша система – вероятностная ( стохастическая). Мы хотим определить неизвестный нам случайный выходной процесс y(t) измерить неслучайную выходную величину y(t), но измеряем мы не ее, и не случайный выходной сигнал системы x(t), а преобразованный линейным блоком Н случайный процесс z(t). Это так называемые косвенные измерения, когда меряется какая – то функция определяемой величины. В общем случае Ф и Н могут изменяться во времени. Шумы W(t) и v(t) – нормально распределенные случайные процессы с нулевыми математическими ожиданиями, M(w)=0 M( v) =0 и с постоянными дисперсиями Q и R, соответственно. Процесс x(t) также распределен нормально , т.к. любое линейное преобразование нор- мально распределенного процесса есть нормально распределенный случайный процесс, а шум w(t) подчиняется нормальному закону распределения. Измерения производятся с ошибкой v (t) . Таким образом, в действительности мы измеряем величину z(t)=H(x(t)+W(t))+v(t) , (1) причем случайный процесс z ( t) также распределен нормально. оценку Требуется построить фильтр, после которого мы получим наилучшую yˆ величины y. Каждое последующее состояние системы определяется предыдущим: xk+1 =xke –∆t T . Нижеприведенная программа составлена для Q=R=0.1. Для оценки качества фильтра- ции в программе решается также уравнение незашумленного, якобы «неизвестного» нам процесса. Программа решения данной задачи в Маткаде приведена на рис.2 Здесь: y-«незашумленная» переменная, X1- оцениваемая переменная: y 0 Q 0.1 R 0.1 Q R x1 Qz Rx1 Q R T 5 Q y Z- измеряемая переменная. В доцикловой части первым опе- ратором присваивается начальное зна- чение «незашумленной» и оценивае- мой переменной, причем начальное значение оцениваемой переменной бе- рется «с потолка», вводятся постоян- ные значения дисперсий обоих шумов и постоянной времени системы, про- изводится первое измерение z и вы- числяется первая оценка мат. ожида- for k 1 100 1 1 ния и дисперсии. Измерение рассматривается как x1 1 exp T 2 x1exp T сумма двух псевдослучайных величин, каждая из которых образуется с по- P P P P Q R мощью двух функций: Функция r n d (x) возвращает y 1 exp 1 yexp 1 равномерно распределенное случайное x1 (Pz Rx1) P R Q y T R 0 число в диапазоне 0 –x. Функция d n o r m ( x,y,w) воз- вращает нормально распределенное псевдослучайное число для аргумента x, с математическим ожиданием y и P P Z z k R P R с.к.о z. В первой функции dnorm за мат. ожидание принято значение y – «не- зашумленной» переменной, во второй Y k X1 y x1 – мат. ожидание равно 0. В цикловой части программы k k Z производится перевод оцениваемых переменной и дисперсии в новое со- стояние системы, затем переводится в новое состояние «незашумленная» пе Рис.2. Программа фильтрации фильтром Калмана Yj Z j 2.5 2.22 1.94 1.67 1.39 1.11 0.83 j 0 100 ременная , производится новое измерение z и вы- числяется новая оценка оцениваемой переменной и дисперсии. В последних операторах цикловой части производится накапливание измерений, оцениваемой и 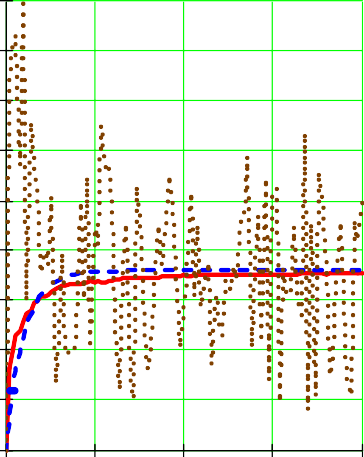 «незашумленной» переменной в массивы, с це- лью вывода их на печать после окончания решения «незашумленной» переменной в массивы, с це- лью вывода их на печать после окончания решенияНа рис.3. приведены решение задачи. Кривая, изо- браженная штрихом – «незашумленная» переменная, непрерывная кривая – оценка, точечная кривая – изме- рения без фильтрации. 0.56 0.28 0 25 50 75 100 j Рис.3. Графики кривых око ЛАБОРАТОРНАЯ РАБОТА № 19. ПОДБОР ПИД РЕГУЛЯТОРА Система автоматического управления задана своей структурной схемой (рис.1) и данными, приведенными в таблицах. Необходимо: Задавшись данными из таблиц 1,2, стабилизировать движение системы     + + + +σ ло выбранной траектории, подобрав коэффициенты ПИД - регулятора. Данные для выбора ПИД – регулятора: Здесь звенья 1 - 4 описывают объект управления, а звено 5 - регулятор. По исходным данным отдельных звеньев, сведенным в таблицу, следует составить уравнение системы и провести подготовку ее имитационного моделирования на ЭВМ в па- кете МАТКАД. Само моделирование будет проведено на лабораторных занятиях. Цель моделирования - подбор закона управления в звене 5, подбор ПИД- регулятора. 1.Звено 1 - линейное динамическое и описывается дифференциальным уравнением 2-го порядка: T12 dy1 2/ dt2 +1T1dy1/dt +y1 = k1 Звено 2 - линейное статическое, зависимость выхода от входа y 2 (y1) задана табли- цей. Для ввода в ЭВМ необходимо найти аналитическую функциональную зависимость y2(y1) , проведя аппроксимацию.у2=а2у1 Звено - также статическое, зависимость выхода от входа y 3 (y 1) также задана табли- цей. Однако, из-за неточных измерений аппроксимацию следует проводить линейной регрес- сией, вычислив коэффициенты уравнения y 3= a3 y 1 . Сигналы y 2 и y3 складываются в сигнал =y2 +y3. 5 .Звено 4 - линейное динамическое и описывается передаточной функцией T2dy/ dt +y = k 2 . 6.Структура закона управления задана y5 = 1 y + 2 dy /dt + 3 y dt Составим уравнение всей системы. Для этого: Выпишем все уравнения T2 y``Ty` y k 1 1 1 1 1 1 y2 a2 y1 y3 a3 y1 y2 y3 T2 y` y k2 t m1 y m2 y`m3 ydt 0 Так как мы будем решать задачу при нулевом входном сигнале, то ∆= -y5, что позволя- ет объединить уравнения 1 и 6: t 1 1 1 1 1 1 1 2 3 T2 y``Ty` y k(my my`m ydt 0 Объединим уравнения 2-4. Получим (a2 a3 ) y1 Запишем уравнения 1 и 5 в операторной форме. T2 p2 Tp1) y k(m mp m1 ) y 1 1 1 1 1 2 3 p (T2 p1) y k2 (a2 a3 ) y1 Чтобы освободиться от интеграла продифференцируем первое уравнение (T2 p3 Tp2 p) y k(mp mp2 m) y 1 1 1 1 1 2 3 Разрешим второе уравнение относительно у1: y (T2 p1) y 1 k(a a) ли: 2 2 3 Подставим теперь это выражение в уравнение, которое мы продифференцирова- (T2 p3 Tp2 p) 2 1 1 (T2 p1) y k1(m1 p m2 pk2 (a2 a3 ) m3 ) y Освободимся от знаменателя и сделаем приведение подобных: (T2 p3 Tp2 p)(Tp1) y kk(mp mp2 m)(a a) y 1 1 2 1 2 1 2 3 2 3 [(T2 p3 Tp2 p)(Tp1) kk(mp mp2 m)(a a)]y 0 1 1 2 1 2 1 2 3 2 3 {T2Tp4 (TT T2) ) p3 [T T kkm(a a)] p2 [1 kkm(a a)] p kkm(a a)}y 0 1 2 1 2 1 2 1 1 2 2 2 3 1 2 1 2 3 1 2 3 2 3 Перейдем во временную область 2 d4 y 2) d3 y d2 y dy T1 T2 dt4 (T1T2 T1 ) dt3 [T2 T1 k1k2m2 (a2 a3 )] dt2 [1 k1k2m1 (a2 a3 )] dt k1k2m3 (a2 a3 ) y 0 Мы получили однородное дифференциальное уравнение четвертого порядка, ко- торое и будем моделировать Решение задачи в Маткаде. Пусть по таблице 1 выбрано k 1= 2 , k 2=1,5, T1 = 5, T2= 4, 1= 0,4 , а из таблицы
2 - По данным таблицы составим векторы vx2,vy2,vx3,vy3.Используя встроенную функцию line определим коэффициенты a2,b2,a3,b3. (см.рис.1) vy2 28 17 yvx2 2 0 1 a2 slope(vx2 vy2) a2 11 0 1 14 a3 slope(vx3 vy3) a3 16.7 |