РПЗ (3). Силовые гиростабилизаторы 2 Индикаторносиловые гиростабилизаторы 3
 Скачать 0.65 Mb. Скачать 0.65 Mb.
|

Модель погрешностей гироскопаПри подаче на датчики моментов гироскопов управляющих сигналов, пропорциональных вычисленным в алгоритме угловым скоростям Каждая из компонент погрешности гироскопа в свою очередь может являться функцией и других параметров, например, - температуры окружающей среды, давления газового заполнения внутри гироскопа и т.п. В связи с тем, что мы рассматриваем ИНС для тяжелого самолета, ускорения которого составляют порядка (0,2-0,3)g, то влияние погрешностей гироскопа, зависящих от вторых степеней ускорения, малы и мы их в дальнейших расчетах не учитываем. При подаче управляющего сигнала на гироскоп, при недостаточно точной передаче сигналов и ошибок, возникающих в датчике момента гироскопа, возникает ошибка масштабного коэффициента. При подаче управляющих сигналов на другие гироскопы при неортогональности установки гироскопов также возникают ошибки. Как и в случае с акселерометром мы должны учитывать влияние различных воздействий на гироскоп. Для этого также введем такое понятие как случайная составляющая дрейфа гироскопа. Окончательное выражение модели погрешности, может быть представлено следующим образом: дрейф ошибка масштабного коэффициента неортогональность осей чувствительности ошибка дебаланса Расчет инерционных характеристикПредставим раму наружного крена, раму тангажа и раму внутреннего крена в виде полых цилиндров со следующими параметрами: Момент инерции относительно оси z считается по формуле Моменты инерции относительно осей x и y равны между собой и вычисляются по формуле Раму курса будем считать диском радиуса Для удобства обозначим: Рассчитаем эти моменты инерции. Рама наружного крена: Моменты инерции от Моменты инерции от Рама тангажа: Моменты инерции от Моменты инерции от Рама внутреннего крена: Моменты инерции от Моменты инерции от Рама курса: Моменты инерции от Рассчитаем момент инерции, вызванный приборами, установленными на платформе, а также момент инерции, вызванный гравиметром и противовесом, установленными на раме внутреннего крена. Расположение приборов на платформе (два гироскопа ГПА-Л2 и три акселерометра АЛ-1): 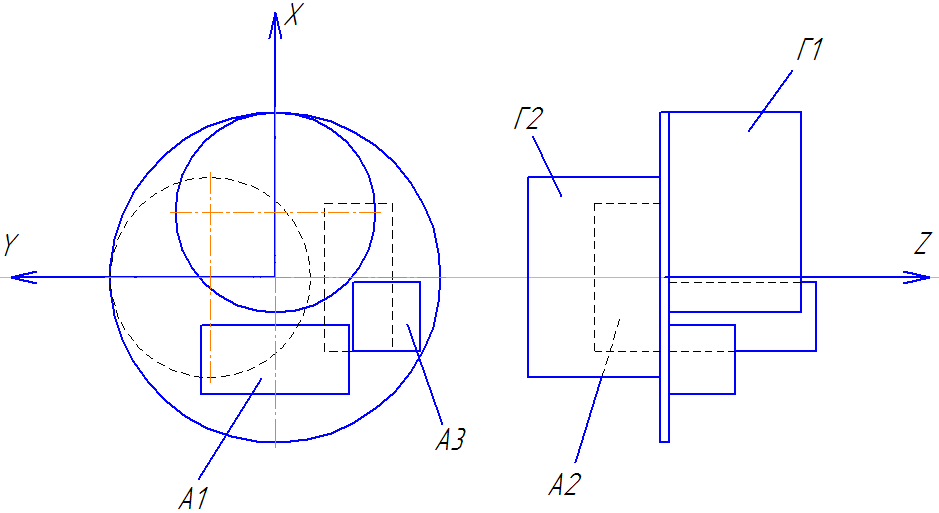
Координаты гравиметра: X=0, Y=0, Z=14 см. Координаты противовеса: X=0, Y=0, Z=-14 см. Полученные инерционные характеристики:
|