ilovepdf_Роман. Теориямеханизмов
 Скачать 1.02 Mb. Скачать 1.02 Mb.
|

|
Министерство науки и высшего образования Российской Федерации Федеральное государственное бюджетное образовательное учреждение ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТИНСТИТУТ АВИАМАШИНОСТРОЕНИЯ И ТРАНСПОРТА Кафедраконструированияистандартизациивмашиностроении наименование кафедры Допускаю к защите Руководитель Кузнецов Н. К. ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К КОНТРОЛЬНОЙ РАБОТЕ ПО ДИСЦИПЛИНЕ Теориямеханизмовимашин Выполнил студент группы: НДДбз 17-1 Щвецов Р.А. Нормоконтролер Кузнецов Н. К. Контрольная работа защищена с оценкой Иркутск 2020 г. Оглавление Введение 3 Задание 4 Структурный анализ рычажного механизма 5 Описание механизма 5 Степень подвижности механизма 6 Структурные группы механизма 7 Кинематический анализ механизма 9 Определение размеров звеньев механизма 9 Построение кинематической схемы механизма 9 Построение планов скоростей механизма 10 Построение планов ускорeний механизма 12 Построение кинематических диаграмм 15 Построение диаграммы перемещения 15 Построение диаграммы скоростей 16 Построение диаграммы ускорений 17 Определение погрешности двух методов нахождения скоростей и ускорений 18 Силовой анализ механизма 20 Определение сил тяжести звеньев 20 Определение сил инерции звеньев 20 Определение реакций в структурной группе 2-3 21 Силовой расчет ведущего звена 1 24 Рычаг Жуковского 25 Сравнение значений уравновешивающей силы 27 Заключение 28 Список использованной литературы 29 ВведениеКурсовой проект по дисциплине «Теория механизмов и машни» предусматривает исследование механизма по трем основным разделам: структурный анализ кинематический анализ кинетостатический анализ Результатом структурного анализа является определение его класса, по которому в дальнейшем можно выбрать методы его последующих исследований. Помимо того, также определим класс кинематических пар в составе механизма и его подвижность. Кинематический анализ предусматривает расчет кинематических характеристик. В данном разделе строятся положения механизма в различные моменты времени, рассчитываются скорости, ускорения, перемещения точек и звеньев. Расчеты ведутся методом планов (т.е. решение уравнений векторным способом) и методом кинематических диаграмм. Силовое исследование механизма основывается на принципе Д’ Аламбера. При котором к статически определяемой структурной группе помимо действующих внешних сил добавляют силы инерции и рассматривают эту группу Ассура, как находящуюся в равновесии. Кинетостатический расчет проводится методом планов сил, а в качестве результата определяется уравновешивающий момент на ведущем звене механизма. Задание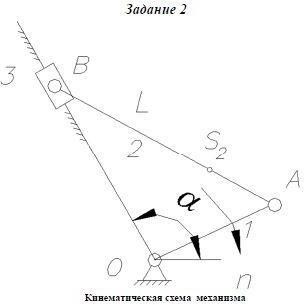 Рис. 0.1 Задание Кинематическая схема рычажного механизма представлена на Рис. 0.1. Табл. 0.1. Размеры звеньев
Структурный анализ рычажного механизмаОписание механизмаКинематическая схема механизма представлена на Рис. 1.1. На схеме обозначено: 1 – кривошип , 2 – шатун, 3 - ползун, 0 – неподвижное звено механизма стойка). Стрелкой показано направление угловой скорости ω1. 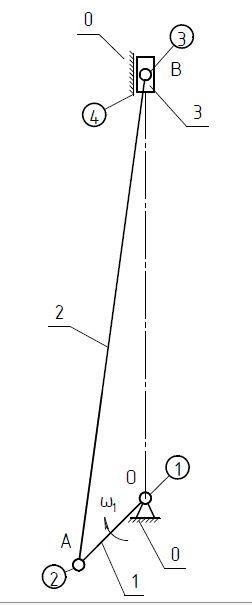 Рис. 1.1 Схема механизма Механизм представляет собой 4-хзвенный плоский рычажный механизм. Кинематическая схема механизма показана на Рис. 1.1: звено 1 –кривошип равномерно вращается вокруг неподвижной оси Oz (Рис. 1.1.); звено 2 – шатун совершает плоскопараллельное движение; звено 3 – ползун, совершает возвратно-поступательное движение; звено 0 – стойка неподвижна (неподвижный шарнир O; неподвижные направляющие ползуна 3). КИНЕМАТИЧЕСКИЕ ПАРЫ – подвижные соединения двух звеньев, обозначены на схеме (Рис. 1.1) заглавными латинскими буквами с индексами, в которых цифра указывает подвижность КП, буква (русская) – вид относительного движения (в -вращательное, п - поступательное). Табл. 1.1
Все четыре пары обеспечивают контакт по поверхности и поэтому относятся к низшим парам. По числу связей в КП имеем кинематических пар V класса p5= 4, кинематических пар IV класса p4= 0. Степень подвижности механизмаСтепень подвижности механизма W определяется по формуле Чебышева:
где n – число подвижных звеньев, p5– число кинематических пар V класса, p4–число кинематических пар IV класса. В данном механизме в результате проведенного выше исследования получено n =3; p5= 4; p4= 0. Степень подвижности данного механизма по формуле (1) W =3×3 −2× 4-0 =1, т.е. механизм имеет одно начальное звено. Структурные группы механизмаРычажный механизм состоит из первичного механизма 1-го класса и двухповодковых групп (диад и групп 2-го класса). Структурный анализ начинают с групп наиболее удаленных от первичного механизма. 1. Группа Ассура 2–3– шатун 2 и ползун 3 (Рис. 1.2) – представляют собой двухповодковую группу или диаду второго вида, с двумя вращательными парами B1В и A1В и одной поступательной B1П . Число подвижных звеньев в группе n =2. Число кинематических пар в группе p5=3;. p4=0. Степень подвижности диады W23 = 3×2 − 2×3−0=>W23= 0 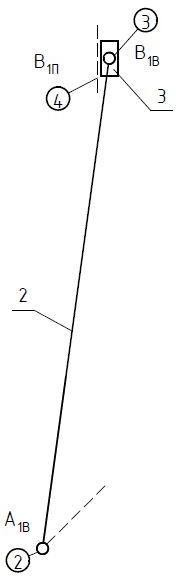 Рис. 1.2 Структурная группа Ассура 2-3 3. Первичный механизм (Рис. 1.3) – звено 1 (кривошип OA), соединенное шарниром A и со стойкой 0. Число подвижных звеньев n =1. Число кинематических пар p5=1, p4=0. Степень подвижности механизма 1-го класса W1= 3×1 − 2×1−0=>W1=1 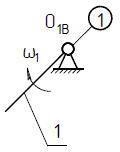 Рис. 1.3 Начальное звено Механизм состоит из механизма первого класса и двух групп Ассура второго класса 2-го порядка. Следовательно, в целом механизм относится к механизму второго класса. Кинематический анализ механизмаОпределение размеров звеньев механизмаДлина кривошипа OA будет равна:  S lOA= 2 = S lOA= 2 =0,098  2 =0,049 м 2 =0,049 мДлина шатуна 2 будет равна:  l = lOA = 0,049 =0,257 м AB λ 0,191 Положение центра масс звеньа 2: lAS2=0,35∙lAB=0,35∙0,257=0,09 м Построение кинематической схемы механизмаВыбираем масштаб длин µl. Пусть радиусу кривошипа lOA=0,049 м соответствует на чертеже отрезок OA= 32,67 мм. Тогда масштаб построения будет равен: µ = lOA⁄ = 0,049 = 0,0015 м⁄мм l OA ⁄32,67 Вычисляем чертежные размеры. Длина шатуна 2: AB= lAB⁄ = 0,257 =171,33 мм µl ⁄0,0015 Расстояние до центров масс звеньев: AS = lAS2⁄ 2 µl = 0,09 =60 мм ⁄0,0015 Механизм строим методом засечек. Строим неподвижный шарнир O. Под углом 900 проводим направляющую ползуна 3. Рисуем окружность радиуса OA равным 32,67 мм. За начальное положение примем крайнее нижнее положение ползуна 3. Размечаем эту окружность на 8 равных частей по ходу угловой скорости. Получаем точки A в 8 положениях. Рисуем окружность с центром в точке A и радиусом AB равным 171,33 мм. Ищем пересечение окружности с неподвижной направляющей ползуна 3. Точка пересечения и будет искомой точкой B. Делаем аналогичные построения для 8-ми положений. На расстоянии 41,33 мм отмечаем положение центра масс шатуна 2. На этом построение плана положений окончено. Построение планов скоростей механизмаПостроение плана скоростей проведем для положения 1 Угловая скорость начального звена равна:  ω1 = ω1 =2∙π∙n1 60 2∙π∙2200  = 60 =230,38 рад⁄с = 60 =230,38 рад⁄сСкорость точки A начального звена равна: vA=ω1∙lOA =230,38∙0,049=11,29 м⁄с вектор скорости направлен перпендикулярно звену 1 в сторону, соответствующую направлению угловой скорости ω1. На плане скоростей скорость точки A, принадлежащей звену 1, изображается отрезком pva. Выбираем длину отрезка pva равной 75,26 мм. Тогда масштабный коэффициент плана скоростей будет равен: µ = vA = 11,29 =0,15 мс-1⁄ммv pva 75,26 Из произвольной точки pv на плоскости проводим отрезок pva в масштабе плана скоростей µv. Этот отрезок изображает скорость точки A. Определим скорость точки B, принадлежащей одновременно звеньям   2 и 3. Звено 3 совершает возвратно-поступательное движение вдоль неподвижной направляющей. Мы знаем направление скорости точки B по направлению. Звено 2 совершает сложное плоскопараллельное движение. В сложном движении скорость точки B определим в соответствии с векторным уравнением: 2 и 3. Звено 3 совершает возвратно-поступательное движение вдоль неподвижной направляющей. Мы знаем направление скорости точки B по направлению. Звено 2 совершает сложное плоскопараллельное движение. В сложном движении скорость точки B определим в соответствии с векторным уравнением:
где vB - вектор скорости точки B; vA- вектор скорости точки A; vBA - вектор скорости точки B относительно A. В векторном уравнении (2) скорость точки A известна по величине и направлению, скорости vB и vBA известны только по направлению. Скорость точки B направлена вдоль линии неподвижной направляющей (возвратно- поступательное движение звена 3), вектор скорости точки B относительно точки A будет направлен перпендикулярно отрезку AB как к радиусу окружности описываемой точки B в ее относительном движении вокруг точкиA. В соответствии с этим из точки pv проводим луч, параллельный линии неподвижной направляющей, а из точки a отрезка pva луч, перпендикулярный AB. Пересечение этих лучей в точке b определяет отрезок pvb, который в принятом масштабе изображает скорость точки B, а отрезок ab изображает скорость точки B относительно точки A. Измеряем на чертеже размеры отрезков pvb и ab и определяем скорости:
Положение центров масс звеньев S2, S3 на плане скоростей определяем также из теоремы подобия: их расположение на плане скоростей подобно v v расположению на схеме механизма. Находим отрезки p s , p s и откладываем 2 3 их на плане скоростей. Величины скоростей центров масс будут равны:
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||