РЛС_Литер Нави. Руководство предназначено пользователям мультифункционального навигационного тренажера литер navy версия 7
 Скачать 43.61 Mb. Скачать 43.61 Mb.
|

|
Графическая и текстовая информация о целее взятой на сопровождение. 10.1 Выполнить действия описанные в пунктах 9.1, 9.2. 10.2 Засечь три минуты. По пришествию трех минуть выработается вектор движения судна, рис.2.4.40. Длина вектора — скорость судна взятого на сопровождения, направление вектора соответствует курсу судна, вектор представляет собой прямую линию зеленного цвета выходящую с кружка(графической индикации взятия цели на сопровождение), рис.2.4.41. 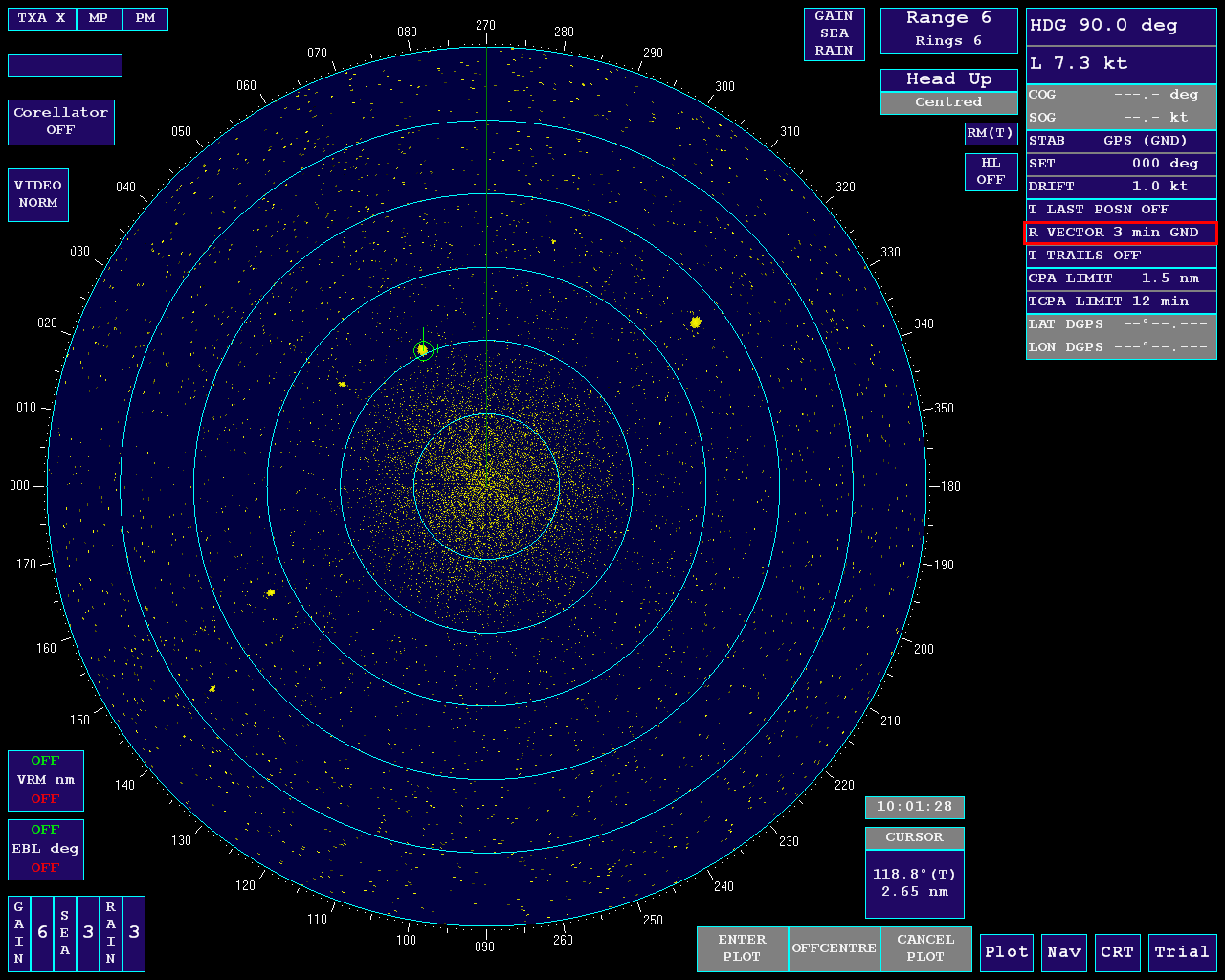 рис.2.4.40 рис.2.4.41 10.3 Длину отображаемого вектора (время экстраполирования информации) регулируется в окне регулирования значения вектора цели, рис.2.4.40, обведено окно красным прямоугольником. Для регулирования длины вектора надо на окно регулирования значения вектора цели навести курсор трекбола и нажимать ЦКТ до тех пор пока значение длины вектора не будет равно 30 секундам. Значение вектора отображается цифрой в окне регулирования значения вектора цели, рис.2.4.42, значение обведено красным прямоугольником. рис.2.4.42 10.4 Продолжая удерживать курсор трекбола над окном регулирования значения вектора цели, нажать ПКТ. Значение длины вектора цели станет 1 минута, рис.2.4.43. рис.2.4.43 10.5 Удерживая курсор трекбола над окном регулирования значения вектора цели, нажимать ПКТ, значение длины вектора будут равны таким значениям 2, 3, 6, 12, 15, 20, 25, 30 минут. На рис.2.4.44, вектор длиной в 30 минут. 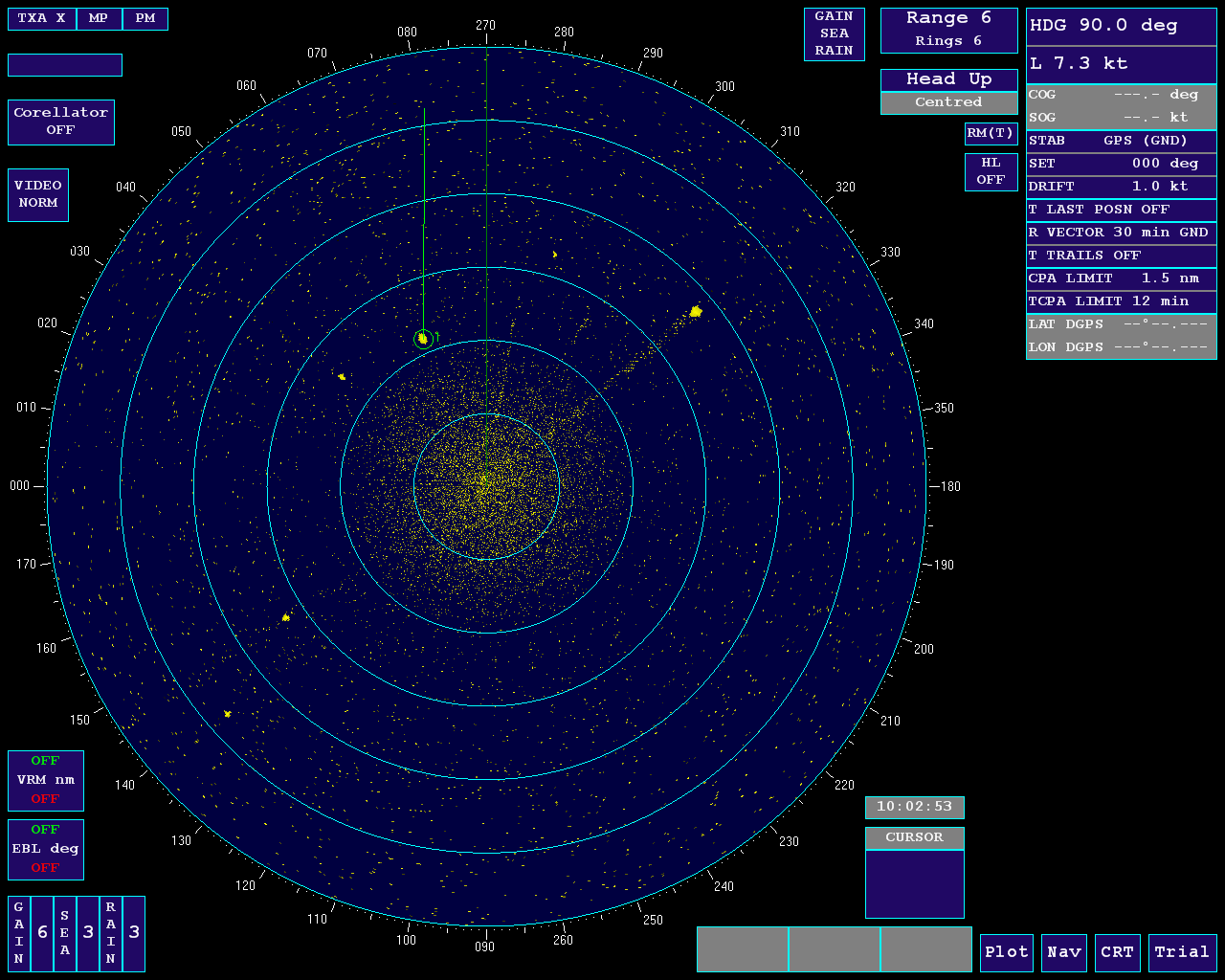 рис.2.4.44 10.6 По умолчанию вектор движения цели отображается в относительно режиме, для изменения режима отображения вектора в истинный режим отображения надо навести курсор трекбола на окном регулирования значения вектора цели, рис.2.4.40 обведено красным прямоугольником, нажать ЛКТ. Вектор будет отображаться в истинном режиме, рис.2.4.45. Для выбора режима относительно отображения вектора цели надо удерживая курсор трекбола над окном регулирования значения вектора цели, рис.2.4.40 обведено красным прямоугольником, нажать ЛКТ. Вектор будет отображаться в относительном режиме, рис.2.4.46. 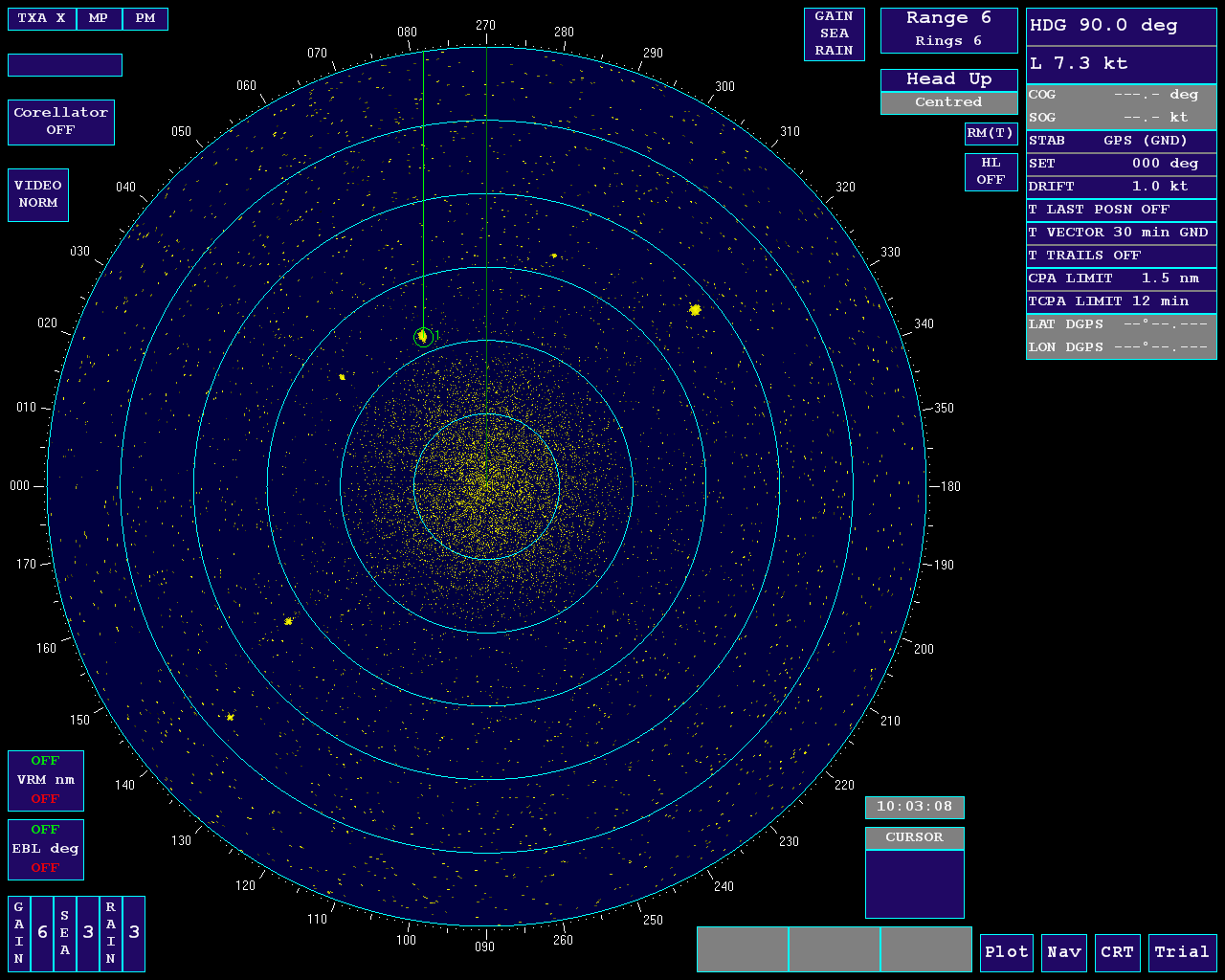 рис.2.4.45 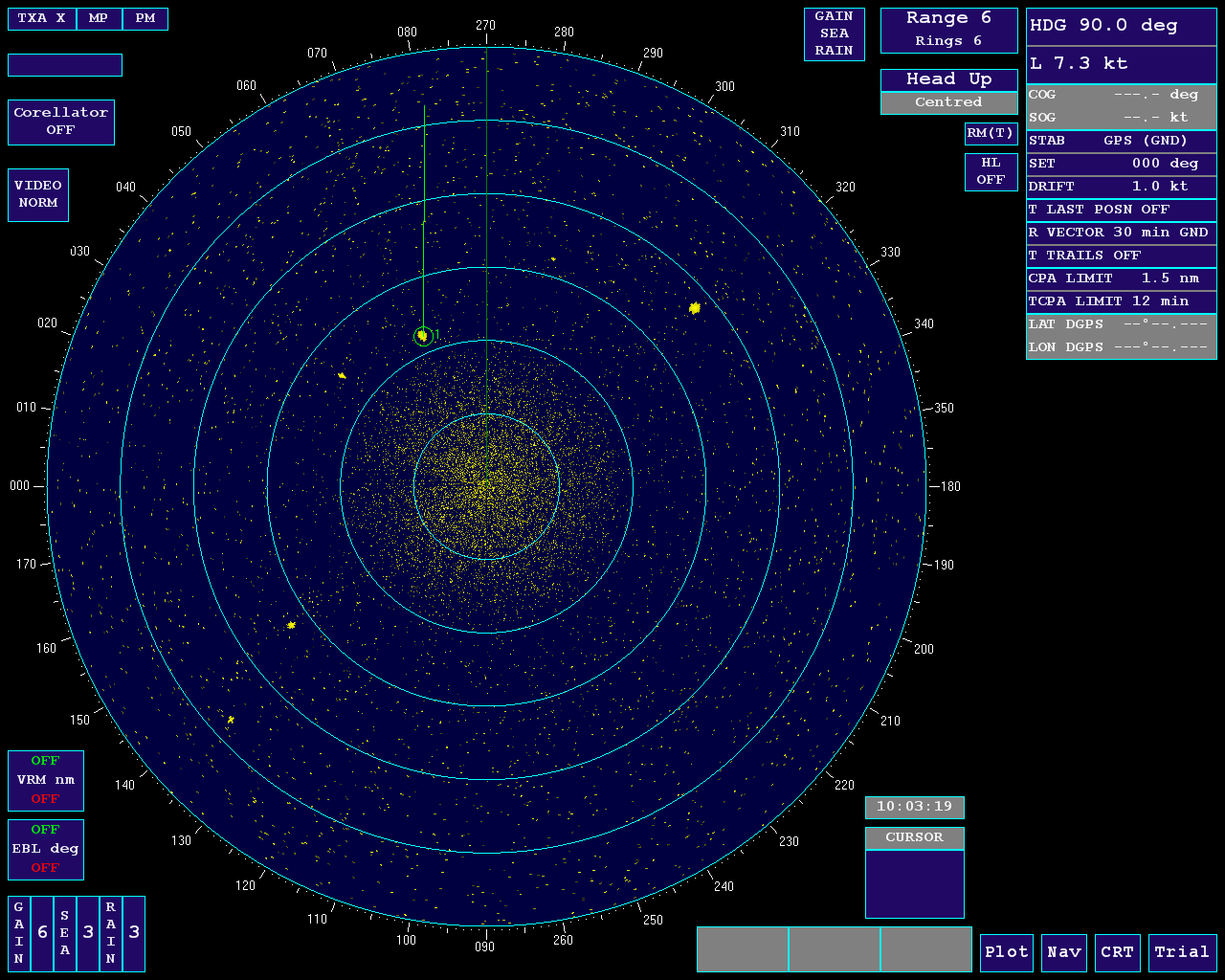 рис.2.4.46 10.7 Чтоб просмотреть информацию по цели взятой на автосопровождение надо навести курсор трекбола на цель взятую на автосопровождение и нажать ЛКТ. Цель очертится синим квадратиком, рис.2.4.47, что означает информация о целе выведена на экран, окно с информацией о целе располагается в правой части от ИКО, рис.2.4.48 обведено красным прямоугольником.  рис.2.4.47 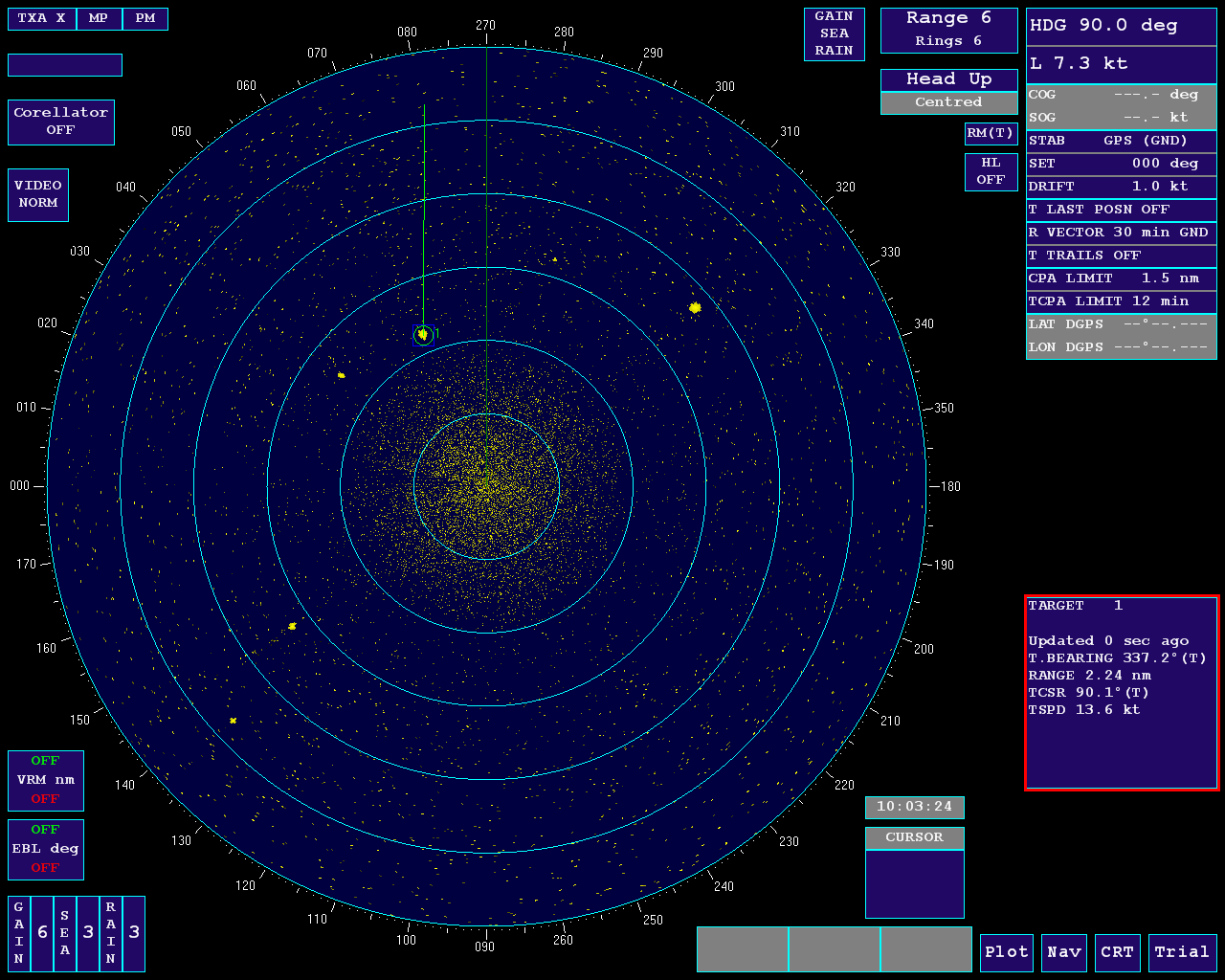 рис.2.4.48 10.8 В окне информации о цели рис.2.4.49, присутствует такая информация как пеленг цели в градусах, в строке “T.BEARING”, дальность цели в милях, в строке “RANGE”, курс цели в градусах, в строке “TCSR”, скорость цели в узлах, в строке “TSPD” 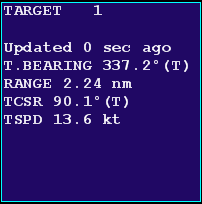 рис.2.4.49
11.1 Выполнить действия описанные в пункте 9.1, 9.2. 11.2 Навести курсор трекбола на кнопку “Plot”, которая располагается в правой нижней части экрана ПО РЛС/САРП, рис.2.4.50, обведена красным прямоугольником нажать ЛКТ. 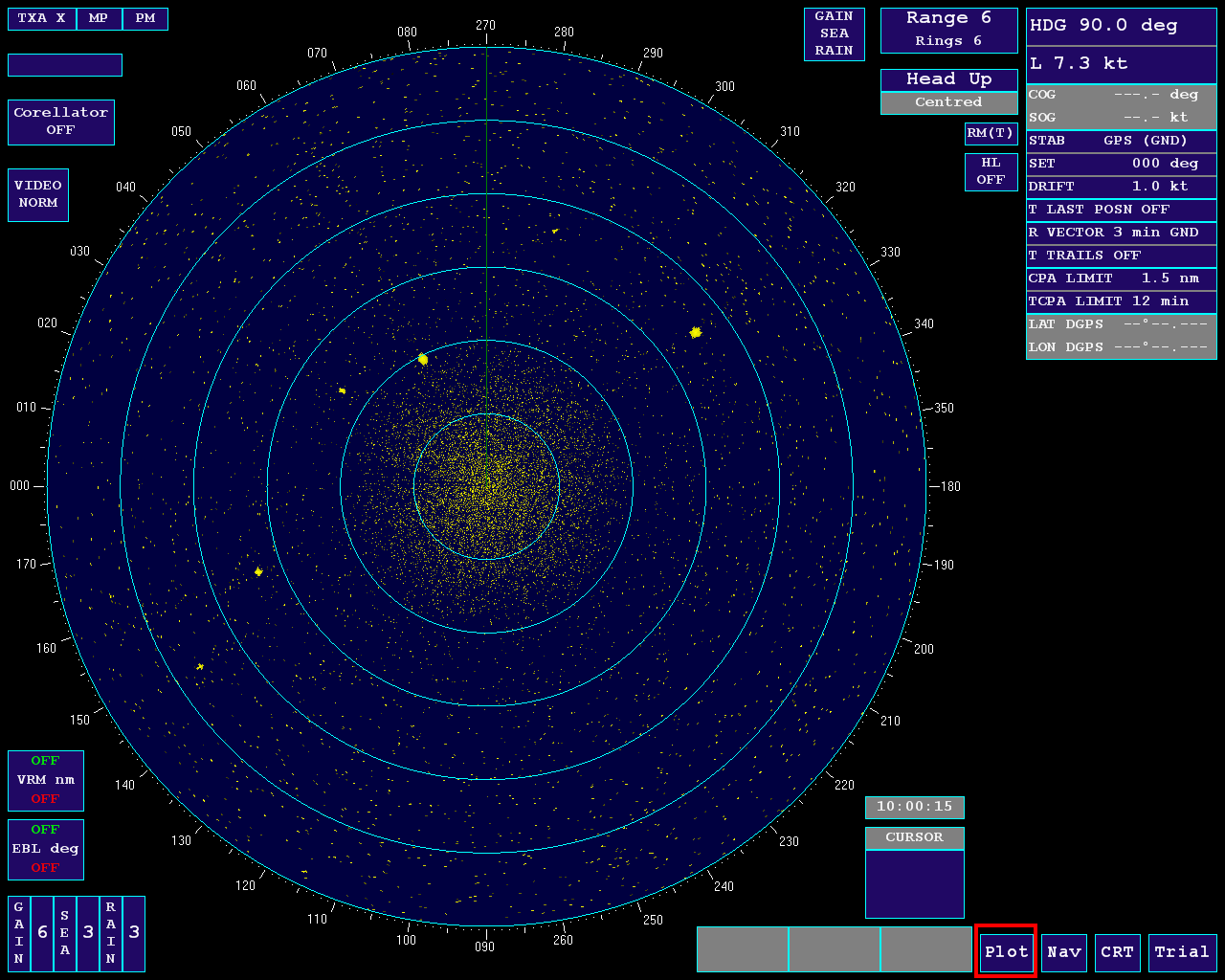 рис.2.4.50 11.3 Внизу экрана над кнопкой “Plot”, появится две кнопки рис.2.4.51. Подвести курсор трекбола на кнопку “HIST OFF”, нажать ЛКТ. Кнопка “ HIST OFF ”, рис.2.4.52 обведена красным прямоугольником. 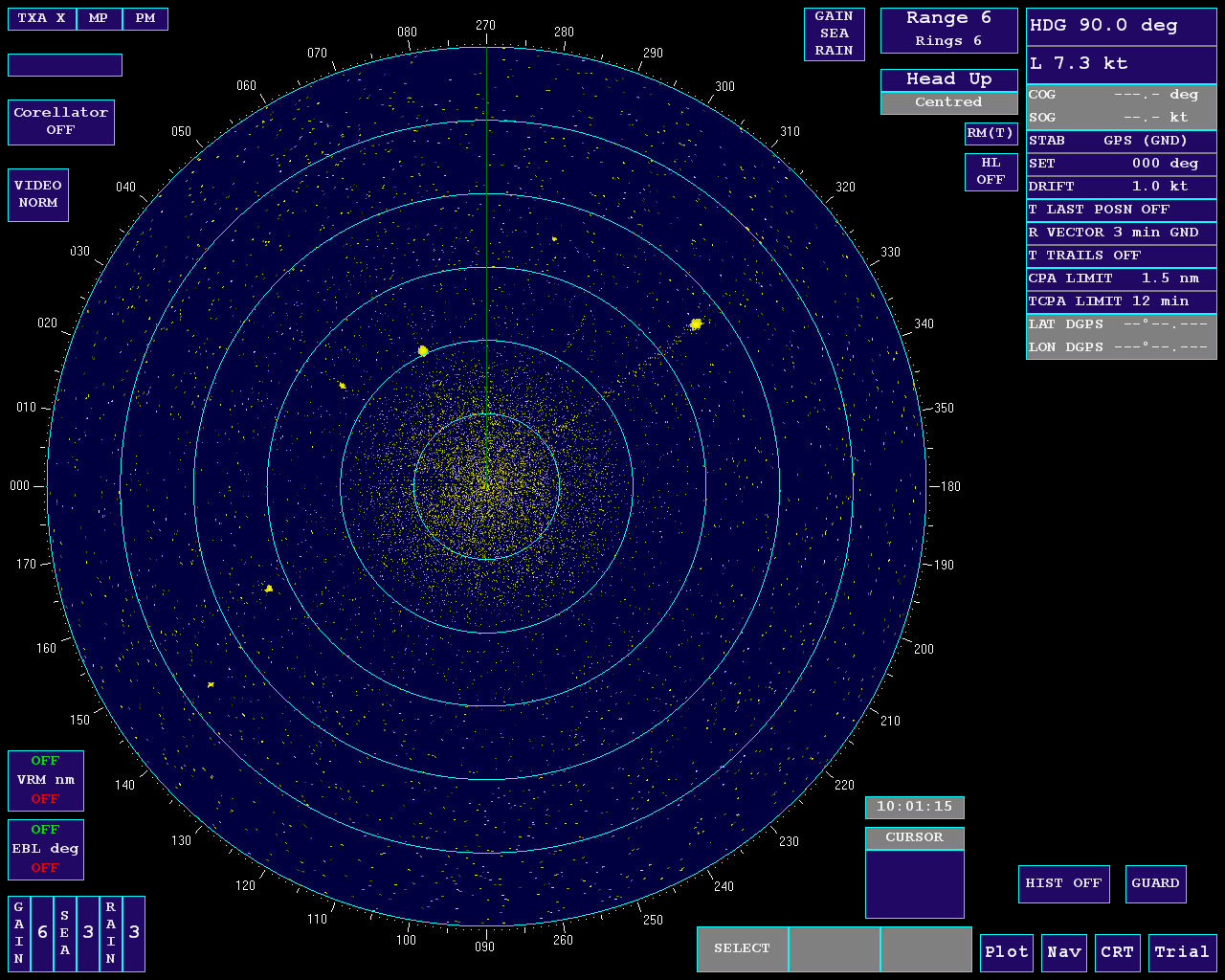 рис.2.4.51 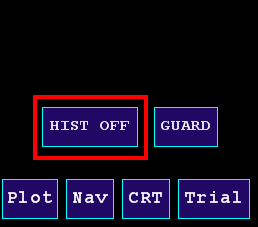 рис.2.4.52 11.4 После нажатия ЛКТ, кнопка “HIST OFF” поменяет надпись на “HIST ON” рис.2.4.53.  рис.2.4.53 11.5 Засечь 8 минут. Через девять минут в ИКО за целью номер 1 взятой на автосопровождение, будут стоять 4 равноудаленных траекторных точки желтого цвета, рис.2.4.54, обведены траекторные точки красным прямоугольником. 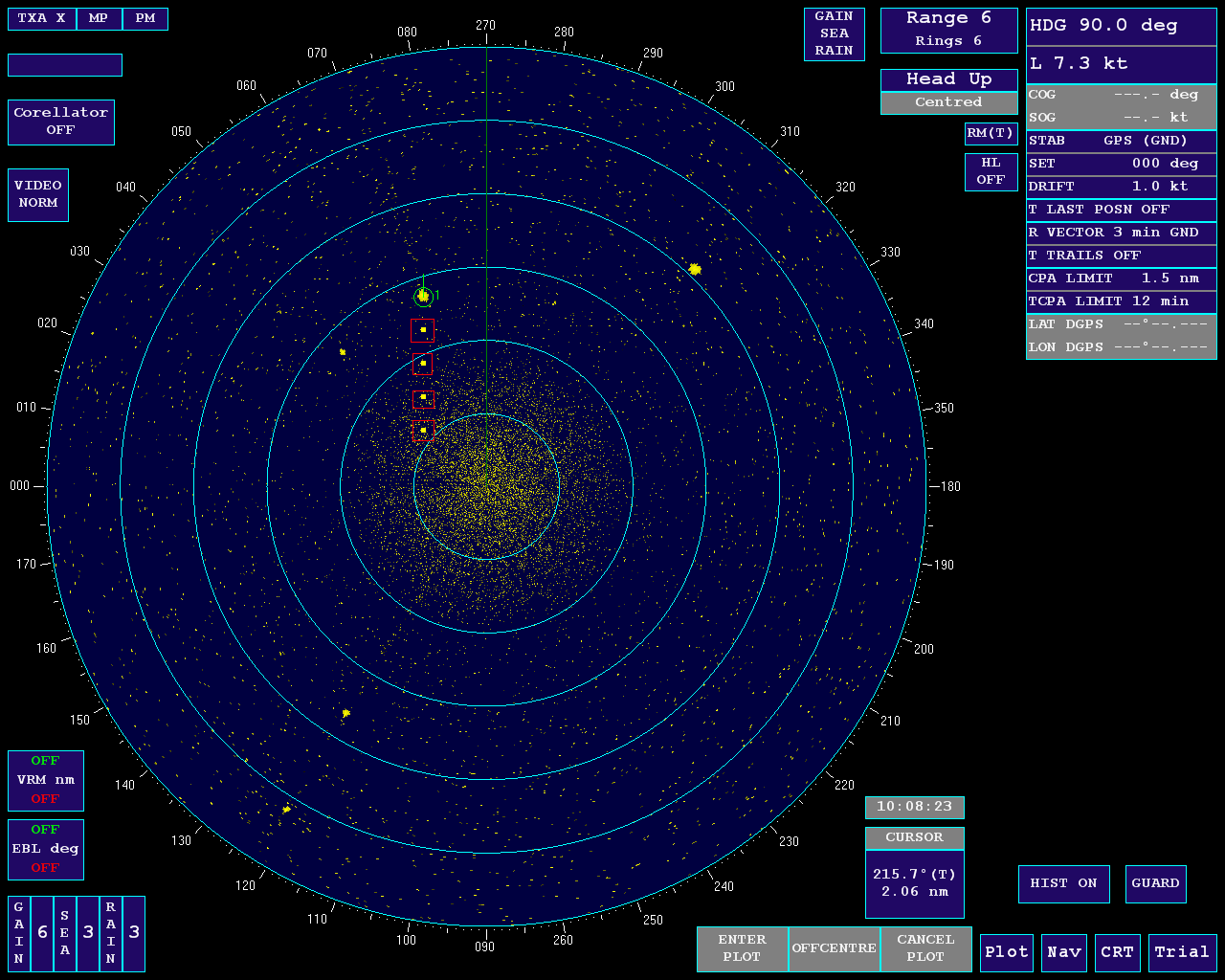 рис.2.4.54
12.1 Пример рассматривается с использованием ситуации “RLS3.tsk”, методика загрузки ситуации на исполнения в главе 2.7. Взять на сопровождение цели согласно рис.2.4.55. 12.2 Навести курсор трекбола в окне ПО РЛС/САРП на окно выбора дистанции наикротчайшего сближения “CPA LIMIT” рис.2.4.55, обведено красным прямоугольником. Нажать шесть раз ПКТ, значения дистанции наикротчайшего сближения станет равно 6 милям, рис.2.4.56. 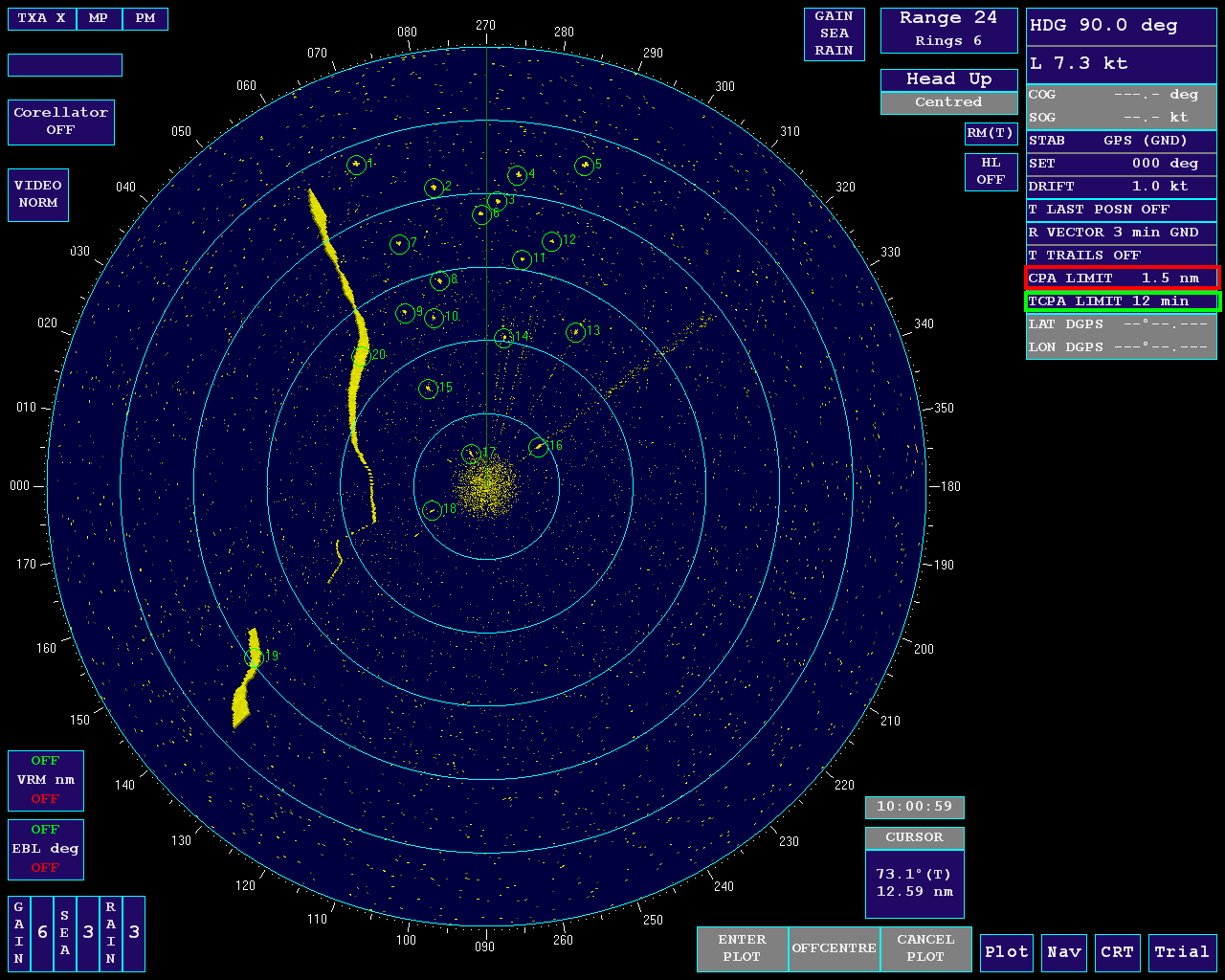 рис.2.4.55 рис.2.4.56 12.3 Навести курсор трекбола в окне ПО РЛС/САРП на окно выбора времени наикротчайшего сближения “TCPA LIMIT” рис.2.4.55, обведено зеленым прямоугольником. Нажать два раз ПКТ, значения дистанции наикротчайшего сближения станет равно 20 минутам, рис.2.5.57. рис.2.4.57 12.4 Через 21минут 20 секунд после начала упражнения, цели номер 11 окажется на дистанции кратчайшего сближения менее чем 6 миль, за менее чем время кратчайшего сближения 20 минут, ПО РЛС/САРП выдаст визуальную и звуковую сигнализацию по цели номер 11, рис.2.4.58. Через устройства воспроизведения звука будет слышен звуковой сигнал(короткие гудки), а кружок автосопровождения над целью номер 11, станет красного цвета, рис.2.4.59, и справа от ИКО отобразится окно предупреждения “DANGER TAGERT 11”, рис.2.4.60. 12.5 Навести курсор трекбола на цель номер 11, нажать ЛКТ. С право от ИКО появится окно информации о цели, согласно методики описанной в разделе 10, рис.2.4.61. В окне информации о цели, рис.2.4.62, в строке “CPA” значение 1.92 мили, обведено красным прямоугольником, значение дистанции кратчайшего сближения, через кратчайшее время указанное в строке “TCPA” значение 19:42 минуты, значение обведено зеленым прямоугольником. Таким образом дистанция и время кратчайшего сближения с целью меньше заданного в пунктах 12.2, 12.3. значит сигнализация сработала правильно 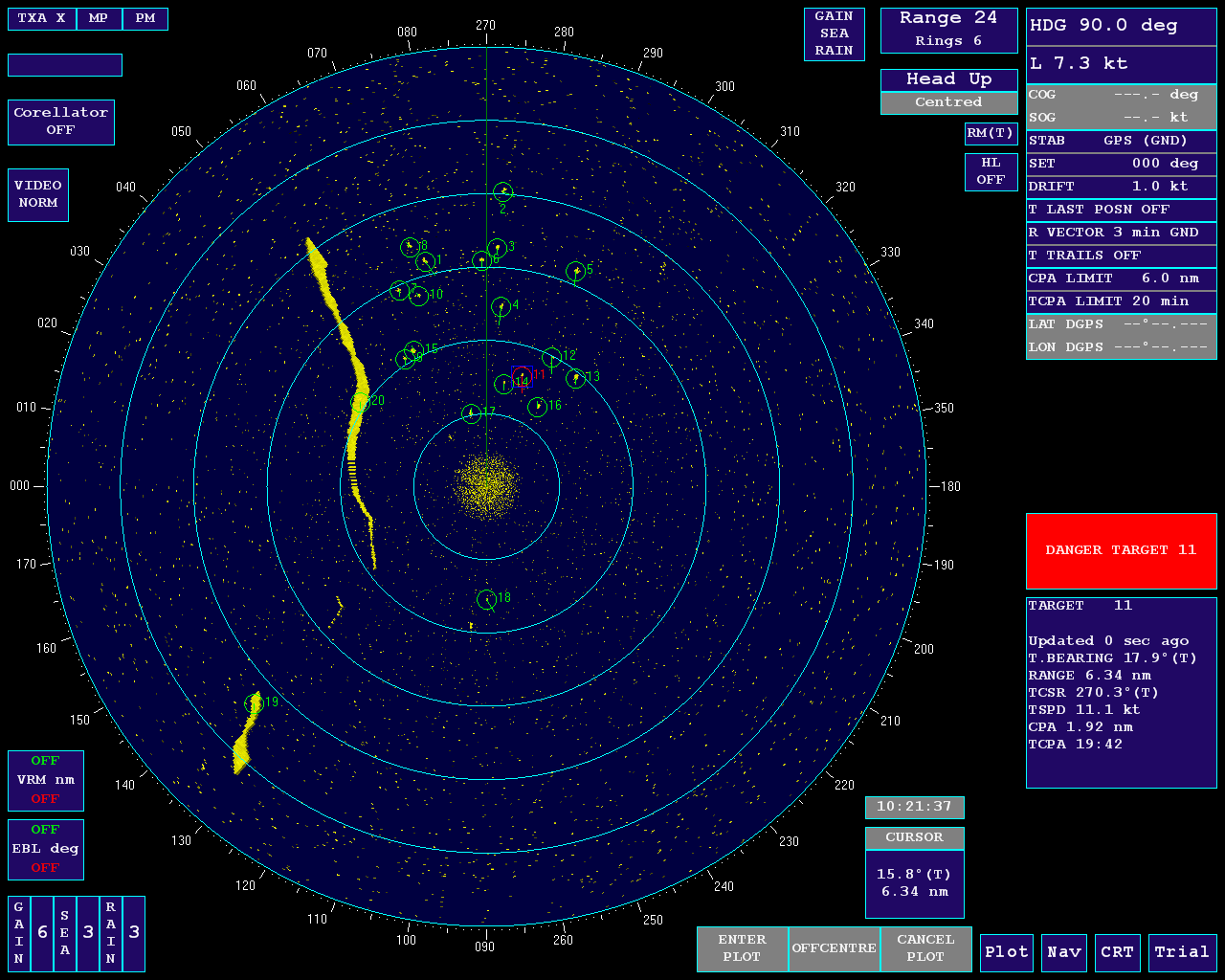 рис.2.4.61 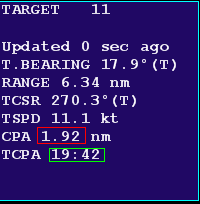 рис.2.4.62 12.6 Для выключения звуковой сигнализации надо навести курсор трекбола на окно предупреждения “DANGER TAGERT 11” и нажать ЛКТ. Звуковая сигнализация выключится окно предупреждения “DANGER TAGERT 11” перестанет отображаться, рис.2.4.63. Графическая сигнализация(красный кружок над целью 11) будет отображаться. 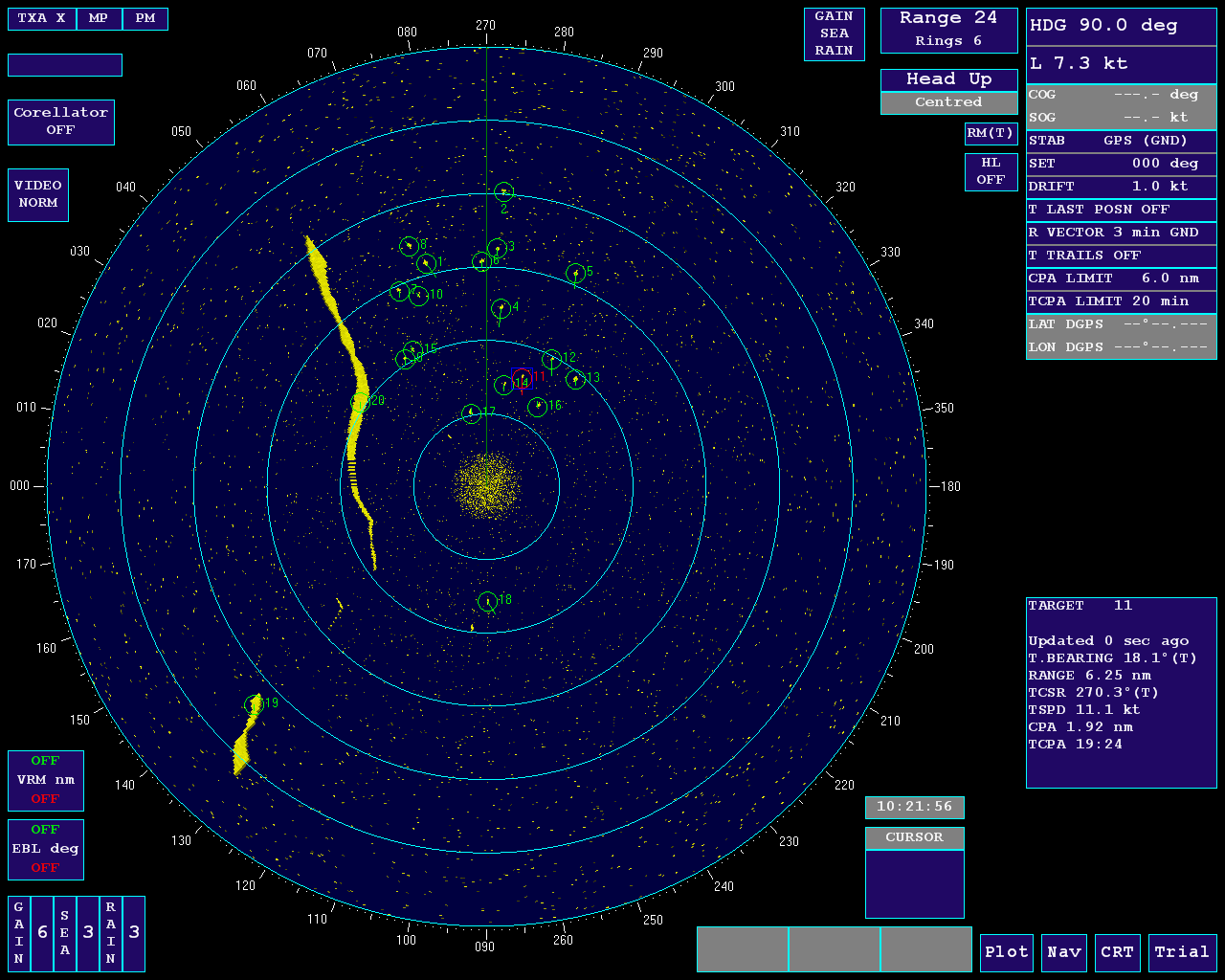 рис.2.4.63
13.1 Пример рассматривается с использованием ситуации “RLS3.tsk”, методика загрузки ситуации на исполнения в главе 2.7. Взять на сопровождение цели согласно рис.2.4.55. 13.2 Навести курсор трекбола на кнопку “Trial”, которая располагается в правой нижней части экрана ПО РЛС/САРП, рис.2.4.64, обведена красным прямоугольником нажать ЛКТ.  рис.2.4.64 13.3 На экране ПО РЛС/САРП справа от ИКО появится окно задание параметров имитации маневра, обведено зеленым прямоугольником, рис.2.4.65, а в ИКО появится символ собственного судна(крестик из линий белого цвета), которым проигрывается маневр, рис.2.4.66. 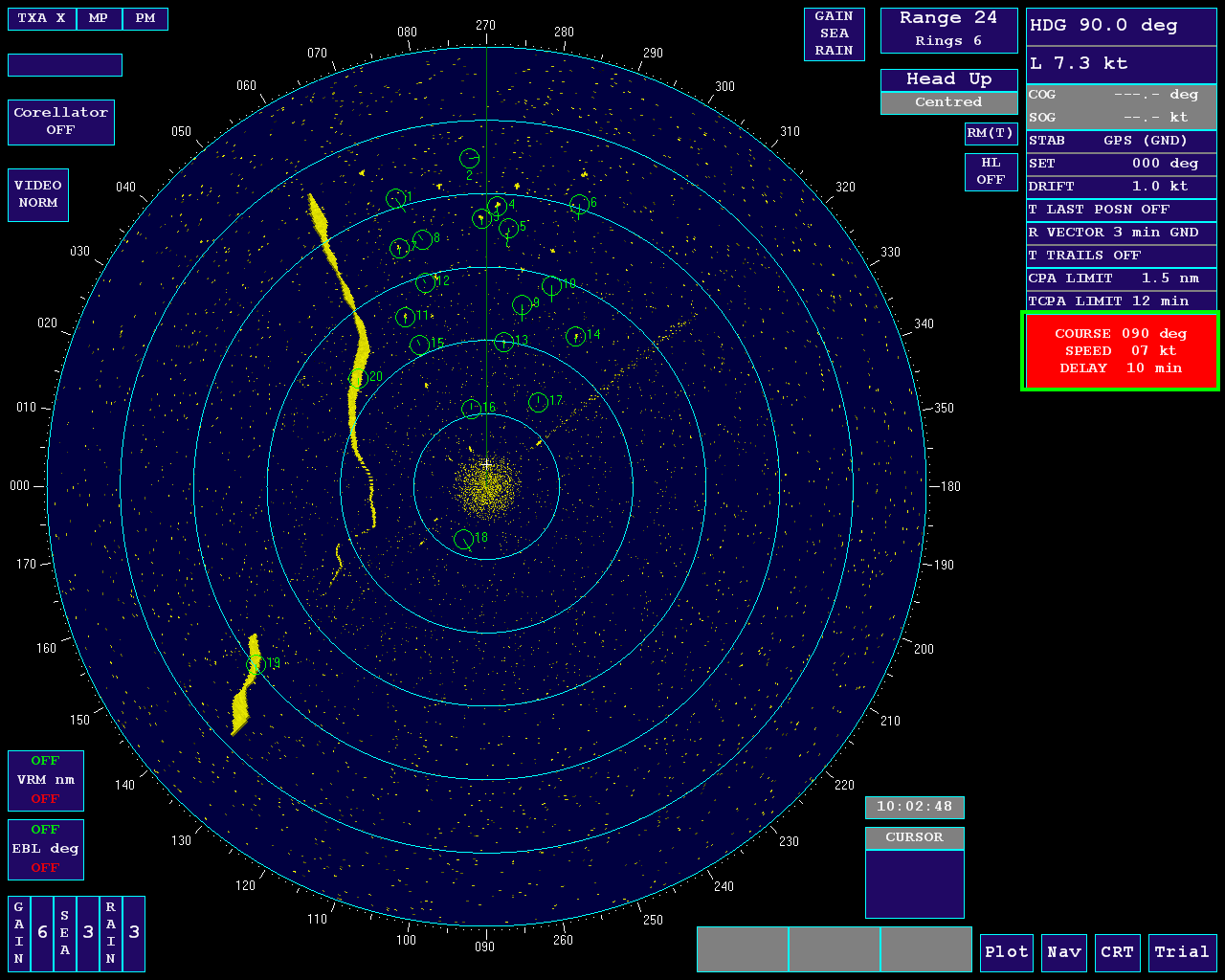 рис.2.4.65 рис.2.4.66 13.4 Упреждение времени маневра выставляется путем наведения курсора трекбола на окно задание параметров имитации маневра, нажатия ПКТ, удерживания ПКТ и перемещения курсора трекбола по вертикальной плоскости монитора, таким образом после нажатия ПКТ, перемещаем курсор трекбола вниз пока значение времени “DELAY” не будет равно 1 минуте рис.2.4.67. 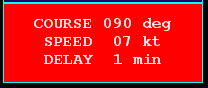 рис.2.4.67 13.5 Задание скорости маневра производится путем наведения курсора трекбола на окно задание параметров имитации маневра, нажатия ЦКТ, удерживания ЦКТ и перемещения курсора трекбола по вертикальной плоскости монитора, таким образом после нажатия ЦКТ, перемещаем курсор трекбола вверх пока значение скорости “SPEED” не будет равно 10 узлам рис.2.4.68. 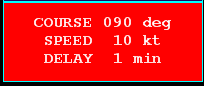 рис.2.4.68 13.6 Задание курса маневра производится путем наведения курсора трекбола на окно задание параметров имитации маневра, нажатия ЛКТ, удерживания ЛКТ и перемещения курсора трекбола по вертикальной плоскости монитора, таким образом после нажатия ЛКТ, перемещаем курсор трекбола вверх пока значение курса “COURSE” не будет равно 210 градусам рис.2.4.69. 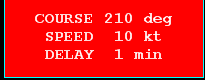 рис.2.4.69 13.7 В ИКО символ собственного судна, которым проигрывается маневр, сместится относительно настоящего местоположения судна(центр ИКО) на заданные значения в пунктах 13.4–13.6, все графические обозначения автосопровождения целей (кружки автосопровождения, вектора) будут отображаться относительно(с учетом собственного курса и скорости) совершенного маневра, рис.2.4.70. 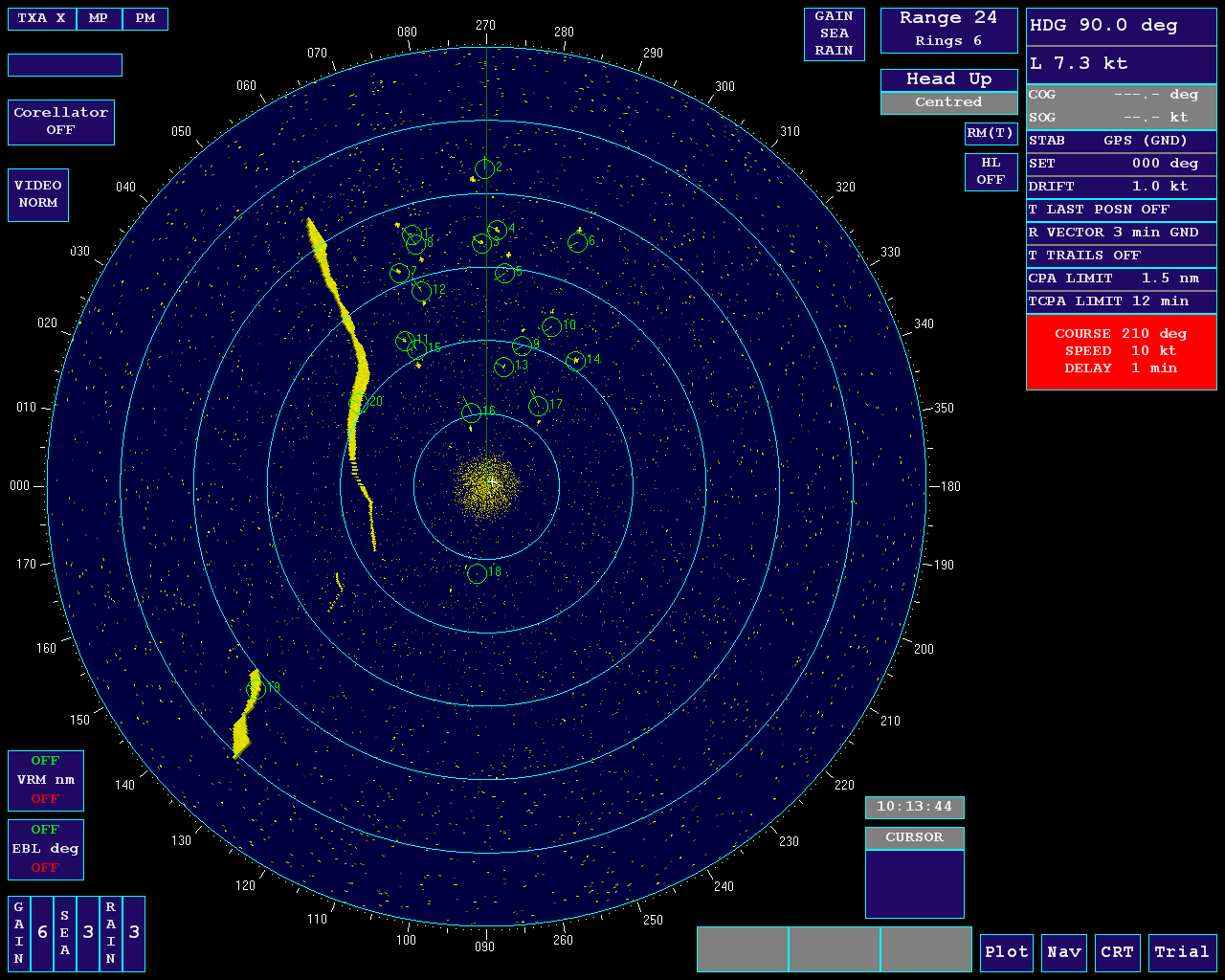 рис.2.4.70
14.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7. 14.2 Для включения функции отображения послесвечения эхосигнала надо нажать ЛКТ, когда курсор трекбола находится над окном изменения периода времени отображения послесвечения эхосигнала “Trails”, рис.2.4.71, окно обведено красным прямоугольником. После нажатия ЛКТ в окне “Trails”, вместо слова “OFF” , будет отображаться значения периода времени отображения послесвечения эхосигнала, значение времени 2 минуты, рис.2.4.72. 14.3 Для увеличения периода времени отображения послесвечения эхосигнала надо нажать ПКТ, когда курсор трекбола находится над окном изменения периода времени отображения послесвечения эхосигнала “Trails”. После нажатия ПКТ в окне “Trails”, вместо значения времени 2 минуты, будет отображаться значения времени 3 минуты. рис.2.4.73. 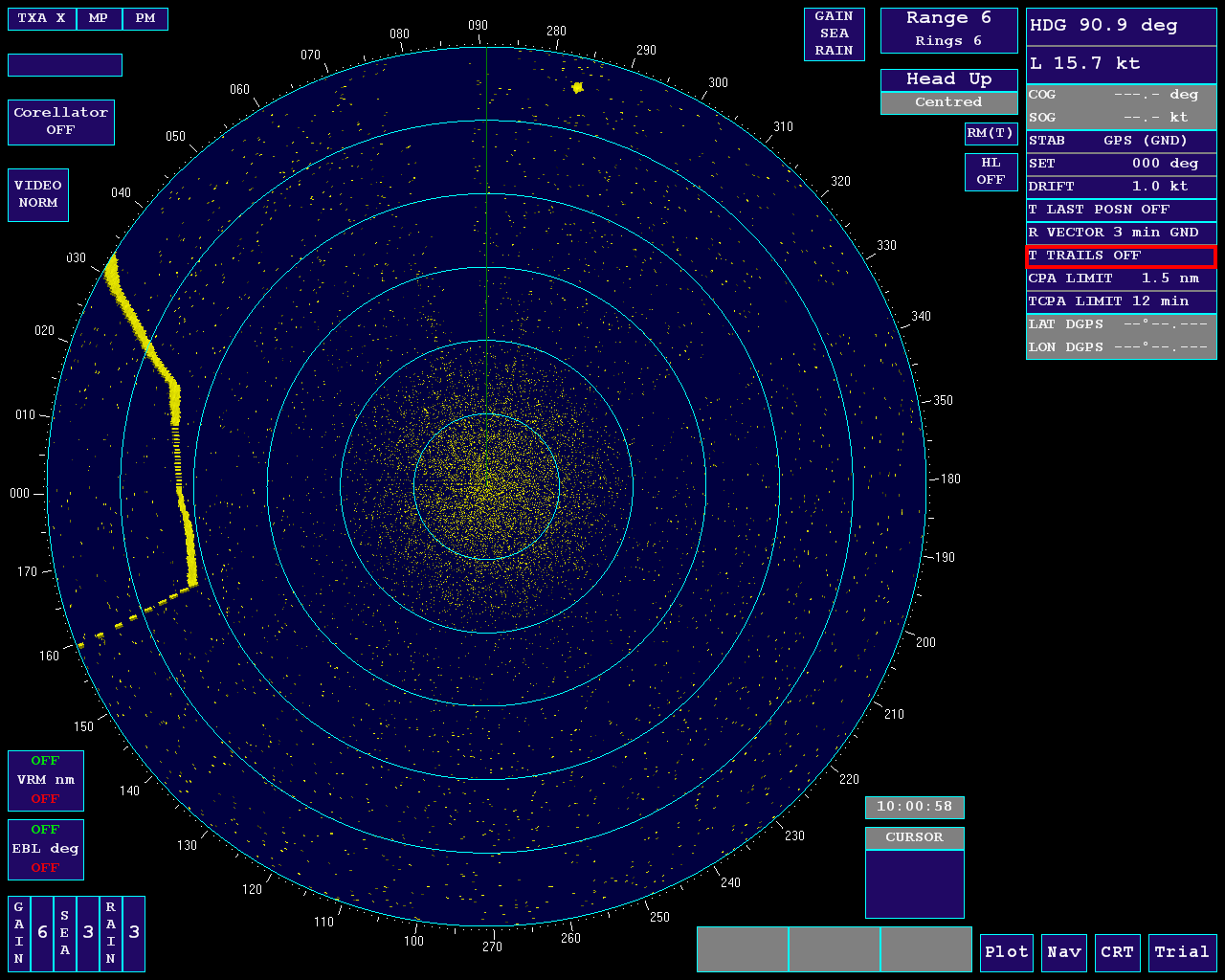 рис.2.4.71 рис.2.4.72 рис.2.4.73 14.4 Через три минуты работы функции накопления эхосигнала на ИКО будет отображаться следующая картина, рис.2.4.74. 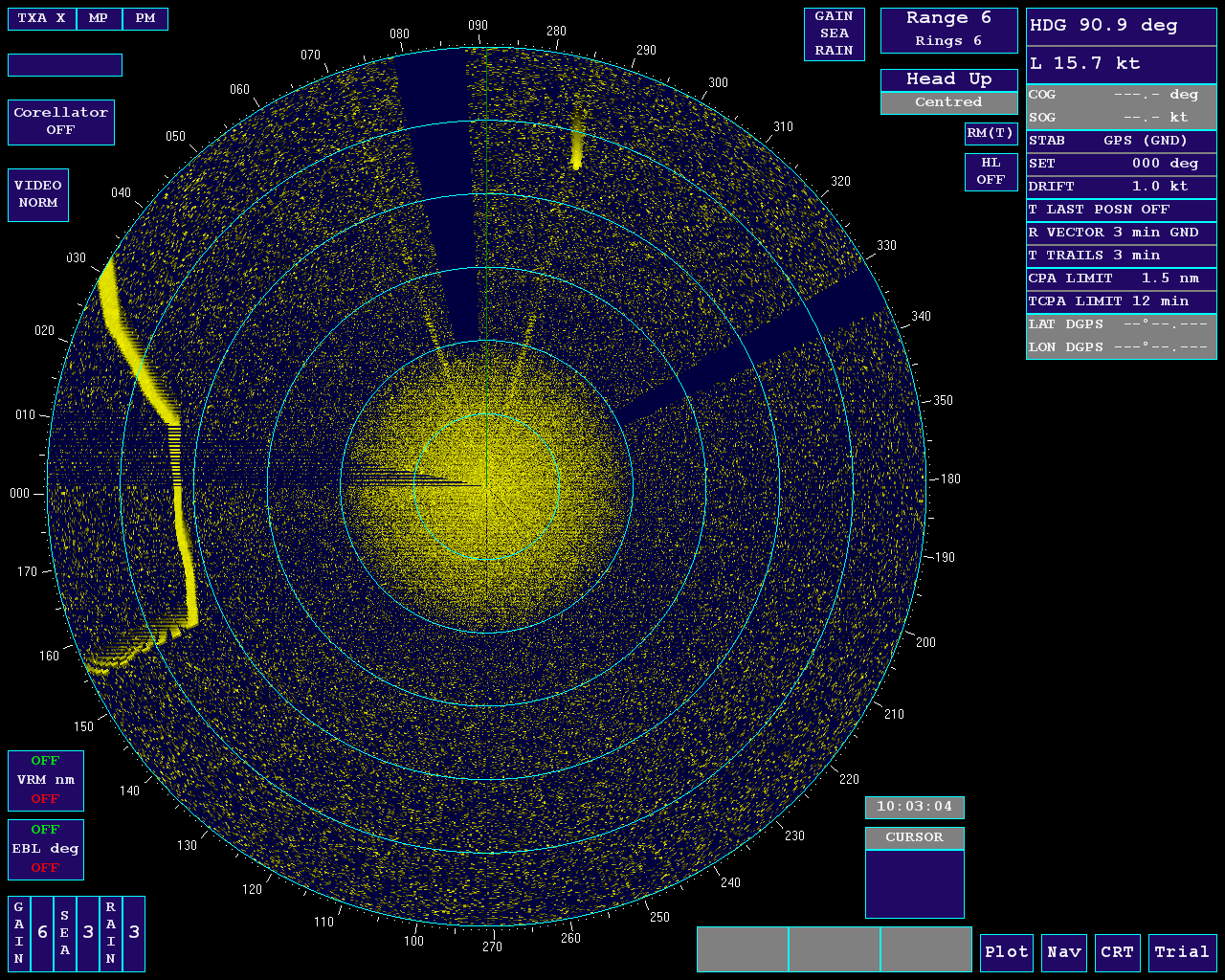 рис.2.4.74
 рис.2.4.75 2.4.2 Программное обеспечение РЛС/САРП Furuno 1. Графический индикатор кругового обзора (ИКО). Переключение шкал дальности. Неподвижные кольца дальности на ИКО. 1.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7. 1.2 На ФТ РЛС/САРП на экране монитора появится графическое отображение ПО РЛС/САРП типа Furuno (FR 1500), рис.2.4.76. 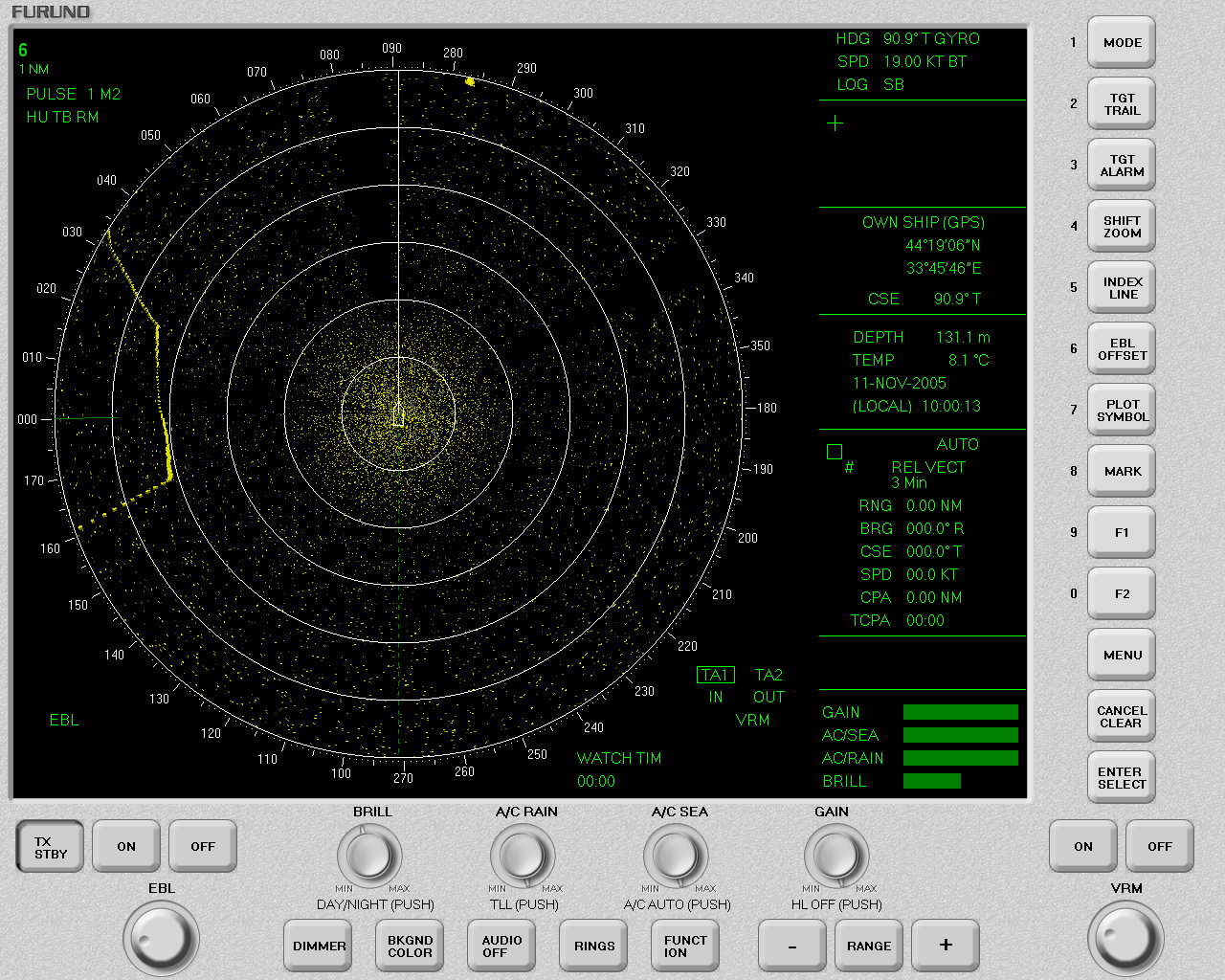 рис.2.4.76
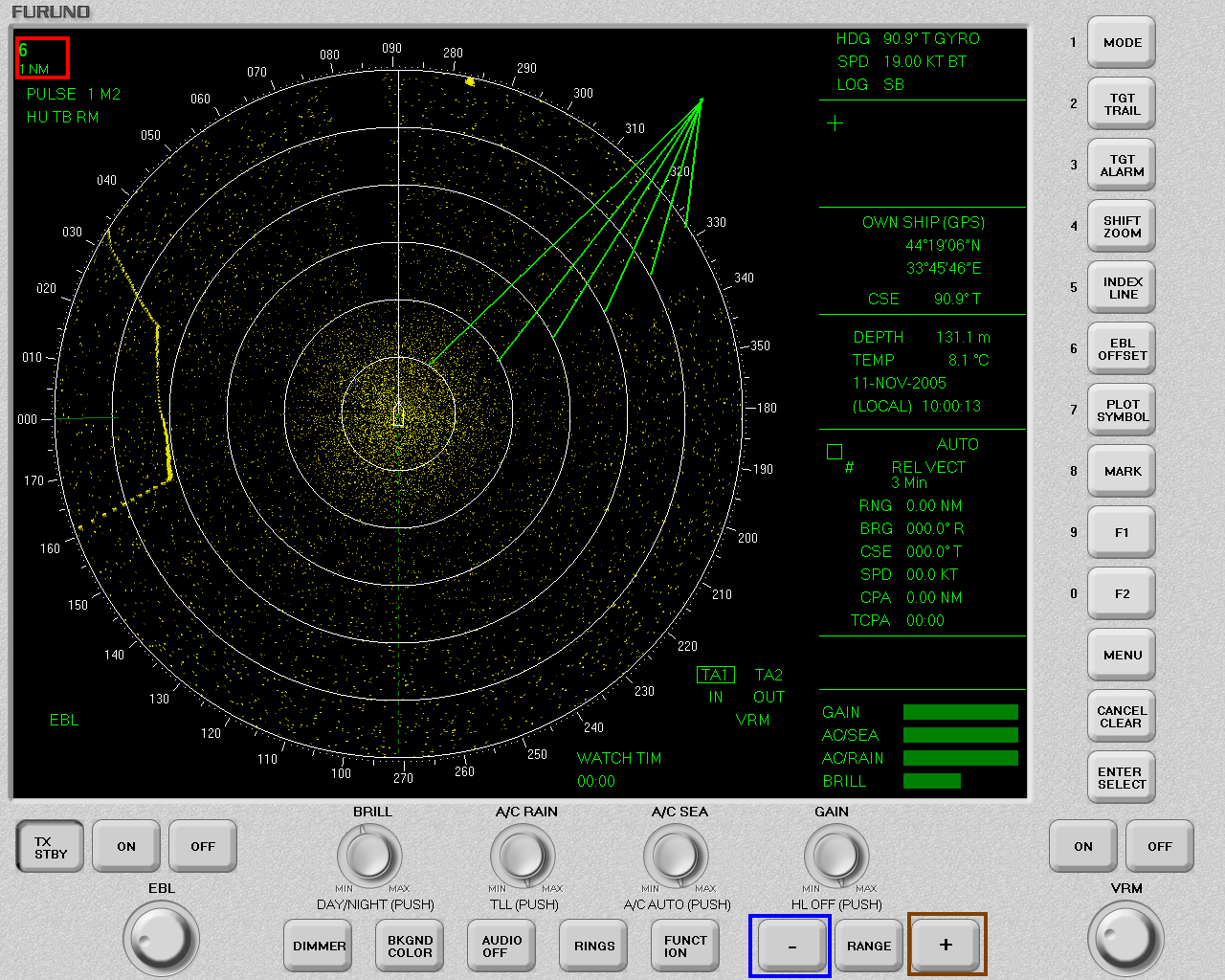 рис.2.4.77
 рис.2.4.78
 рис.2.4.79
2.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7. 2.2 Подвести курсор трекбола на кнопку 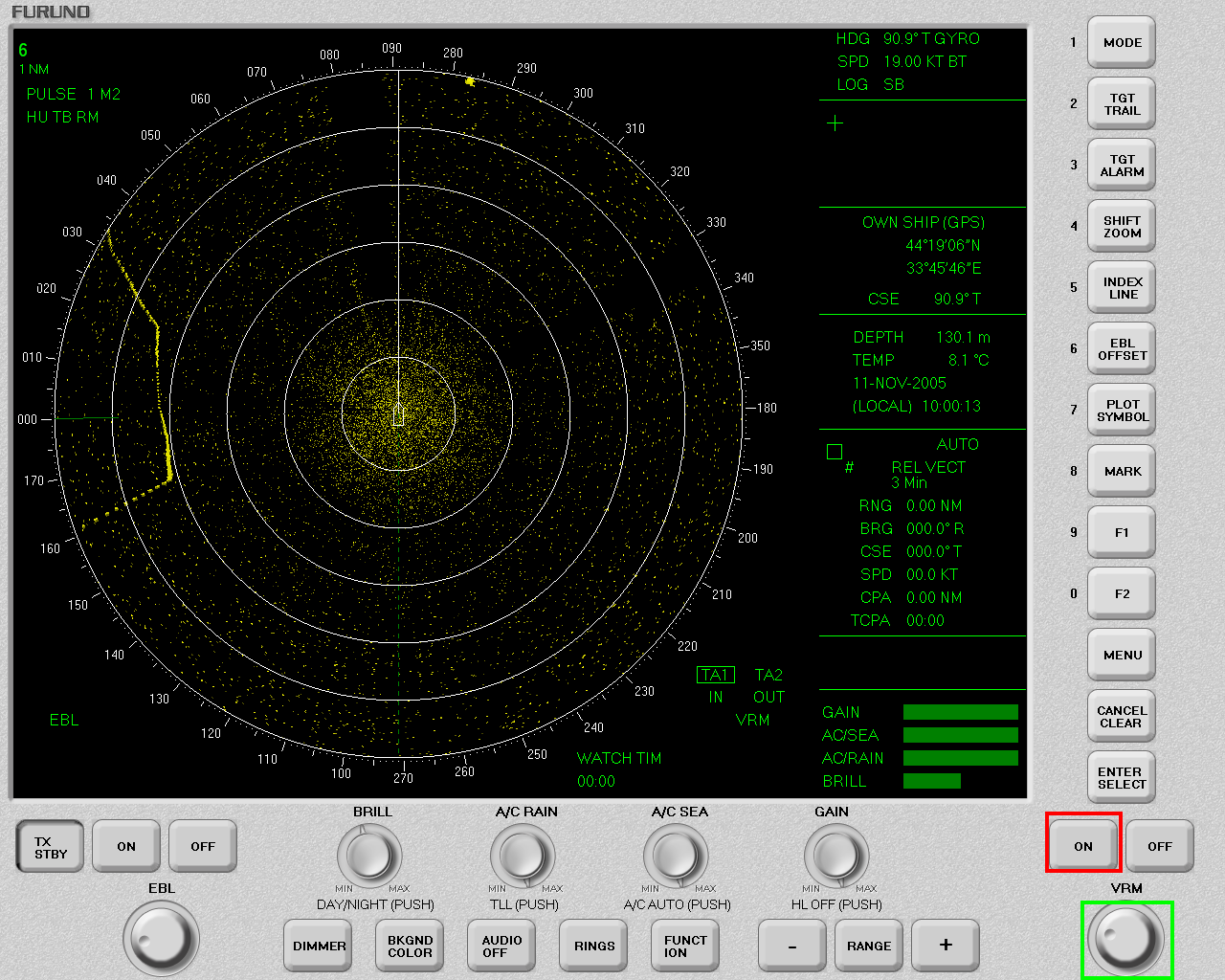 рис.2.4.80 2.3 На ИКО появится подвижные кольца дальности они отображается в виде круга синей пунктирной линией, рис.2.4.81, внутренние подвижное кольцо обозначено цифрой «1», внешнее — цифрой «2». Для изменение радиуса подвижного кольца дальности номер «1», надо подвести курсор трекбола на ручку “VRM”, рис.2.4.80, обведена зеленным прямоугольником, нажать ЛКТ и удерживая ЛКТ нажатой вращать против часовой стрелкой, радиус кольца уменьшается. Вращая ручку “VRM” подвижное кольцо дальности изменяет свой радиус, таким образом край кольца можно подвести к любому месту внутри ИКО и дальность от центра до края кольца будет отображаться в месте отображения информации “VRM”, рис.2.4.81, обведено красным прямоугольником, верхняя строка обведена зеленым прямоугольником обозначающим, что в данное время активно подвижное кольцо дальности номер «1», рис.2.4.82. Дальность измеряется в милях. 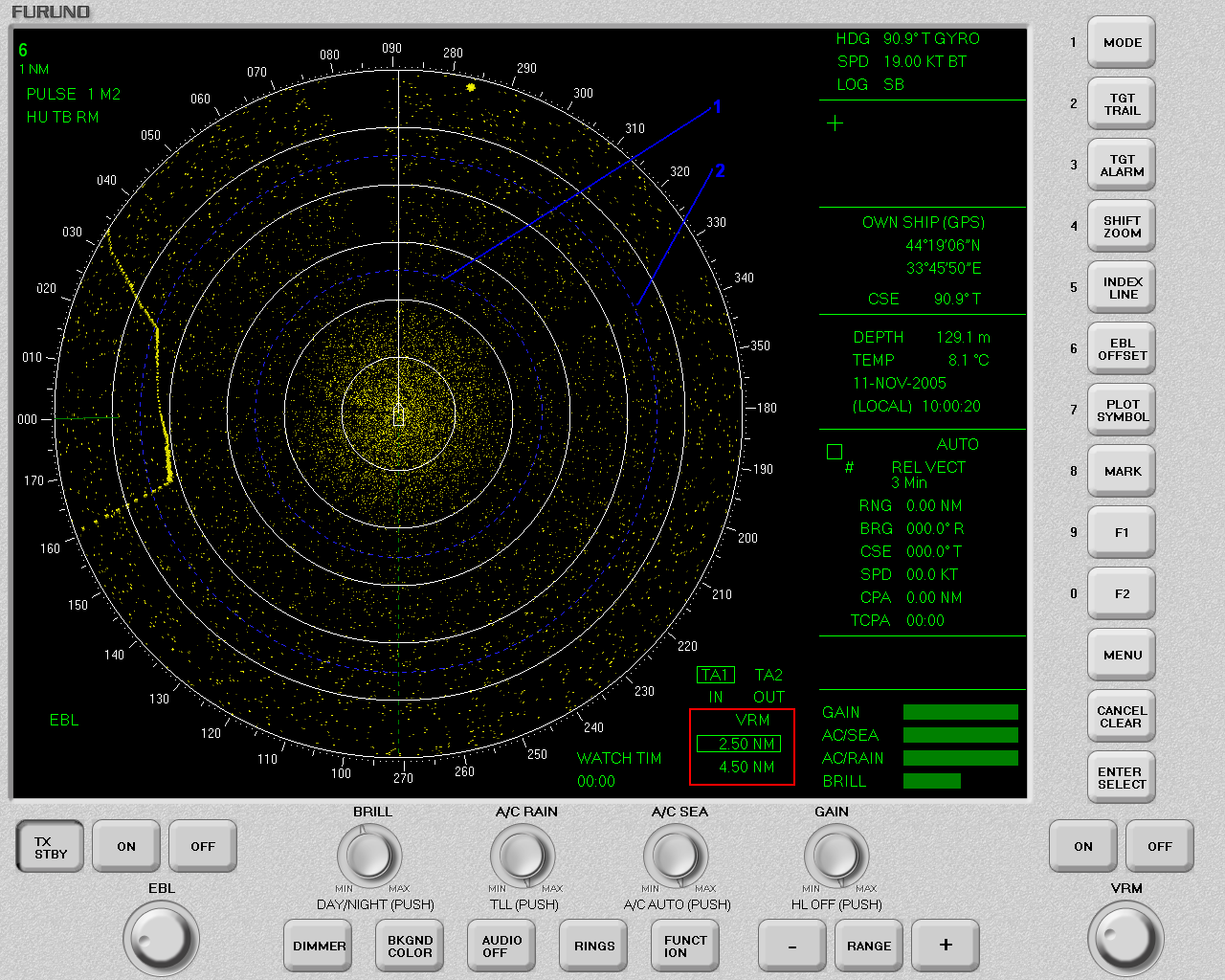 рис.2.4.81  рис.2.4.82 2.4 Для измерения дальности подвижным кольцом дальности номер «2», надо навести курсор трекбола на кнопку  рис.2.4.83 |