Задание на курсовую работу. Методические указания для выполнения лабораторных работ по курсу Автоматизация технологических процессов и производств
 Скачать 5.97 Mb. Скачать 5.97 Mb.
|

|
Описание лабораторного стенда Исследование принципа действия системы автоматизированного управления разветвленными конвейерными линиями осуществляется на лабораторном стенде. На мнемосхеме лабораторного стенда расположены светодиоды, имитирующие процесс работы магистральных и участковых конвейеров линии, процесс загрузки и разгрузки сквозных бункеров, а также индикацию аварийного состояния каждого из конвейеров в линии (рисунок 2). Также на мнемощите расположены тумблеры, которые имитируют срабатывание конвейерных датчиков заштыбовки (ДЗШ), контроля схода ленты (КСЛ), датчика скорости (ДС), кабель-троссового выключателя (КТВ); есть тумблеры, которые имитируют уровень транспортируемого материала в двух бункерах. Управление стендом осуществляется с помощью микроконтроллера Атmega 8535 фирмы Atmel. Для опроса состояния тумблеров используются два мультиплексора КМ155КП. Эти микросхемы представляют собой селектор-мультиплексор на 8 каналов. В микроконтроллере выводы порта С предназначены для обработки сигналов, которые поступают с обоих мультиплексоров, а также для управления процессом опроса тумблеров мультиплексорами. С помощью выводов порта D (3 – 7), всех выводов порта В и седьмого вывода порта А осуществляется статическая индикация светодиодов. Группы светодиодов создают динамическую индикацию, которая управляется выводами с нулевого по пятый порта А и первыми тремя выводами порта D. Питание стенда осуществляется от стабилизированного источника питания 5В. 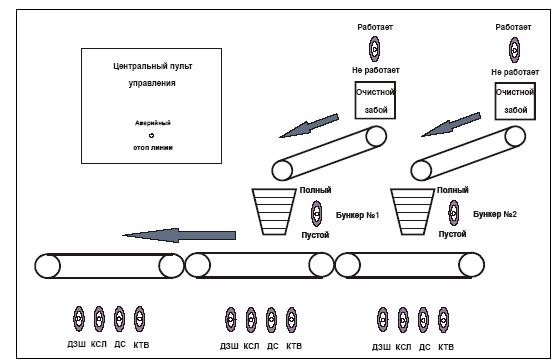 Рисунок 2 – Мнемосхема лабораторного стенда Порядок выполнения и задание к выполнению лабораторной работы 1. Привести схему лабораторного стенда в исходное состояние: все тумблеры установить в положение «выключено» (нижнее положение тумблера). 2. Подать питание на стенд: подключить блок питания в разъем БП и включить его в сеть 220В. При этом, те элементы системы, которые находятся в неактивном состоянии индицируются красным цветом светодиодов, а зеленый цвет индикатора конвейера сигнализирует об исправности стенда. 3. Технологическая ситуация 1. Работает очистной забой №1, бункер №1 не заполнен углем (пуст), очистной забой №2 не работает. 3.1 Включить тумблер, имитирующий работу участка №1. Система управления включает конвейер №1, затем конвейер №2 магистральной конвейерной линии, открывает питатель бункера и включает участковый конвейер (работа конвейеров имитируется зеленым цветом индикатора). Уголь из очистного забоя транспортируется по участковой и магистральной конвейерной линии, сквозь бункер. 3.2 Включить тумблер, имитирующий срабатывание одного из датчиков на магистральном конвейере №1. Система управления произведет аварийное отключение этого конвейера, отключение конвейера №2 магистральной конвейерной линии для избегания завала конвейера №1 и закрытие питателя бункера №1 (останов конвейеров имитируется красным цветом индикаторов). Очистной забой работает до момента заполнения бункера. Когда бункер заполнится, система управления остановит участковый конвейер и комбайн в очистном забое (останов конвейера и комбайна имитируется красным цветом индикатора). Перевести тумблеры работы очистного забоя и датчика в исходное положение (вниз). 3.3 Выполнить действия, аналогичные п. 3.1. Включить тумблер, имитирующий срабатывание одного из датчиков на магистральном конвейере №2. Система управления произведет аварийное отключение этого конвейера и закрытие питателя бункера. Отключение магистрального конвейера №1 произойдет после выдержки времени, позволяющей произвести скачивание оставшегося угля (останов конвейеров имитируется красным цветом индикаторов). Очистной забой работает до момента заполнения бункера. Когда бункер заполнится, система управления остановит участковый конвейер и комбайн в очистном забое (останов конвейера и комбайна имитируется красным цветом индикатора). Перевести тумблеры работы очистного забоя и датчиков в исходное положение (вниз). 4. Технологическая ситуация 2. Работает очистной забой №1, бункер №1 заполнен углем (полный), очистной забой №2 не работает. 4.1 Включить тумблер, имитирующий полное заполнение бункера №1. Включить тумблер, имитирующий работу участка №1. Система управления включает конвейер №1, затем конвейер №2 магистральной конвейерной линии, открывает питатель бункера, включает участковый конвейер и очистной комбайн в забое (запуск имитируется зеленым цветом индикаторов). 4.2 Включить тумблер, имитирующий срабатывание одного из датчиков на магистральном конвейере №1. Система управления произведет аварийный останов участка с отключением всех конвейеров и очистного комбайна (останов имитируется красным цветом индикаторов). Перевести тумблеры работы очистного забоя и датчика в исходное положение (вниз). 4.3 Выполнить действия, аналогичные п. 3.1. Включить тумблер, имитирующий срабатывание одного из датчиков на магистральном конвейере №2. Система управления произведет аварийный останов магистрального конвейера №2, закроет питатель бункера, остановит участковый конвейер и очистной комбайн в забое. Останов магистрального конвейера №1 произойдет после выдержки времени, позволяющей произвести скачивание оставшегося угля. Перевести тумблеры работы очистного забоя и датчика в исходное положение (вниз). 5. Технологическая ситуация 3. Работает очистной забой №2, бункер №2 не заполнен углем (пуст), очистной забой №1 не работает. 5.1 Включить тумблер, имитирующий работу участка №2. Система управления включает участковый конвейер и комбайн в очистном забое. Транспортирование угля производится в бункер. Одновременно происходит запуск магистральной конвейерной линии в порядке очередности. После запуска конвейера №3, магистральной конвейерной линии, питатель бункера №2 открывается и уголь транспортируется сквозь бункер (работа очистного забоя №2 имитируется зеленым цветом индикаторов). 5.2 Имитация срабатывания защит (ДЗШ, КСЛ, КТВ, ДС) выполняется аналогично приведенным выше действиям. 6. Технологическая ситуация 4. Работает очистной забой №2, бункер №2 заполнен углем (полный), очистной забой №1 не работает. 6.1 Включить тумблер, имитирующий полное заполнение бункера №2. Система управления запускает магистральную конвейерную линию (запуск магистральной конвейерной линии имитируется зеленым цветом индикаторов). Затем открывает питатель бункера, включает участковый конвейер и очистной комбайн в забое (запуск имитируется зеленым цветом индикаторов). 6.2 Имитация срабатывания защит (ДЗШ, КСЛ, КТВ, ДС) выполняется аналогично приведенным выше действиям. 7. Технологическая ситуация 5. Одновременная работа двух участков. 7.1 Выполнить действия аналогичные п. 3.1. 7.2 Осуществить дозапуск очистного забоя №2 аналогично п. 4.1 7.3 Выполнить анализ одновременной работы двух участков по световой индикации. 8. Подготовить и оформить отчёт о лабораторной работе. Содержание отчета В отчете необходимо привести назначение, функции и состав системы САУКЛ. Результаты исследования принципа действия системы автоматизированного управления конвейерными линиями на базе микроконтроллеров на лабораторном стенде в технологической ситуации работы конвейерной линии указанной преподавателем. Выводы. Контрольные вопросы Назначение и область применения системы САУКЛ. Функции системы САУКЛ по управлению конвейерной линией. Функции системы САУКЛ по контролю и защите работы конвейерной линии. Состав системы САУКЛ. Перечислите датчики, которые используются для работы системы САУКЛ. Как выполняется линия связи в системе САУКЛ. Как выполняется обмен информацией между пультом управления ПУ и блоком БУК. Чем обеспечивается искробезопасность цепей системы САУКЛ. Принцип действия системы САУКЛ. Рекомендуемая литература 1. Автоматизация технологических процессов подземных горных работ : учеб. /А. В. Бубликов, М. В. Козарь, С. М. Проценко [и др.] ; под общ. ред. В. В. Ткачева. – Днепропетровск : Нац. горн. ун-т, 2012. – 304 с. Лабораторная работа № 6 Тема: Исследование комплекса устройств типа НЭРПА Цель работы - изучение состава, конструкции и исследование принципа действия комплекса устройств типа НЭРПА. Краткие сведения об аппаратуре НЭРПА Назначение Комплекс устройств НЭРПА предназначен для управления стрелочным переводом из кабины машиниста движущегося электровоза. Область применения Комплекс устройств НЭРПА применяется в автоматизированных системах управления подземным электровозным транспортом и при диспетчерском управлении на шахтах, опасных по газу или угольной пыли. При этом комплекс должен обеспечить: - безопасность и безаварийность движения электровозов; - повышение производительности электровозной откатки – интенсивности движения, пропускной способности маршрутов и провозной способности поездов. Функции Комплекс устройств НЭРПА обеспечивает: - автоматическое считывание информации о номере рудничного электровоза и направлении его движения; - выдачу сигналов управления стрелочными переводами, схемами СЦБ, вентиляционными дверьми и аппаратурой безопасности с движущегося электровоза. Состав На рисунке 1 приведена структурная схема комплекса устройств НЭРПА – 1, одной из модификаций комплекса устройств НЭРПА, который смонтирован в лаборатории. Комплекс устройств НЭРПА-1 состоит из передатчика сигналов ЛПС – 1, приёмника сигналов управления НПУ – 1, привода стрелочного моторного ПМС – 1, пускателя приводов ППВ – 2 или ПРА и указателя сигнального светового ССУ – 2. Передатчик сигналов локомотивный ЛПС – 1 предназначен для формирования и передачи амплитудно-модулированных сигналов высокой частоты с движущегося локомотива, содержащих код номера локомотива и команды управления для схем автоматики рудничного рельсового транспорта. Передатчик ЛПС-1 состоит из генератора сигналов локомотивного ЛГС-1, кнопки управления генератором КУ и передающей рамочной антенны А-1. Генератор ЛГС – 1, работающий совместно с антенной А1 представляет собой передатчик амплитудно-модулированных колебаний.  Рисунок 1 – Структурная схема комплекса устройств НЭРПА-1 Приёмник сигналов управления НПУ предназначен для приёма амплитудно-модулированных колебаний высокой частоты, их обработки и выдачи команд управления в схемы автоматизации рудничного рельсового транспорта шахты. Приёмник сигналов управления НПУ (НПУ – 1 или НПУ – 2, НПУ - 3) состоит из аппарата приёма сигналов управления АПСУ (АПСУ – 1 или АПСУ – 2, АПСУ – 3, в зависимости от установленного в аппарате избирателя частоты) и приёмной антенны А – 1. Приёмник НПУ – 1 используется для управления стрелочными переводами из кабины движущегося локомотива, а приёмники НПУ – 2 и НПУ – 3 используются в схемах СЦБ, схемах управления вентиляционными дверями и аппаратуры безопасности. Приёмники НПУ – 1, НПУ – 2 и НПУ – 3 аналогичны и отличаются значением модулирующих частот в аппаратах приёма сигналов управления (АПСУ – 1 – 705 Гц, АПСУ – 2 – 795 Гц, АПСУ – 3 – 1660 Гц). Для монтажно-наладочных работ предусмотрена возможность поставки в качестве принадлежности, по отдельному заказу, генератора частотного переносного ГЧП – 1. Он предназначен для проверки работоспособности приёмников НПУ – 1 и НПИ – 1. Генератор создан на базе основных узлов передатчика ЛПС – 1, содержит задающий генератор несущей частоты и 8 модулирующих генераторов. С помощью переключателя имеется возможность поочерёдно выдавать сигнал от любого из модулирующих генераторов в любой последовательности. Питание генератора осуществляется от аккумуляторной батареи типа 7Д-01 напряжением равным 9В. Принцип действия Для передачи и приёма информации используется радиочастотный способ. Генератор ЛГС – 1 содержит задающий генератор, генерирующий колебания частотой 110 кГц, и восемь модулирующих генераторов фиксированных частот (705, 795. 900, 1020, 1150, 1300, 1470, 1660 Гц). Высокочастотный сигнал, промоделированный частотой шестого генератора, предназначен для управления стрелочными переводами или вентиляционными дверями. Первые пять частот генераторов используются для реализации в различных комбинациях 25 кодовых номеров электровозов. Принятые антенной А1 модулированные по амплитуде колебания высокой частоты после обработки поступают на фильтр. Если частота колебаний соответствует частоте фильтра, то сигнал через выходной детектор поступает на выходное реле, управляющее пускателем моторного привода стрелки. Перевод стрелки с движущегося электровоза, при следовании состава против направления, производится следующим образом: машинист электровоза, установив по показанию сигнального огня указателя ССУ – 2 необходимость перевода стрелки для следования по требуемому маршруту, при въезде в зону размещения приёмной антенны А1 аппарата АПСУ – 1 должен включить кнопку поста управления генератором ЛГС – 1, обеспечивающую выдачу сигнала, модулированного частотой 705 Гц, и удерживать кнопку в таком положении до проследования зоны связи с приёмной антенной. При выходе передающей антенны А1, расположенной на электровозе, из зоны связи с приёмной антенной срабатывает реле аппарата АПСУ – 1 и включает пускатель ППВ – 2 или ПРА моторного привода стрелки ПМС – 4, который производит переключение остряков стрелочного перевода. Описание лабораторного стенда На лабораторном стенде смонтирован промышленной комплекс устройств НЭРПА – 1. Структурная схема лабораторного стенда приведена на рисунке 2, где обозначено: 1 – аппарат АПСУ - 1; 2 – генератор ЛГС – 1; 3 – указатель сигнальный световой ССУ – 2; 4 – модель электровоза 10 АРП; 5 – тумблер включения питания ЛГС – 1; 6 – кнопка управления генератором G7 и G8; 7 – тумблер включения лабораторного стенда НЭРПА – 1; 8 – модель рельсового разъезда (Л – левая ветвь, П – правая ветвь); 9 – антенна рамочная приёмная АРпр; 10 – антенна рамочная передающая АРп (от ЛГС - 1); 11 – антенна рамочная передающая АРп (от ГЧП - 1); 12 – генератор частотный переносной – ГЧП – 1; 13 – аппарат задания маршрута АЗМ – 2 комплекта частотного управления стрелками типа ЧУС - 3. 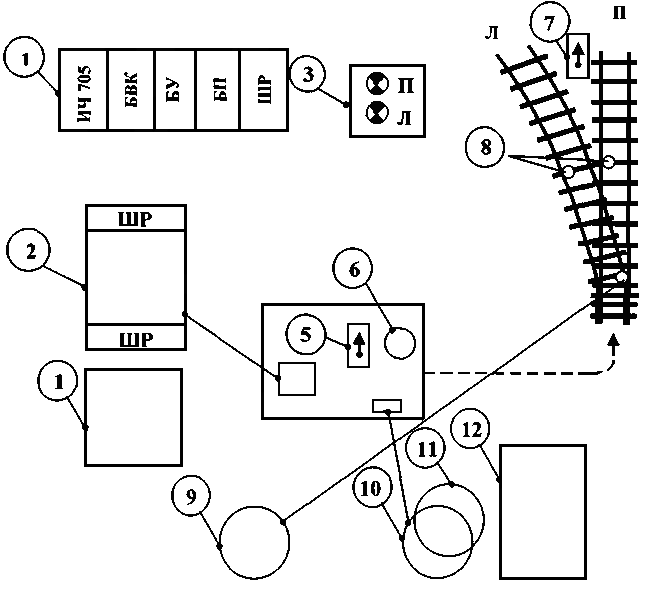 Рисунок 2 – Структурная схема лабораторного стенда комплекса НЭРПА-1 Порядок выполнения и задание к выполнению лабораторной работы Изучить назначение, область применения, функции и состав комплекса устройств НЭРПА – 1. Ознакомиться с конструкцией составных элементов аппаратуры на лабораторном стенде. 3. Подготовить лабораторный стенд к работе. Подать напряжение питания на лабораторный стенд путём включения тумблера 7 и подать напряжение питания на ЛГС-1 путём включения тумблера 5. Проанализировать состояние объекта и световую сигнализацию. 4. Режим “ Перевод стрелки машинистом с движущегося электровоза”. Имитируя приближение электровоза (поз.4) к стрелке, нажать на кнопку включения генератора (поз.6) для перевода стрелки из положения “П” в положение “Л” (поз.8), при этом включается генератор G7 в ЛГС (поз.2) и выдаёт промоделированный высокочастотный сигнал в передающую антенну А1 (поз.10). Имитировать проезд электровоза, т.е. нахождение передающей антенны А1 (поз.10) над приёмной антенной А1 (поз.9) на некотором удалении их друг относительно друга. С выхода А1 (поз.9) сигнал поступает в АПСУ (поз.1), который включает приёмное реле пускателя ПРВ – 2 или ПРА и соответственно привод моторный стрелочный ПМС – 4. Осуществляется перевод стрелки из положения “П” в положение “Л” (имитация). Проанализировать данную ситуацию, показания на ССУ – 2 (поз.2) и световой индикации на линии “Л”. Привести схему в исходное состояние, отключив тумблер (поз.7) электропитания лабораторного стенда, затем вновь включить его. 5. Режим “Перевод стрелки службой обслуживания и ремонта при помощи ГЧП - 1” (ремонтный, проверочный). Для обеспечения монтажных, наладочных, ремонтных и профилактических проверок используют генератор ГЧП – 1 (поз.12). Включить генератор в работу и установить заданную частоту (705, 795 или 1660 Гц) переключателями находящимися на нём (его рамочная антенна А1 (поз.11) выполняет функцию передающей антенны). Приблизить рамочную антенну А1 (поз.11) к антенне А1 (поз.9) приёмной, и зафиксировать состояние объекта управления, проанализировать ситуацию. Выключить лабораторный стенд, отключив тумблеры (поз.5) и (поз.7). 6. Подготовить и оформить отчет о лабораторной работе. Содержание отчёта В отчете необходимо привести назначение, функции, состав и структурную схему комплекса устройств НЭРПА-1. Результаты исследования принципа действия комплекса НЭРПА-1 на лабораторном стенде в режиме управления, указанным преподавателем. Выводы. Контрольные вопросы 1. Область применения комплекса устройств НЭРПА. 2. Функции комплекса устройств НЭРПА. 3. Состав комплекса устройств НЭРПА. 4. Назначение передатчика сигналов локомотивного ЛПС – 1. 5. Назначение приёмника сигналов информации НПИ – 1. 6. Назначение приёмника сигналов управления НПУ. 7. Принцип действия комплекса устройств НЭРПА-1. 8. Какой способ передачи и приёма информации используется в аппаратуре НЭРПА. Рекомендуемая литература 1. Автоматизация производства на угольных шахтах / Г. И. Бедняк, В. А. Ульшин, В.П. Довженко [и др.]. - Киев : Техника, 1989. - 272 с. . Методические указания для выполнения лабораторных работ по курсу «Автоматизация технологических процессов и производств», часть 2 «Автоматизация транспортных установок» (для студентов очной и заочной форм обучения по направлению подготовки 15.03.04 «Автоматизация технологических процессов и производств») / сост: А. С. Оголобченко, В. К. Саулин. - Донецк: ДОННТУ, 2016. - 64 с. Составители: Оголобченко Александр Семенович, к.т.н., доцент кафедры «Горная электротехника и автоматика им. Р.М. Лейбова», Саулин Василий Константинович, старший преподаватель кафедры «Горная электротехника и автоматика им. Р.М. Лейбова». |