Козловой кран ККС. Пдп. 064218. Эса041ЗУ(т). 000. Пз техническое описание козлового крана ккс10
 Скачать 453.03 Kb. Скачать 453.03 Kb.
|

|
Изм. Лист № докум. Подпись Дата Лист ПДП.064218.ЭСА-04-1ЗУ(т).000.ПЗ 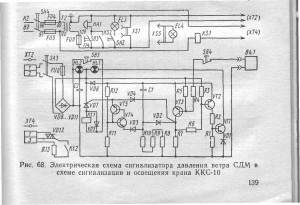 Рисунок 7. Схема сигнализации и освещения крана ККС-10. 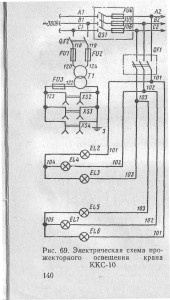 Рисунок 8. Электрическая схема прожекторного освещения крана 1.15. Электрозащита ККС-10 Защитная панель крана ККС-10 расположена в передвижной кабине, поэтому и коммутация несколько отличается от принятой на других кранах. В схеме токовой защиты (рис. 55) принята наиболее экономичная последовательная прокладка цепей, так как эти цепи выполнены гибкими кабелями, соединяющими кабину с грузовой тележкой и мостом.  Изм. Лист № докум. Подпись Дата Лист ПДП.064218.ЭСА-04-1ЗУ(т).000.ПЗ Рисунок 9. Электрическая схема цепей управления крана ККС-10 Одна из трех самостоятельных цепей управления соединяй, контакты нулевых позиций контроллеров всех трех механизмов крана: подъема, передвижения тележки и передвижения моста. Эта цепь служит в основном для проверки коммутации и блокировки цепей моста при независимой работе приводов подъема груза или передвижения тележки. Вторая цепь А1—КМ1.4—154—156—150—8А1—13—6—В1 позволяет выполнять маневры моста крана при неисправной токовой защите и снятом напряжении с контактора защитной панели. Эту операцию выполняют нажатием кнопки 8В1 и переводом рукоятки контроллера ЗА 16 в одну из позиций хода. В третью, главную цепь управления включены все аппараты защиты: предохранители Р1/7 и РУ8, конечные выключатели ЗОЮ — подъема, ЗОИ — передвижения тележки, 8012 — передвижения крана, 80.7 — двери кабины, 808 и 309 — защиты шахты. В этой цепи имеются также выключатели (механические расцепители) аппаратных шкафов 8Р1 и 8Р2, кнопки пуска ЗВ1 и аварийного выключателя 8В2. При нажатии кнопки «пуск» (8В1) под напряжением оказывается катушка КМ1.1, так как все размыкающие контакты аварийного выключателя 8В2 и конечных выключателей замкнуты, а рукоятки контроллеров SA14 и SA15 находятся в нулевом положении, соответствующем замкнутому состоянию их контакта 1. Кнопку можно отпустить, потому что цепь заблокирована блок контактом КМ 1.3, а блок-контакт КМ 1.4 подготовил главную цепь управления грузовой тележкой. Для выключения главного контактора КМ.1 в нулевом положении рукояток контроллеров 8А14, ЗА 15 и 5А16 служит кнопка 8ВЗ. Изм. Лист № докум. Подпись Дата Лист ПДП.064218.ЭСА-04-1ЗУ(т).000.ПЗ Передвижение моста крана осуществляют переводом рукоятки контроллера в первое положение «вперед» или «назад». Катушка магнитного пускателя моста КМ2.1 при этом оказывается под напряжением и замыкает силовую цепь тормозов и рельсовых захватов. При разжатии рычагов захватов срабатывают их конечные выключатели SQ5 и 80.6, замыкая цепь управления передвижением моста. В эту цепь включены катушки контакторов направления КМ3.1 и КМ4.1, электропривода грузовой тележки КАП, К А12. Токовые реле КА16, К А17 установлены в защитной панели, а привода передвижений в аппаратном шкафу на мосту крана. 1.16. КИНЕМАТИЧЕСКИЕ СХЕМЫ КРАНА ККС-10 Изм. Лист № докум. Подпись Дата Лист ПДП.064218.ЭСА-04-1ЗУ(т).000.ПЗ 1.16.1.Назначенние и виды кинематических схем Кинематические схемы механизмов подъёма груза и передвижения грузовых тележек крана ККС-10 приведены на (рис.10). Двигатель посредством муфты и промежуточного вала соединён с редуктором, а его выходной вал через специальную зубчатую муфту связан с грузовым барабаном. Колодочный тормоз установлен на первом быстроходном валу. Механизм подъёма груза оснащён кабельным барабаном, который вращается синхронно с грузовым. Кабель обеспечивает питание электрического привода сменных захватных приспособлений, навешиваемых на крюк крана. Полиспаст грузовой тележки двукратный, у него две грузовые ветви, одновременно наматываемые на две встречные нарезки грузового барабана. Такая подвеска крюка имеет большие преимущества, так как при той же грузоподъёмности механизма можно использовать канат меньшей толщины. Подвеска крюка на четырёх канатах создаёт большой реактивный момент и предохраняет полиспаст от закручивания при повороте груза. Центр тяжести поднимаемого груза всё время находится на фиксированной оси, проходящей через центр симметрии грузового барабана. У крана ККС-10 механизм подъёма груза не имеет кабельного барабана для электропривода захватных устройств. На свободном конце оси грузового барабана закреплена пара шестерен, передающих вращение на барабан выключателя ВУ-150. Соединение отрегулировано с таким расчётом, чтобы контакты выключателя разрывались при достижении крюком максимально допустимой высоты подъёма. Грузовая тележка имеет трёхкратный полиспас с двумя рабочими ветвями.  Изм. Изм.Лист № докум. Подпись Дата Лист ПДП.064218.ЭСА-04-1ЗУ(т).000.ПЗ Рисунок 10. Кинематические схемы механизмов грузовой тележки : а – подъём груза; б – передвижение тележки. Кинематические схемы приводных опорных тележек кранов имеют принципиальное конструктивное сходство. На (рис.10) даны кинематические схемы приводных опорных тележек крана ККС-10. Из схем видны отличительные особенности конструкции тележек, они дают представление о характеристиках зубчатых колес, применяемых в передаточном механизме, и о взаимном расположении основных агрегатов. Оригинально устроен механизм передвижения козлового крана КД-05, который используется также для монтажа крана. На промежуточном валу тележки имеется скользящая на шпонке кулачковая муфта, посредством которой изменяется назначение механизма. При соединении муфты с кулачками ступицы катка механизм работает на передвижении крана, при соединении с кулачковой ступицей канатного барабана выполняет самоподъем крана. Для запасовки каната самомонтажа на опорных тележках крана уста новлены блоки трехкратного полиспаста. Опорная тележка крана ККС-10 имеет одноцелевое назначение . Монтаж этих кранов осуществляется посредством вспомогательных лебедок. Изм. Лист № докум. Подпись Дата Лист ПДП.064218.ЭСА-04-1ЗУ(т).000.ПЗ ПДП.064218.ЭСА-04-1ЗУ(т).000.ПЗ Рисунок 11. Кинематическая схема опорной приводной тележки крана 2.ТЕХНИЧЕСКОЕ ОПИСАНИЕ ПРЕОБРАЗОВАТЕЛЯ ALTIVAR 71 В настоящее время самым распространённым двигателем промышленных электроприводов является трёхфазный асинхронный двигатель с короткозамкнутым ротором. Он является в настоящее время самым простым, надёжным и дешёвым электроприводом в широком диапазоне частоты вращения и мощности. Применение частотно-регулируемого асинхронного электропривода в механизмах подъёмно-транспортного оборудования является эффективным методом повышения технологичности производства. Использование таких приводов позволяет: 1. Значительно, до 40% снизить энергопотребление крана, что особенно актуально при растущих тарифах на энергоносители. 2. Осуществить разгон и торможение двигателя плавно, по линейному закону от времени, при варьировании времени разгона и времени торможения от долей секунд до 50 минут. 3. Повысить комфортные показатели при движении крана и долговечность механического оборудования благодаря плавностиИзм. Лист № докум. Подпись Дата Лист ПДП.064218.ЭСА-04-1ЗУ(т).000.ПЗ переходных процессов. 4. Защитить двигатель от перегрузок по току, перегрева, утечек на землю и от обрывов в цепи питания двигателя. 5. Снизить эксплуатационные расходы на капитальный ремонт оборудования за счёт значительного снижения динамических нагрузок в элементах кинематической цепи. 6. Изменять скорости и ускорения движения механизмов крана применительно к конкретным технологическим задачам. Эффективность и экономичность таких приводов в значительной степени зависит от правильности выбора номинальных параметров их основных элементов, т. е, двигателя и преобразователя частоты. Преобразователь ALTIVAR 71, применяемый для модернизации в данном крановом приводе, обладает всеми необходимыми функциями для управления крановыми приводами. Контроль состояния тормоза, позиционирование с помощью концевых выключателей, выравнивание нагрузки, управление тормозом, адаптированное для механизмов перемещения, управление моментом, измерение нагрузки – это далеко не полный перечень возможностей данного преобразователя. В настоящее время в предложении компании по приводной технике ключевое место занимает преобразователь частоты Altivar 71, который оснащен всеми необходимыми функциями по управлению подъемно-Изм. Лист № докум. Подпись Дата Лист ПДП.064218.ЭСА-04-1ЗУ(т).000.ПЗ транспортными механизмами. Большинство современных крановых электроприводов выполнено на основе асинхронных двигателей с фазным ротором, которые управляются силовыми контроллерами или низковольтными комплектными устройствами. Основным достоинством таких электроприводов является простота их использования, низкая стоимость и ремонтопригодность. Однако эти электроприводы не лишены и весьма существенных недостатков. Вот некоторые из них: • Невозможность получения посадочной скорости в электроприводах механизмов подъема с силовыми контроллерами; • Отсутствие режима силового спуска пустого крюка и легких грузов в электроприводах механизмов подъема с низковольтными комплектными устройствами; • Отсутствие электрического торможения в электроприводах механизмов передвижения; • Низкая износостойкость релейно-контакторной аппаратуры; • Большие потери энергии при пуске и торможении электроприводов в интенсивном режиме работы. Резюмируя вышесказанное, можно предположить, что многие крановые электроприводы не отвечают современным требованиям. Зачастую промышленные предприятия, где установлены краны, изменяют технологию производства и номенклатуру выпускаемой продукции, делают перепланировку производственных и складских помещений. В результате этого мостовой кран, изначально предназначенный для обслуживания склада металла, может, например, использоваться для точных монтажных операций, а краны, управляемые из кабины, переводятся на управление с пола и пр. Модернизация крановых электроприводов зачастую обусловлена необходимостью выполнения требований, предъявляемых к современным кранам. В настоящее время наиболее оптимальным вариантом при модернизации и создании новых электроприводов является использование частотно-регулируемого асинхронного электропривода. Применение преобразователей частоты (ПЧ) серии Altivar 71 благодаря встроенным прикладным функциям позволяет легко интегрировать их в электропривод подъемно-транспортных машин. Преобразователи частоты серии Altivar 71 обеспечивают полностью бесконтактное управление двигателями и плавное высококачественное регулирование частоты вращения во всем диапазоне. Плавность регулирования приводит к существенному уменьшению нагрузки на механическую часть крана, что, в свою очередь, снижает аварийность и увеличивает срок службы крана. Скорость электропривода может быть адаптирована к каждому конкретному технологическому процессу, что позволяет повысить производительность крана. Кроме того применение преобразователей частоты Altivar 71 позволяет получить по некоторым оценкам до 30% экономии электроэнергии. Изм. Лист № докум. Подпись Дата Лист ПДП.064218.ЭСА-04-1ЗУ(т).000.ПЗ Векторное управление асинхронным электродвигателем в преобразователях серии Altivar 71 может осуществляться без датчика скорости по вектору тока и вектору напряжения. Последний способ может использоваться при питании параллельно включенных двигателей от одного преобразователя. Также допускается использование векторного управления с обратной связью по скорости, и скалярного управления. Кроме того, такая модификация ATV71, как ATV71…383, обладая всеми возможностями базовой модели, может также управлять синхронными двигателями с синусоидальной электродвижущей силой в замкнутом приводе, которые все шире применяются вместо асинхронных двигателей для таких подъемных механизмов, как лифты. Изм. Лист № докум. Подпись Дата Лист ПДП.064218.ЭСА-04-1ЗУ(т).000.ПЗ Преобразователь серии Altivar 71 обеспечивает простое и быстрое программирование при помощи макроконфигураций, соответствующих различным видам применения. При этом любая из конфигураций остается полностью модифицируемой. Для удобства программирования, контроля и диагностики преобразователь поставляется со съемным графическим терминалом (8 строк по 24 символа). Диапазон регулирования скорости может достигать 100:1 при векторном управлении без применения датчика скорости. Это особенно важно при модернизации, когда используется уже установленный двигатель, не имеющий встроенного датчика скорости. В преобразователе частоты Altivar 71 реализованы такие прикладных функций для крановых механизмов как: • Подъем грузов с повышенной скоростью; • Выбор слабины грузового каната; • Управление тормозом адаптированное для приводов вертикального и горизонтального перемещений; • Контроль состояния тормоза; • Функция мультидвигатель / мультиконфигурация для применения одного ПЧ в многодвигательных крановых приводах; • Контроль превышения заданной скорости, вращения в обратном направлении, перегрузки. Изм. Лист № докум. Подпись Дата Лист ПДП.064218.ЭСА-04-1ЗУ(т).000.ПЗ Прикладная функция подъем с повышенной скоростью позволяет оптимизировать циклограмму работы крана. В этом случае максимальная скорость подъема и опускания определяется автоматически в зависимости от массы груза. При этом легкие грузы и пустой крюк перемещаются с большей скоростью, чем грузы, близкие к номинальному. |