РЛС_Литер Нави. Руководство предназначено пользователям мультифункционального навигационного тренажера литер navy версия 7
 Скачать 43.61 Mb. Скачать 43.61 Mb.
|

|
3. Измерение направления (пеленга) от собственного судна на любой объект. 3.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7. 3.2 Подвести курсор трекбола на кнопку 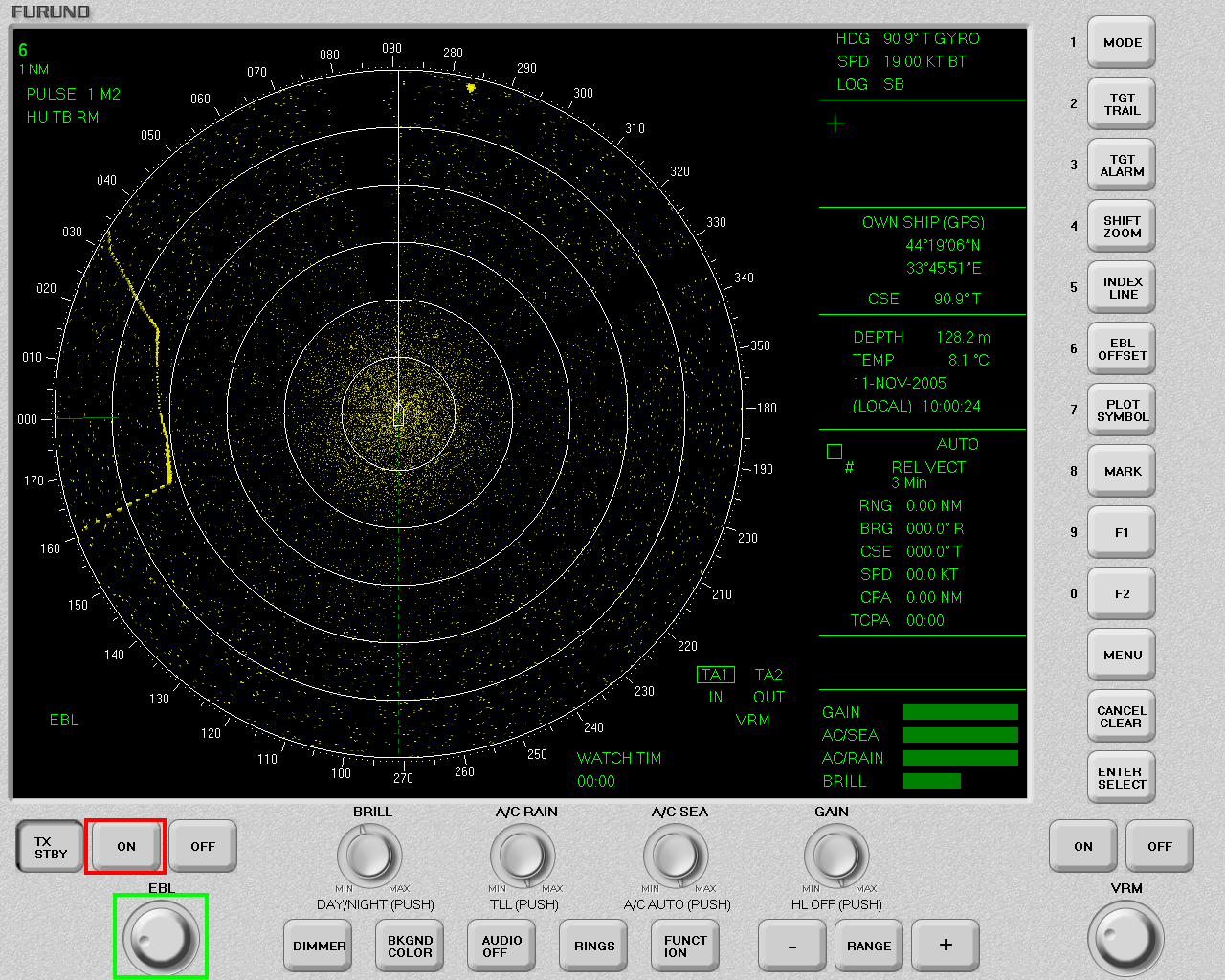 рис.2.4.84 3.3 На ИКО появится подвижные линии измерения пеленга (визири) они отображаются в виде синих пунктирных линий исходящих из центра ИКО до края ИКО, рис.2.4.85, первый визирь обозначен цифрой «1», второй визирь — цифрой «2». Для измерения пеленга визирем номер «1» надо подвести курсор трекбола на ручку “EBL”, рис.2.4.84, обведена зеленным прямоугольником, нажать ЛКТ и удерживая ЛКТ нажатой вращать за часовой стрелкой, линия визиря номер «1» будет передвигаться по направлению часовой стрелки, таким образом линию можно подвести к любому месту внутри ИКО и направления от собственного судна к тому месту которое пересекает линию (пеленг) будет отображаться в месте отображения информации “ EBL ”, рис.2.4.85, обведено красным прямоугольником, верхняя строка обведена зеленым прямоугольником обозначающим, что в данное время активно визирь номер «1», рис.2.4.86. Пеленг измеряется в градусах. 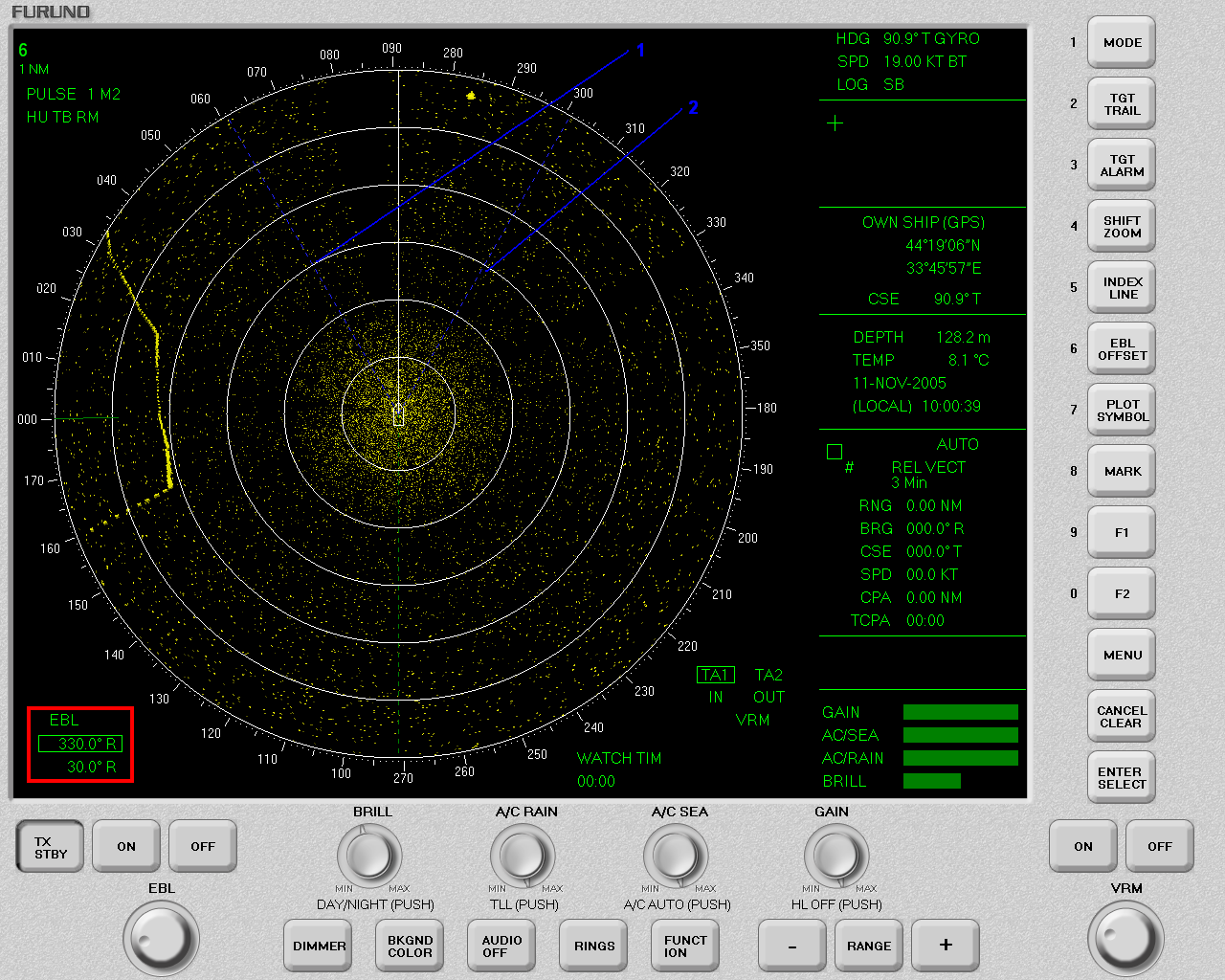 рис.2.4.85  рис.2.4.86 3.4 Для измерения направления (пеленга) от собственного судна на объект визирем «2», надо навести курсор трекбола на кнопку  рис.2.4.87
– по диаметральной плоскости судна, азимутальной шкалы двигается в соответствии с курсом судна, стабилизировано изображение относительно грунта; – ориентация изображения по курсу судна, стабилизация изображения относительно грунта; – ориентация изображения стабилизированная по северу, режим стабилизации относительно грунта; – ориентация изображения стабилизированная по северу, режим стабилизации относительно воды; – по диаметральной плоскости судна, нулевая отметка азимутальной шкалы расположена вверху, стабилизировано изображение относительно грунта; В окне ПО РЛС/САПР должна быть информация о выбранном режиме ориентации изображения. 4.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7. 4.2 По умолчанию при начале работы ПО РЛС/САРП тип Furuno (FR 1500) изображение на ИКО ориентированно по диаметральной плоскости судна, азимутальной шкалы двигается в соответствии с курсом судна, стабилизировано изображение относительно грунта, рис.2.4.88. Отметка севера (зеленного цвета прямая линия) показывает направления севера, рис.2.4.89. При стабилизации относительно грунта центральная точка ИКО, центр первого неподвижного кольца дальности (место собственного судна), на рис.2.4.88, обозначен знаком судна , остается неподвижным относительно отображенного на ИКО эхосигнала. Информация о выбранном режиме ориентации отображается в верхней левой части монитора, рис.2.4.88, обведено красным прямоугольником место отображение информации о выбранном режиме ориентации, информация “HU TB RM”, рис.2.4.90, соответствует режиму ориентации диаметральной плоскости судна, азимутальной шкалы двигается в соответствии с курсом судна, стабилизировано изображение относительно грунта, о чем говорит сокращение “RM”, рис.2.4.90. 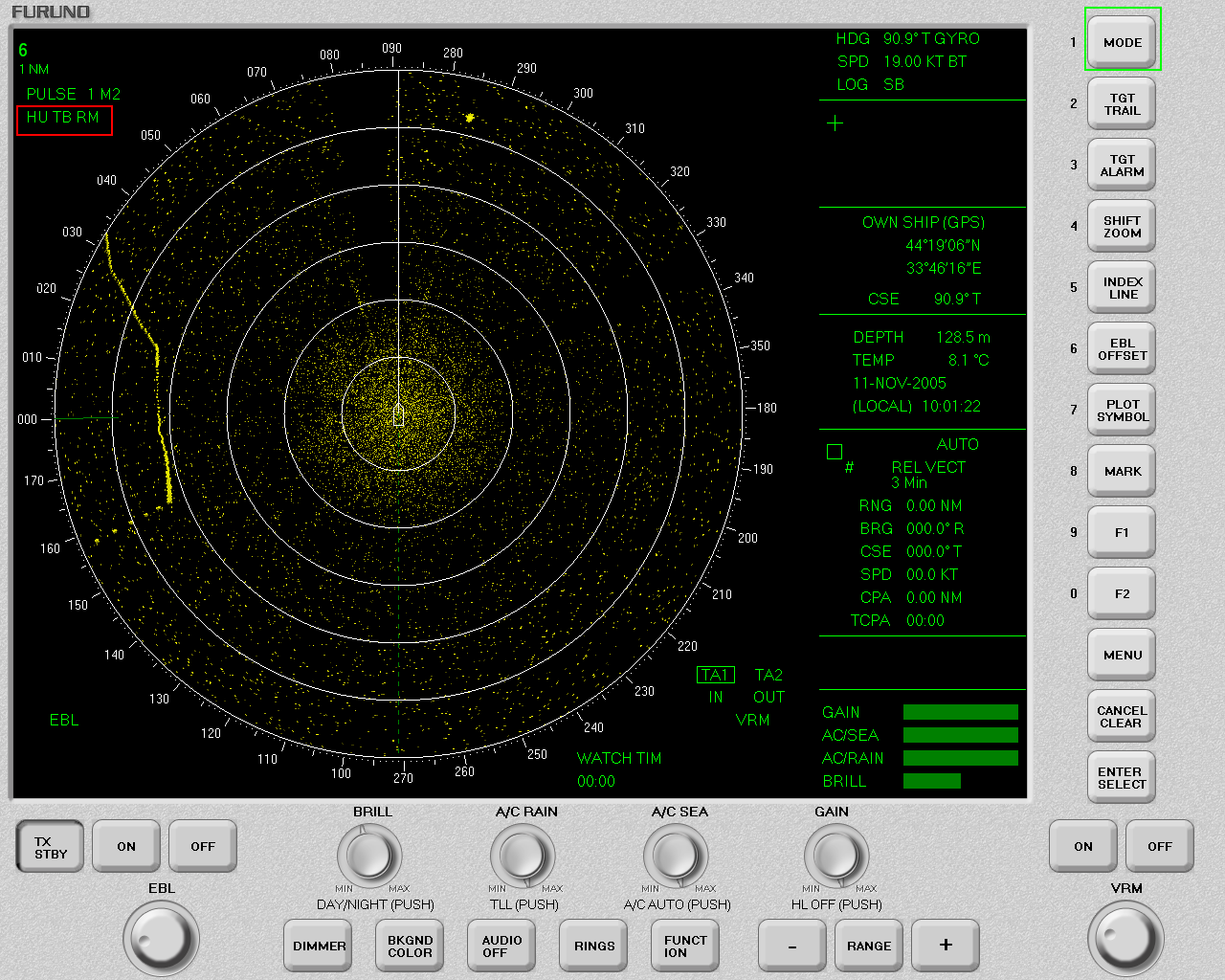 рис.2.4.88  рис.2.4.89 рис.2.4.90 4.3 Для смены ориентации изображения на ИКО надо навести курсор трекбола на кнопку При стабилизации относительно грунта центральная точка ИКО, центре первого неподвижного кольца дальности (место собственного судна), на рис.2.4.91, обозначен знаком судна , остается неподвижным относительно отображенного на ИКО эхосигнала. Информация о выбранном режиме ориентации отображается в верхней левой части монитора, рис.2.4.88, обведено красным прямоугольником место отображение информации о выбранном режиме ориентации, информация “CU RM”, рис.2.4.92, соответствует режиму ориентации по курсу судна, стабилизировано изображение относительно грунта, о чем говорит сокращение “RM”, рис.2.4.92. 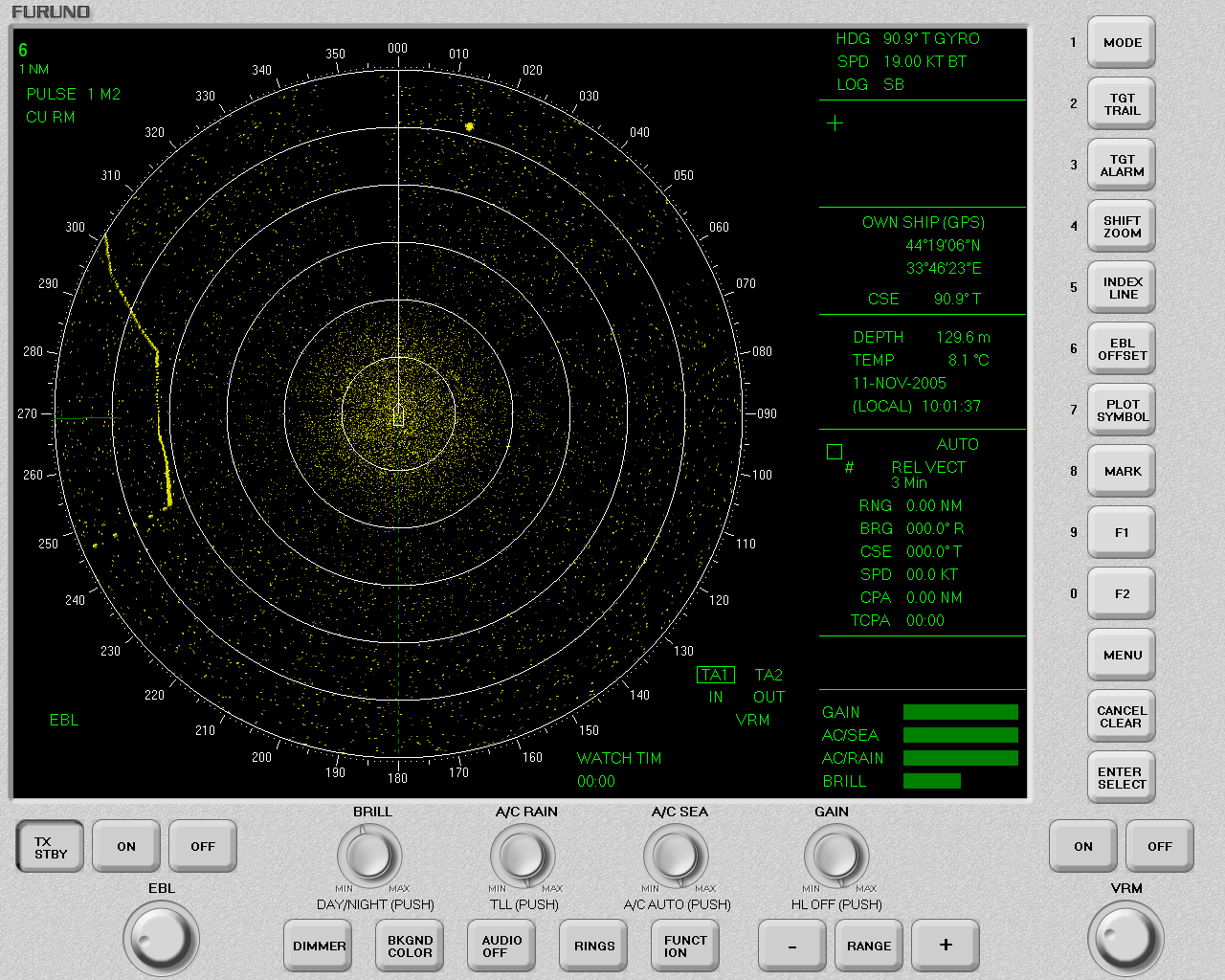 рис.2.4.91 рис.2.4.92 4.4 Для смены ориентации изображения стабилизированного по северу, режим стабилизации относительно грунта на ИКО, надо навести курсор трекбола на кнопку 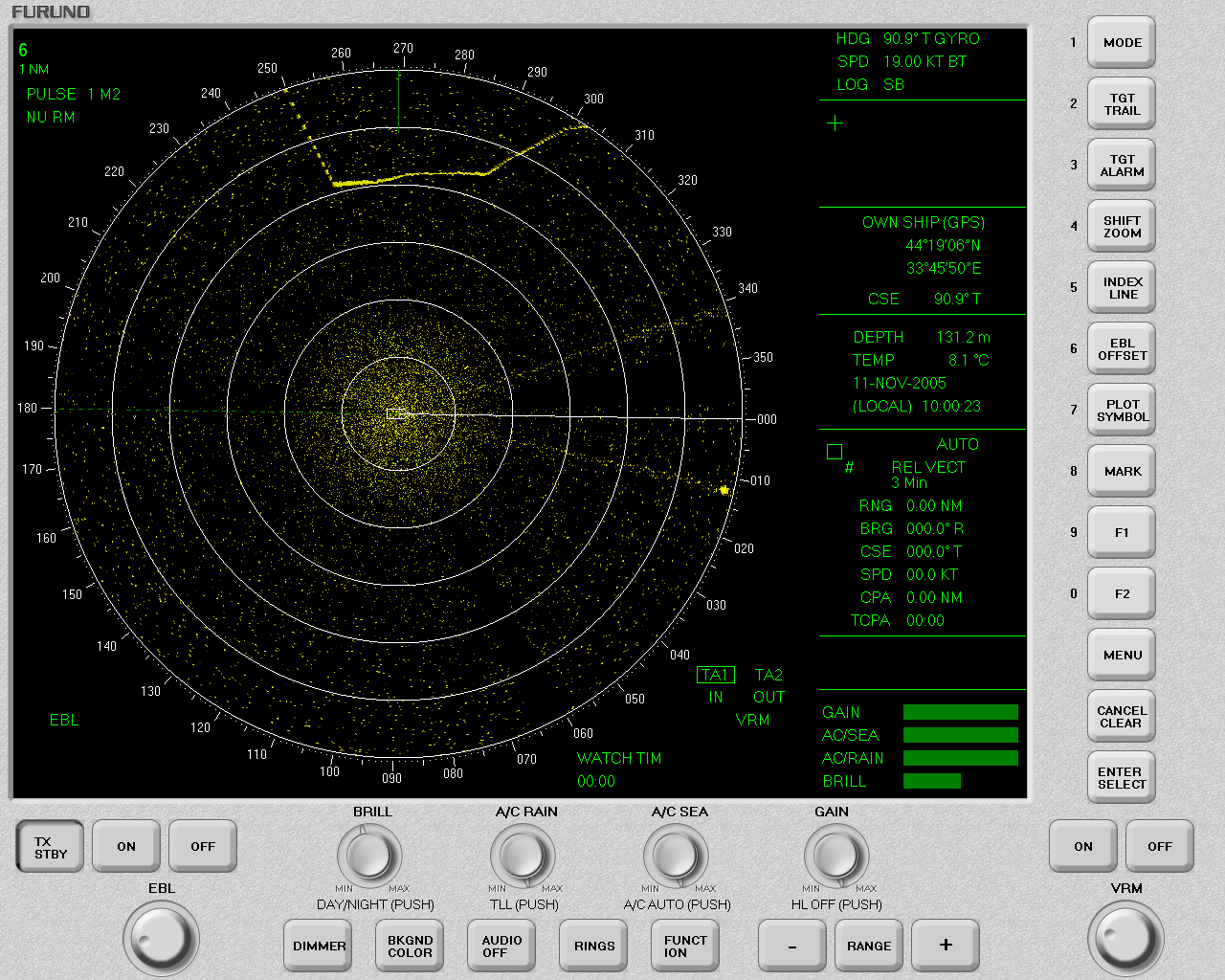 рис.2.4.93 При режиме ориентации изображения стабилизированного по северу изображение на ИКО выравнивается так, чтобы север всегда находился в вершине ИКО (отметка севера (зеленного цвета прямая линия) показывает направления севера, находится в вершине ИКО рис.2.4.94.) отметка курса указывает курс собственного судна и всегда направлена на значение шкалы ИКО 000 градусов, рис.2.4.95. рис.2.4.94  рис.2.4.95 При стабилизации относительно грунта центральная точка ИКО, центре первого неподвижного кольца дальности (место собственного судна), на рис.2.4.88, обозначен знаком судна , остается неподвижным относительно отображенного на ИКО эхосигнала. Информация о выбранном режиме ориентации отображается в верхней левой части монитора, рис.2.4.88, обведено красным прямоугольником место отображение информации о выбранном режиме ориентации, информация “NU RM”, рис.2.4.96, соответствует режиму ориентации по северу судна, стабилизировано изображение относительно грунта, о чем говорит сокращение “RM”, рис.2.4.96. рис.2.4.96 4.5 Для смены ориентации изображения стабилизированного по северу, режим стабилизации относительно воды на ИКО, надо навести курсор трекбола на кнопку 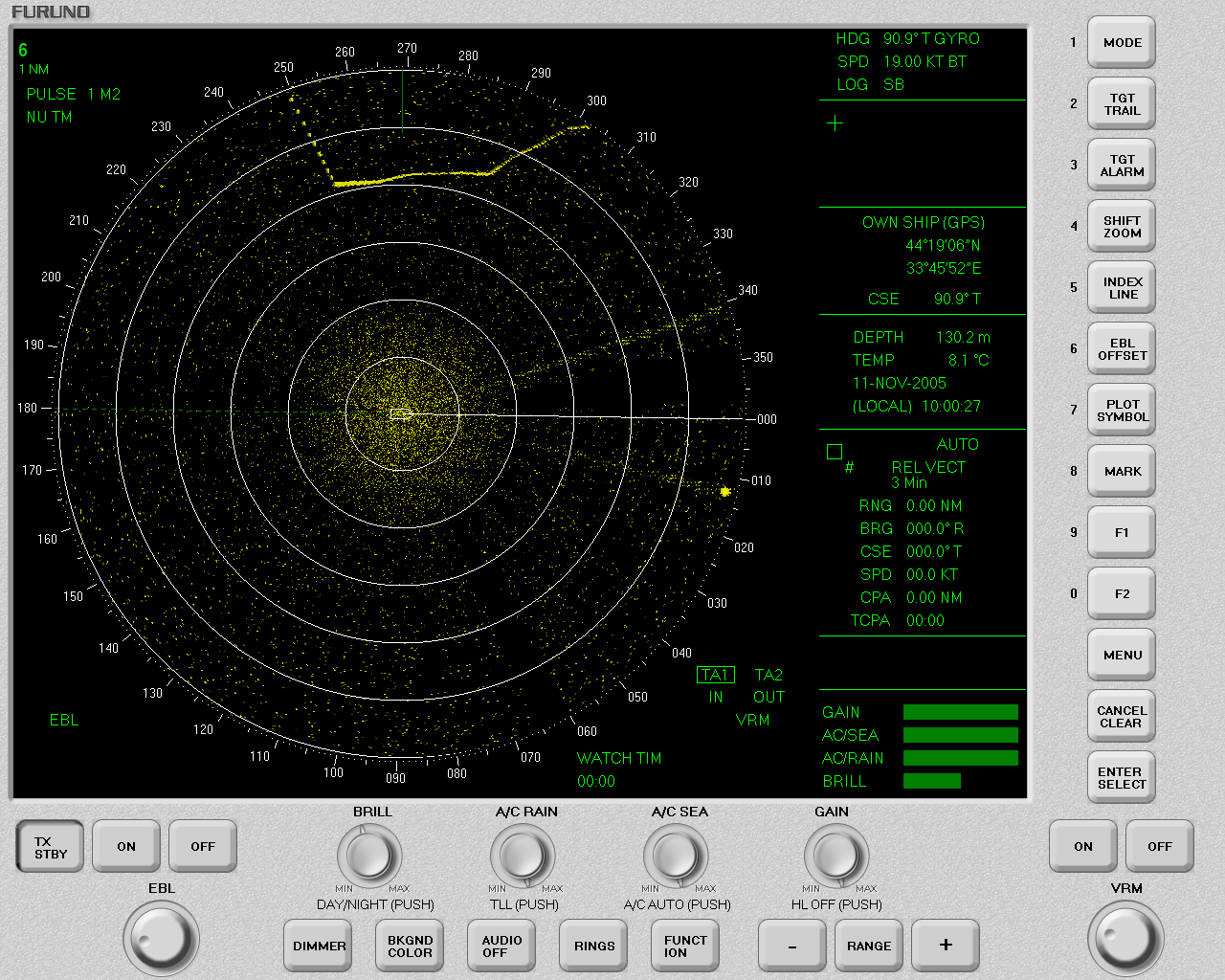 рис.2.4.97 При режиме ориентации изображения стабилизированного по северу изображение на ИКО выравнивается так, чтобы север всегда находился в вершине ИКО (отметка севера (зеленного цвета прямая линия) показывает направления севера, находится в вершине ИКО рис.2.4.97.) отметка курса указывает курс собственного судна и всегда направлена на значение шкалы ИКО 000 градусов, рис.2.4.95. В режим стабилизации относительно воды собственное судно (центр первого неподвижного кольца дальности, обозначено знаком судна ,) на рис.2.4.97 начинает перемещаться со скоростью собственного судна, таким образом место собственного судна на ИКО относительно эхо сигнала — подвижно. Информация о выбранном режиме ориентации отображается в верхней левой части монитора, рис.2.4.98, обведено красным прямоугольником место отображение информации о выбранном режиме ориентации, информация “NU TM”, рис.2.4.98, соответствует режиму ориентации по северу судна, стабилизировано изображение относительно грунта, о чем говорит сокращение “RM”, рис.2.4.98. рис.2.4.98 4.6 Для смены ориентации изображения стабилизированного по диаметральной плоскости судна, нулевая отметка азимутальной шкалы расположена вверху, стабилизировано изображение относительно грунта на ИКО, надо навести курсор трекбола на кнопку 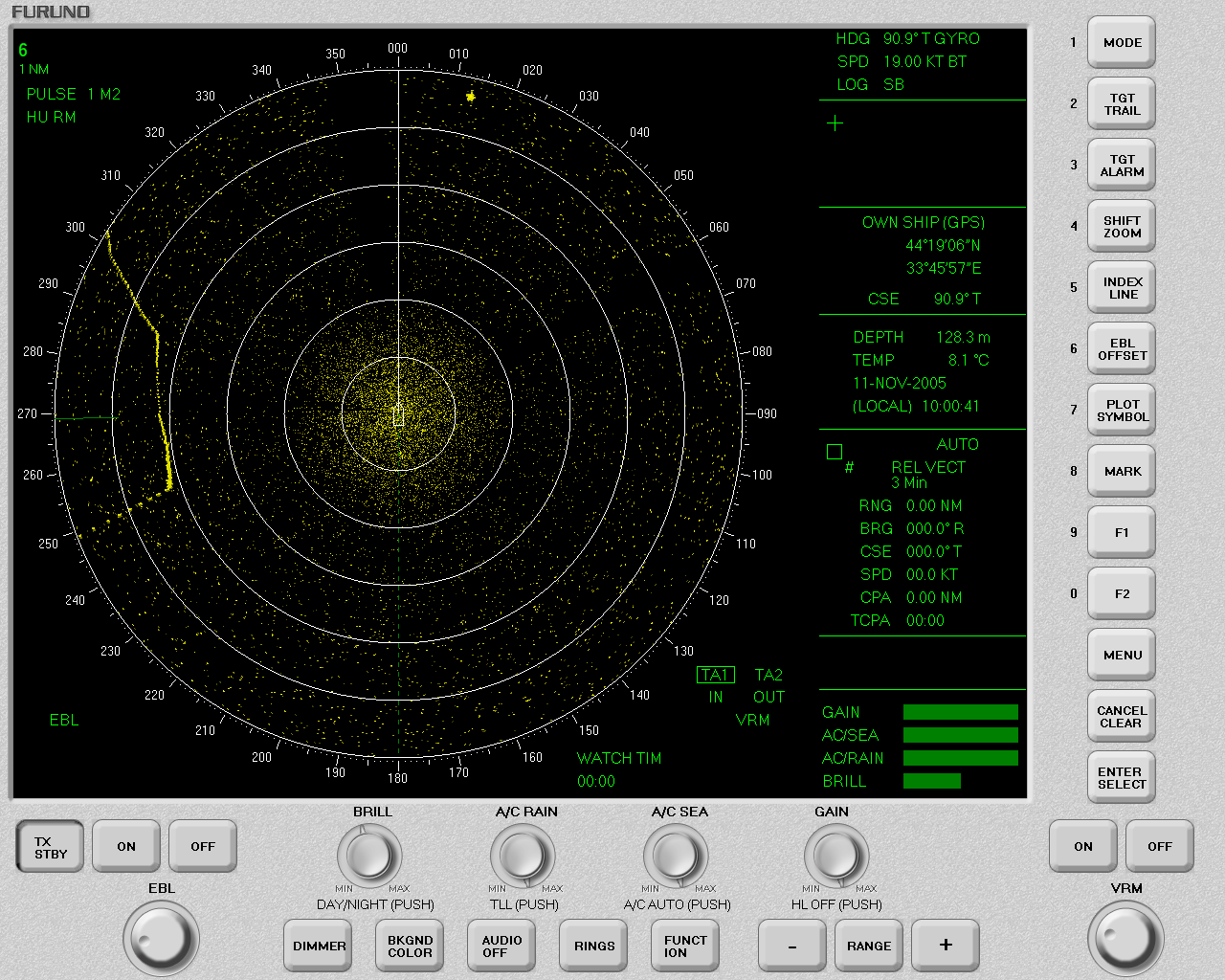 рис.2.4.99 Изображение на ИКО ориентированно по диаметральной плоскости судна, нулевая отметка азимутальной шкалы расположена вверху и остается не подвижной, стабилизировано изображение относительно грунта, рис.2.4.99. Отметка севера (зеленного цвета прямая линия) показывает направления севера, рис.2.4.100. рис.2.4.100 При стабилизации относительно грунта центральная точка ИКО, центр первого неподвижного кольца дальности (место собственного судна), на рис.2.4.88, обозначен знаком судна , остается неподвижным относительно отображенного на ИКО эхосигнала. Информация о выбранном режиме ориентации отображается в верхней левой части монитора, рис.2.4.88, обведено красным прямоугольником место отображение информации о выбранном режиме ориентации, информация “HU RM”, рис.2.4.101, соответствует режиму ориентации диаметральной плоскости судна, отметка азимутальной шкалы расположена вверху и остается не подвижной, стабилизировано изображение относительно грунта, о чем говорит сокращение “RM”, рис.2.4.101. рис.2.4.101
5.1 Пример рассматривается с использованием ситуации “RLS2_1.tsk”, методика загрузки ситуации на исполнения в главе 2.7. . 5.2 На мониторе ФТ РЛС/САРП в ИКО отображается дождевая зона, рис.2.4.102, обведена красным прямоугольником, дождевая зона — «пятно» на ИКО отображенное пикселями разных оттенков желтого цвета. Также в ИКО отображаются хаотические импульсные помехи, точки(пиксели) разного оттенка желтого цвета, помехи отчетливо видны в центре ИКО так как имитируется «засветка» от собственного радара, которая дает хаотические импульсные помех рис.2.4.103. Помехи от моря представляют собой хаотически отображенные точки(пиксели) разного оттенка желтого цвета, рис.2.4.104. 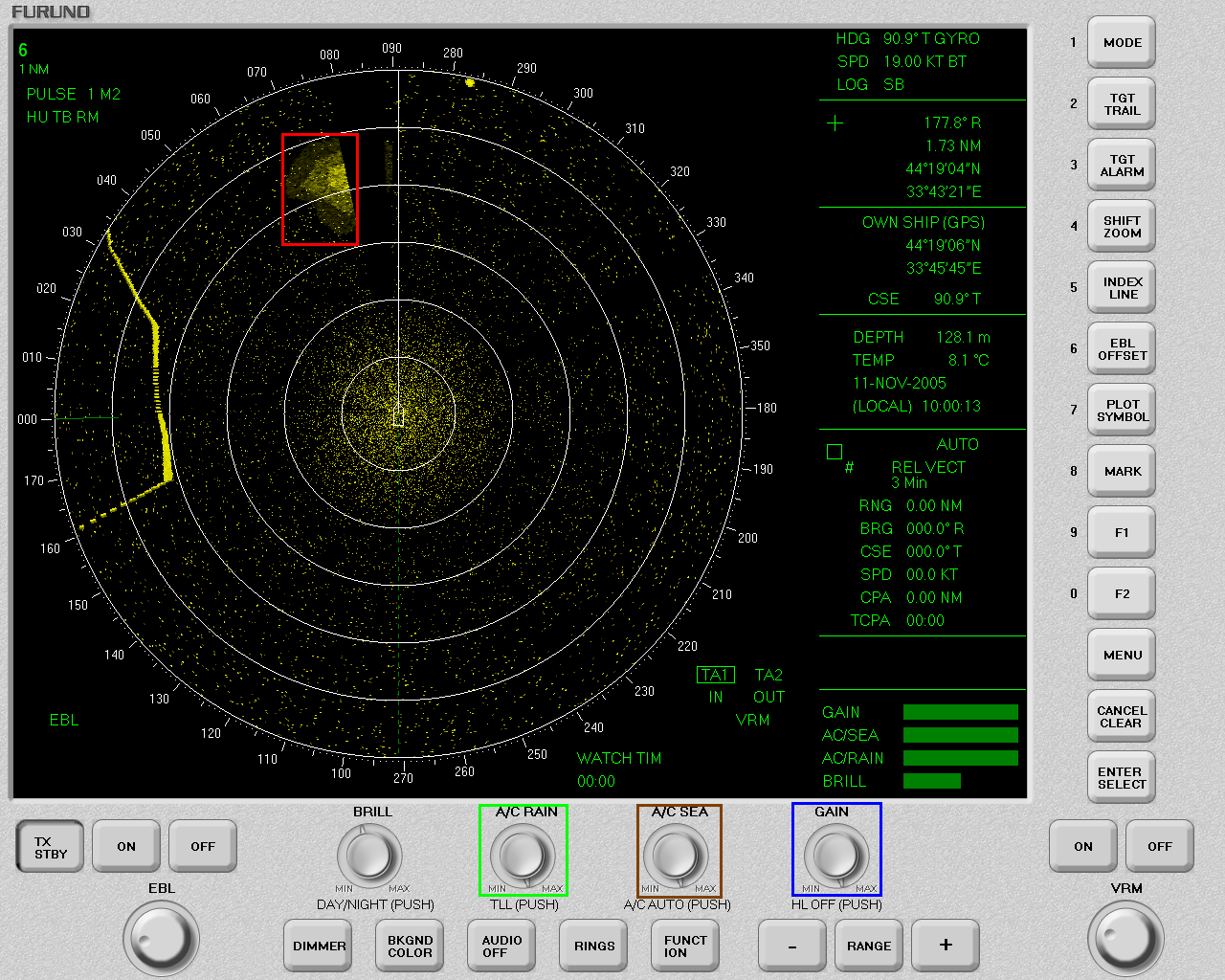 рис.2.4.102  рис.2.4.103  рис.2.4.104 5.3. Для регулирования интенсивности помех дождевой зоны (интенсивность помех дождевой зоны — количество пикселей ярко желтого цвета, на площади дождевой зоны), надо навести курсор трекбола на ручку регулировки помех от дождя “A/C RAIN”, рис.2.4.102, обведено зеленым прямоугольником и нажать ПКТ. Удерживая ПКТ перемещать курсор трекбола против часовой стрелки, имитируя вращение ручки до значения “min”, рис.2.4.105. При значении интенсивности помех дождевой зоны “min”, дождевая зона рис.2.4.106, обведена красным прямоугольником, будет отличатся в меньшую сторону по интенсивности от интенсивности дождевой зоны на рис.2.4.102, дождевая зона обведена красным прямоугольником.  рис.2.4.105 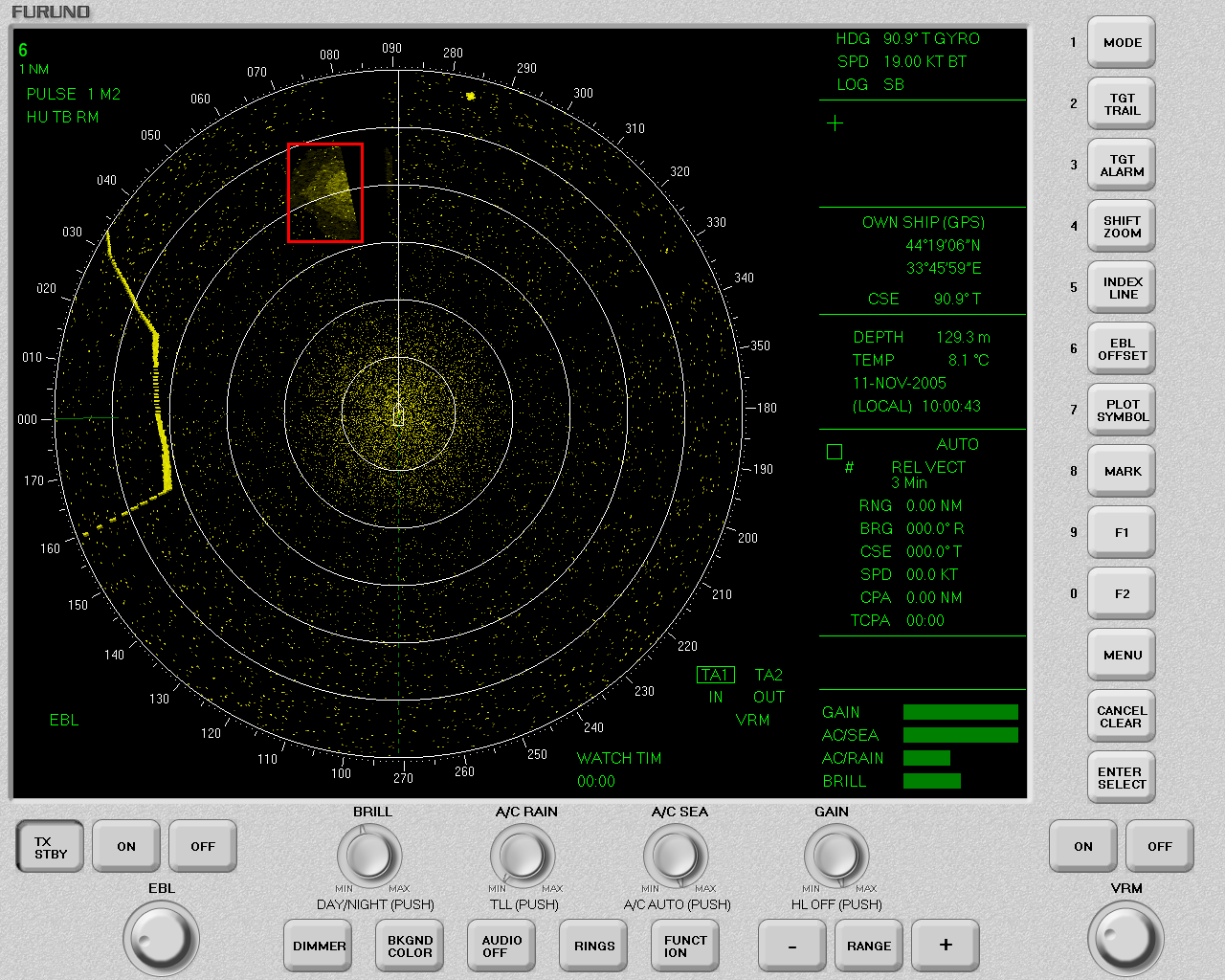 рис.2.4.106 5.4 Для регулирования интенсивности хаотических импульсных помех (интенсивность хаотических импульсных помех — количество пикселей ярко желтого цвета, в центре ИКО), надо навести курсор трекбола на ручку регулировки хаотических импульсных помех “GAIN”, рис.2.4.102, обведено синим прямоугольником и нажать ПКТ. Удерживая ПКТ перемещать курсор трекбола против часовой стрелки, имитируя вращение ручки до значения “min”, рис, 2.4.107. При значении интенсивности хаотических импульсных помех “min”, хаотические импульсные помехи рис.2.4.108, будет отличатся в меньшую сторону по интенсивности от интенсивности хаотических импульсных помех на рис.2.4.103.  рис.2.4.107  рис.2.4.108 5.5 Для регулирования интенсивности помех от моря (интенсивность помех от моря — количество пикселей ярко желтого цвета, на площади ИКО), надо навести курсор трекбола на ручку регулировки хаотических импульсных помех “A/C SEA”, рис.2.4.102, обведено коричневым прямоугольником и нажать ПКТ. Удерживая ПКТ перемещать курсор трекбола против часовой стрелки, имитируя вращение ручки до значения “min”, рис.2.4.109. При значении интенсивности помех от моря “min”, помех от моря рис.2.4.110, будет отличатся в меньшую сторону по интенсивности от интенсивности помех от моря на рис.2.4.109.  рис.2.4.109  рис.2.4.110
6.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7. 6.2 В правой верхней части экрана ФТ РЛС/САРП располагается информация о гироскопическом курсе собственного судна, рис.2.4.111, обведено красным прямоугольником, и информация о скорости собственного судна, рис.2.4.111, обведено синим прямоугольником. В окне индикации гироскопического курса собственного судна, значения курса отображается после буквенного обозначения “HDG”, рис.2.4.112, обведено значение курса красным прямоугольником, значение курса в градусах. В окне индикации скорости собственного судна, значения скорости отображается после буквенного обозначения “SPD”, рис.2.4.113, обведено значение скорости синим прямоугольником, значение скорости в узлах. 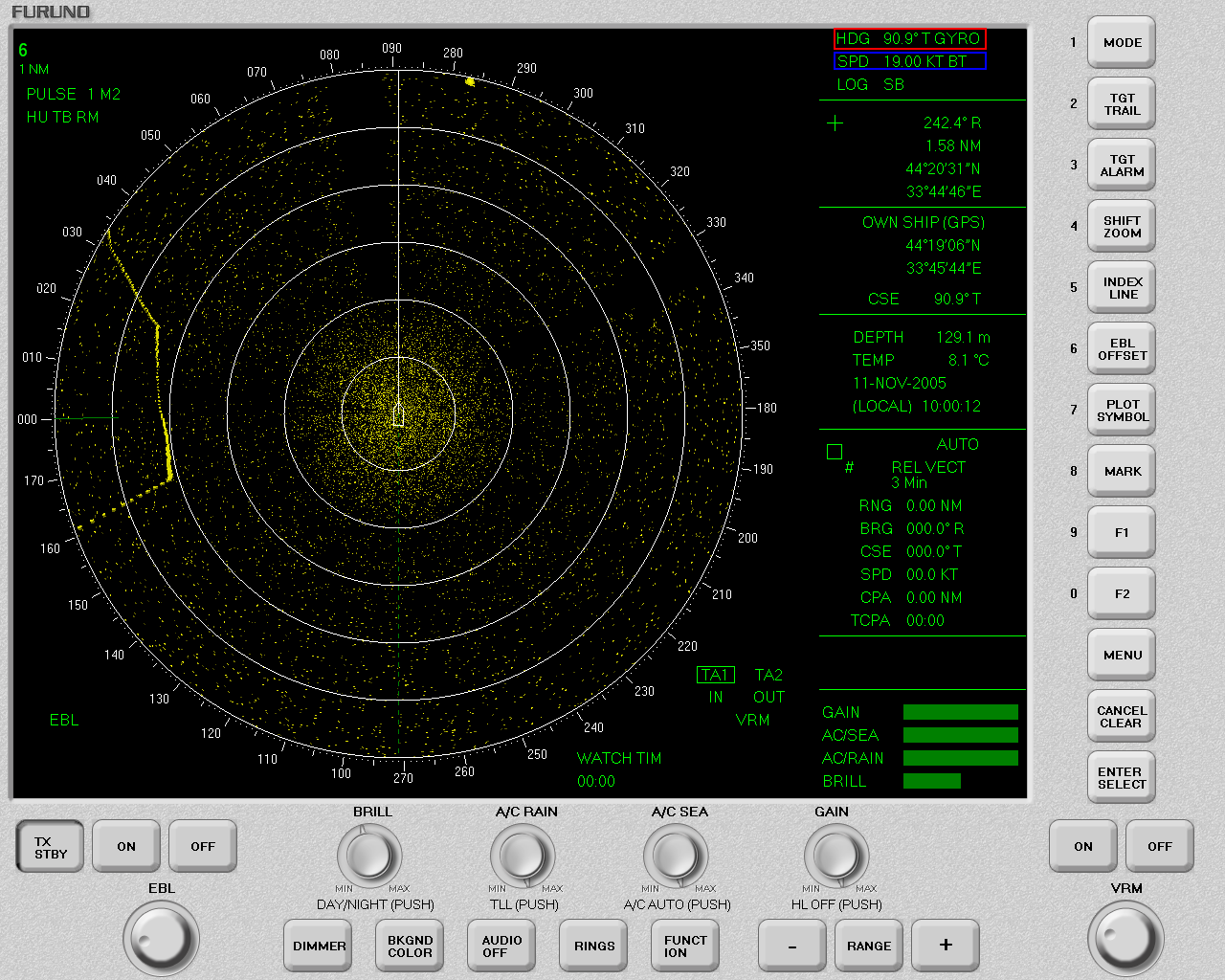 рис.2.4.111 рис.2.4.112 рис.2.4.113
7. Пример рассматривается с использованием ситуации “RLS3_1.tsk”, методика загрузки ситуации на исполнения в главе 2.7. 7.2 Для ручного захвата цели на сопровождение надо курсор трекбола на экране ФТ РЛС/САРП в ИКО навести на эхосигнал цели рис.2.4.114, цель обведена красным прямоугольником (цель — скопление желтых точек(пикселей) на бесконечно малом по площади участке ИКО) и нажать ЛКТ. Цель взялась на автосопровождение, рис.2.4.115 при захвате на автосопровождения цели над целью появляется графическая индикация в форме зеленного кружка, рис.2.4.116, и порядкового номер (цифровая индикация) располагается возле графического кружка индикации взятия цели на автосопровождение. 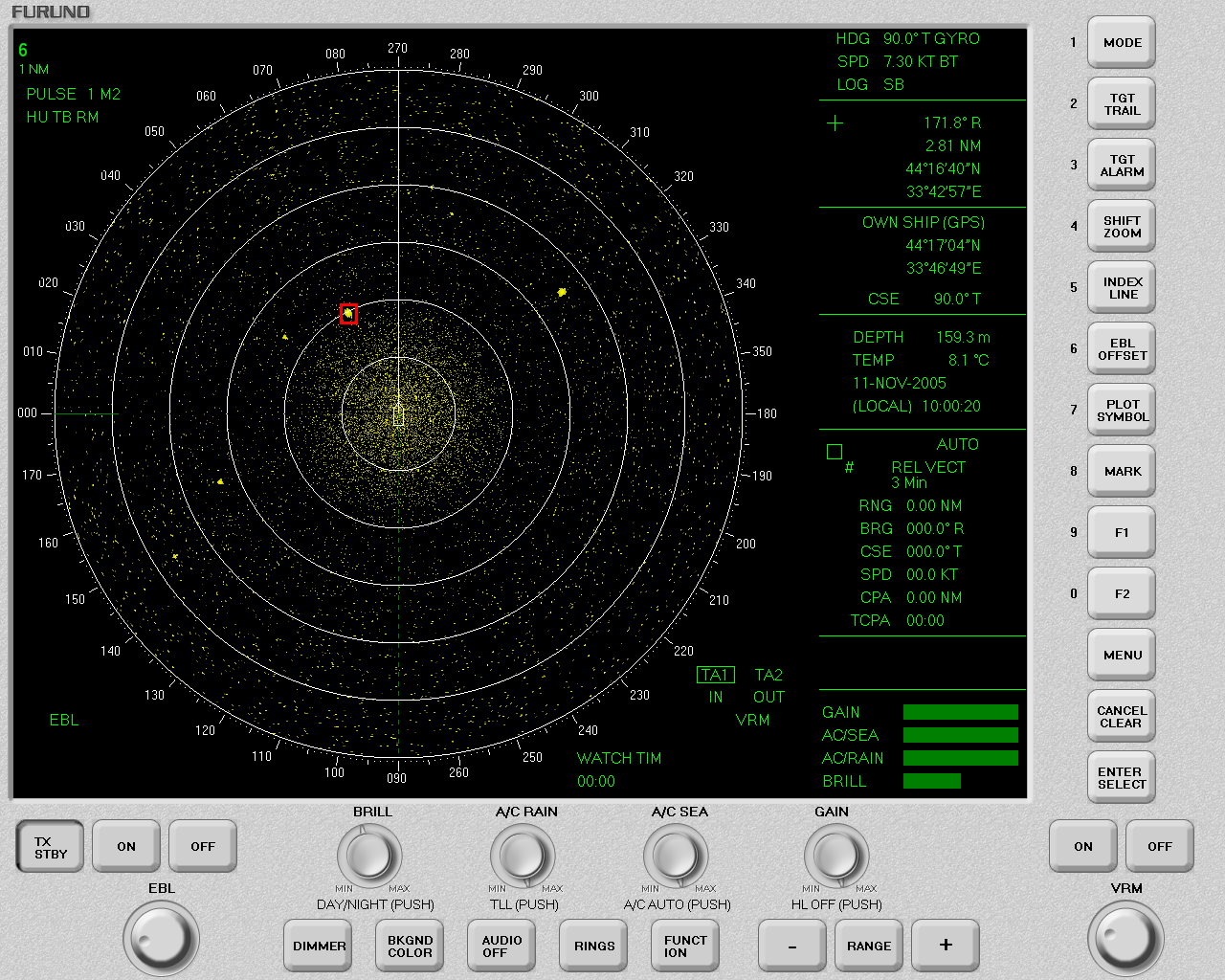 рис.2.4.114 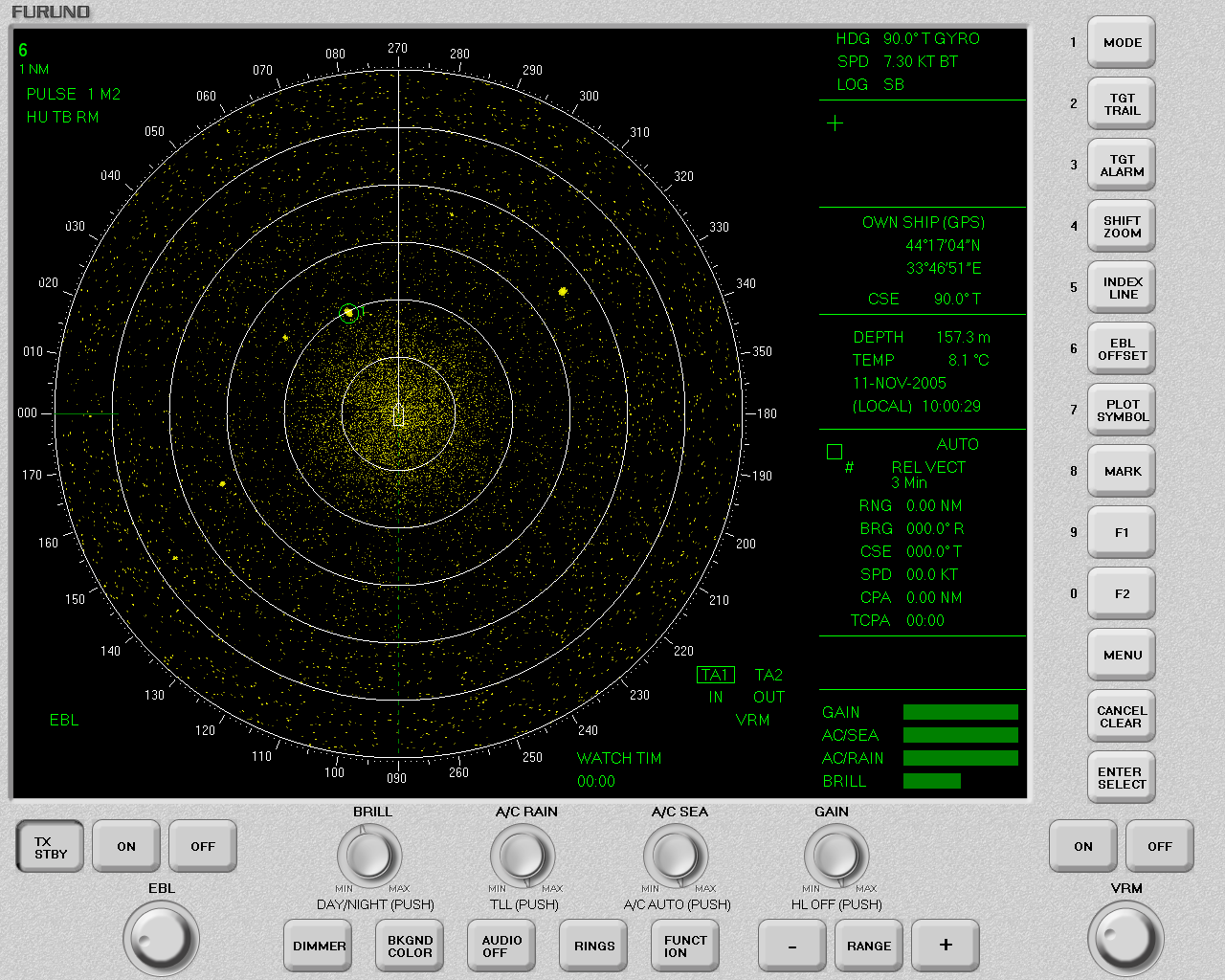 рис.2.4.115 рис.2.4.116 7.3 Для снятие цели с сопровождения надо навести курсор трекбола на взятую на автосопровождения цель номер 1, рис.2.4.115, нажать ПКТ. Далее надо подвести курсор трекбола на кнопку 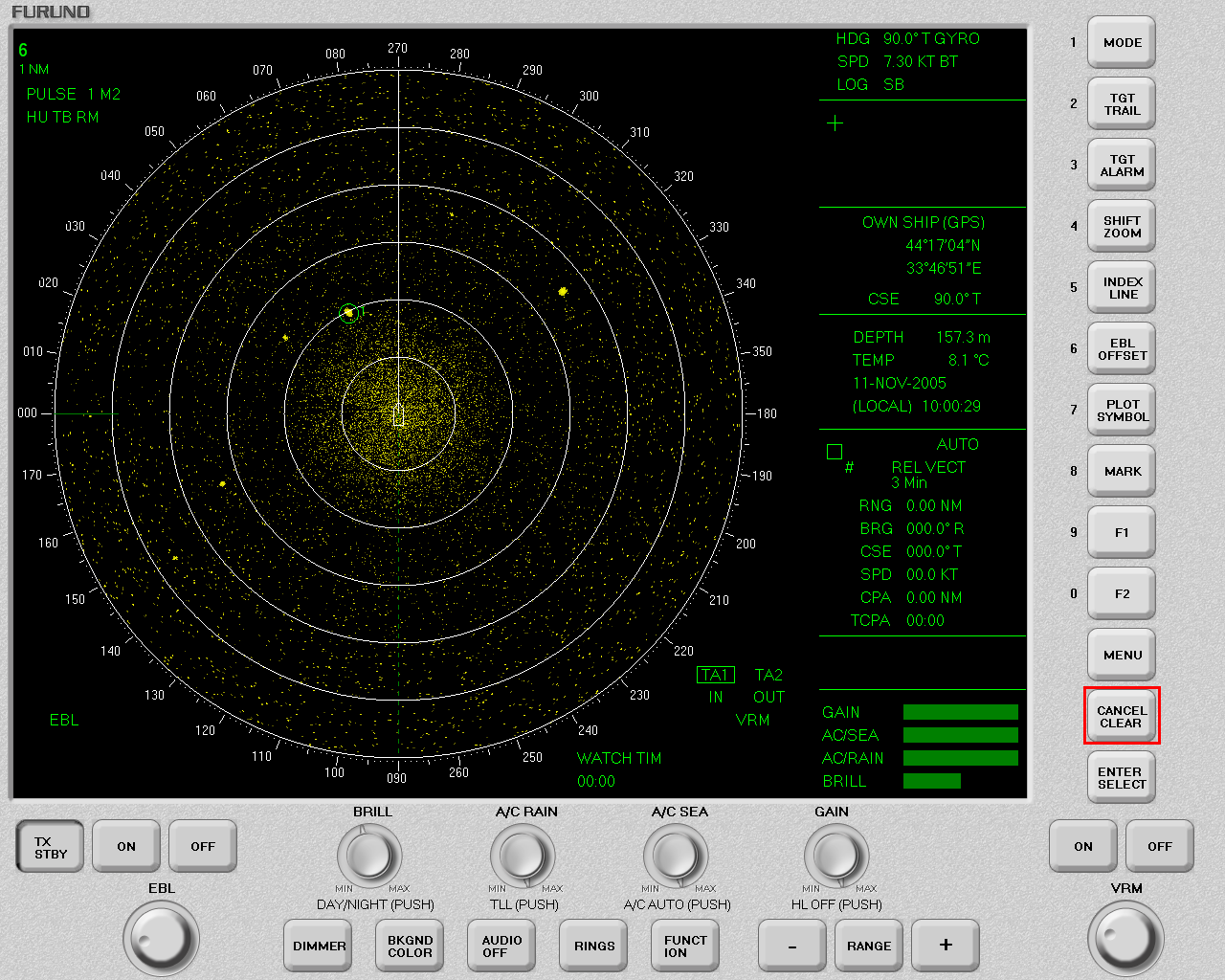 рис.2.4.117 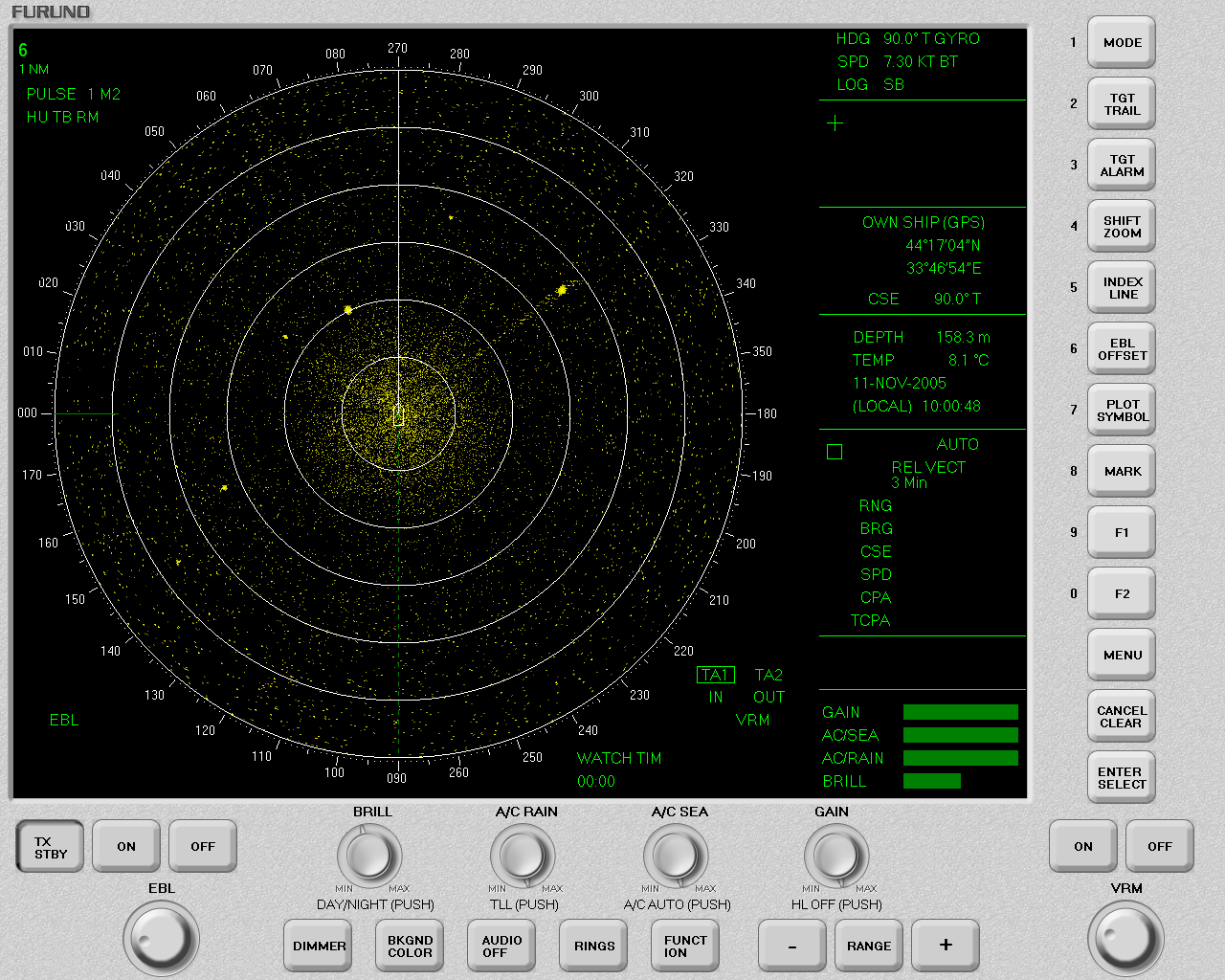 рис.2.4.118 |