фывфыв. Техническое задание вариант 4 4 1 Структурный анализ механизма 6 2 Кинематический синтез механизма 11
 Скачать 0.63 Mb. Скачать 0.63 Mb.
|

4 Синтез кулачкового механизма4.1 Синтез структурной схемы механизмаПолагаем механизм плоским. Выделяем в нем звенья: кулачок-паз 1, профиль которого выполнен в виде паза «ПЗ» в диске «D»: толкатель 2 и стойку 0 (ноль). Для уменьшения потерь трения в контакте кулачкового пара ПЗ с толкателем и повышения их долговечности на толкателе устанавливаем ролик 3. Число подвижных звеньев в механизме n = 3. Число кинематических пар (КП): низших рH (А, В вида 1В, С-вида 1П), высших рв = 1 (Д': ролик 3 -паз кулачка). Число избыточных связей в механизме по формуле (1) при WM=0: q= Wo – 3n + 2РH +Pв= 1 – 3 • 3 + 2 • 3 + 1 = –1 < 0. Это соответствует наличию местной подвижности WM =1 – полезному вращению ролика 3 вокруг своей оси при его движении в кулачковом пазу. 4.2 Определение основных размеров механизма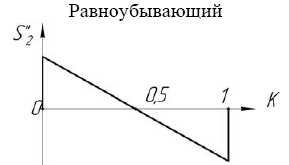 Рассчитываем линейные перемещения толкателя и функции скорости по формулам:  Задаем значения Ку,с для φу= 70 град, φс= 85 град, μS = μV =0,002 м/мм, результаты расчета сводим в табл. 4.1 и 4.2 Таблица 4.1
Таблица 4.1
4.3 Расчет масштабных коэффициентовУскорение ведомого звена вычерчивают в произвольном масштабе с учетом заданного закона ускорения для участка. Масштабный коэффициент угла поворота найдем по формуле
где μ – масштабный коэффициент, рад/мм; φУ – угол удаления, рад; φД – угол дальнего стояния, рад; φВ – угол возврата, рад; L– длина отрезка на чертеже, мм.  . .Длину отрезка ОР находим по формуле
где OP – длина отрезка OP на чертеже, мм; μ – масштабный коэффициент, рад/мм.  . .Разбиваем угол удаления и угол возврата на диаграмме на 6 равных частей. Масштабный коэффициент  . . 4.2. Построение диаграммы | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 ,
, ,
, .
. .
.
 .
. .
. аналогично пункту 2.2.
аналогично пункту 2.2. м/мм.
м/мм.  , , | (2.3) |
где rmin – минимальный теоретический радиус кулачка, м;
μS – масштабный коэффициент, м/мм;
r0 – минимальный радиус кулачка на чертеже, мм.
 м.
м.Построения кулачка ведем в масштабе
 м/мм. Проведём окружность радиусом BA, полученным в предыдущем пункте. В произвольном месте окружности ОВ0 выберем точку отсчета – т. В0. Соединим точку В0 с точкой О. От полученного луча в направлении (–ω) отложим угол φу, получим точку В12. Дугу В0В12 разделим на 12 равных частей (получим точки В1, В2, В3, …). Откладываем окружности, соответствующие перемещению толкателя в каждом из положений. Отмечаем точки пересечения отрезков ОВ0, ОВ1, ОВ2,… с соответствующими окружностями. Полученные точки соединяют плавной кривой – это теоретический профиль кулачка. Радиус ролика советуется выбирать в диапазоне
м/мм. Проведём окружность радиусом BA, полученным в предыдущем пункте. В произвольном месте окружности ОВ0 выберем точку отсчета – т. В0. Соединим точку В0 с точкой О. От полученного луча в направлении (–ω) отложим угол φу, получим точку В12. Дугу В0В12 разделим на 12 равных частей (получим точки В1, В2, В3, …). Откладываем окружности, соответствующие перемещению толкателя в каждом из положений. Отмечаем точки пересечения отрезков ОВ0, ОВ1, ОВ2,… с соответствующими окружностями. Полученные точки соединяют плавной кривой – это теоретический профиль кулачка. Радиус ролика советуется выбирать в диапазонеРадиус ролика советуется выбирать в диапазоне
 , , | (4.4) |
где rрол – радиус ролика толкателя, м;
rmin – принятый минимальный теоретический радиус кулачка, м.
 .
.Принимаю радиус ролика равным rрол = 0,02 м= 20 мм. Тогда радиус ролика на чертеже будет равен
 мм
ммСписок использованных истчоников
1. К.В. Фролов, С.А. Попов, А.К. Мусатов и др. Теория механизмов и механика машин. - М.: Высш. шк., 2005. - 496 с.
2. С.А. Попов, Г.А. Тимофеев. Курсовое проектирование по теории механизмов и механике машин. – М.: Высш. шк., 2002. 411с.
3. С.И. Марченко, Е.П. Марченко, Н.В.Логинова. Теория механизмов и машин.- Ростов н/Д.; Феникс, 2003.- 263 с.
4. Теория механизмов и машин, изд. 3 переработанное и дополненное, под ред. И.И.Артоболевский. Изд. «Наука» главная редакция физико-математической литературы. М.: 1975 г.









Разраб.
Пров.
Н. контр.
Утв.

Лит.
A
Лист
2
Листов
Изм
Лист
№ докум.
Подп.
Дата



.