Мех_нефиз_240_24.10.2011. Мех_нефиз_240_24.10. Учебнометодический комплекс по дисциплине для нефизических специальностей Лабораторный практикум Абакан 2011 ббк 22. 2я73
 Скачать 1.9 Mb. Скачать 1.9 Mb.
|

Контрольные вопросы
ЦИКЛ 3. ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ. МЕХАНИЧЕСКИЕ КОЛЕБАНИЯ И ВОЛНЫ Лабораторная работа 9 ИЗУЧЕНИЕ ОСНОВНОГО УРАВНЕНИЯ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ПОМОЩЬЮ МАЯТНИКА ОБЕРБЕКА Цели работы: проверить зависимость углового ускорения от момента силы при постоянном моменте инерции и представить эту зависимость графически; определить момент инерции маятника Обербека. Приборы и принадлежности: маятник Обербека, штангенциркуль, секундомер, набор грузов, технические весы с разновесом. Библиографический список: [1] § 16–19; [2] ч.1 § 21–23; [3] т.1 § 38–39, § 41; [4] т.1 § 10 - 11; [5] § 2.10, § 5.1, § 5.3–5.4; § 5.11; [7] § 1.3.3. Введение В Рис. 9.1. ращательным движением абсолютно твердого тела называется движение, при котором все точки тела описывают окружности, лежащие в параллельных плоскостях, с центром, расположенным на прямой, называемой осью вращения. Д  ля описания вращательного движения вводят следующие величины: момент силы, момент инерции, момент импульса. Моментом силы относительно неподвижной точки О (рис. 9.1) называется векторная величина ля описания вращательного движения вводят следующие величины: момент силы, момент инерции, момент импульса. Моментом силы относительно неподвижной точки О (рис. 9.1) называется векторная величина Модуль вектора где α – угол между направлениями векторов Моментом инерции I материальной точки относительно оси вращения называется физическая величина, равная произведению массы m точки на квадрат ее расстояния r до оси вращения: I = m·r2. (9.3) Моментом инерции тела относительно неподвижной оси вращения называется сумма моментов инерции всех материальных точек, составляющих тело: Момент инерции характеризует инертные свойства вращающегося тела и зависит от распределения массы в теле, расположения оси вращения, формы тела. Моментом импульса материальной точки относительно неподвижной точки О называется векторная величина Учитывая, что импульс материальной точки равен где ω – угловая скорость материальной точки. Основное уравнение динамики вращательного движения (или второй закон Ньютона для вращательного движения) в дифференциальной форме имеет вид: здесь Если момент инерции тела относительно фиксированной оси вращения остается величиной постоянной, то уравнение (9.7) можно записать в виде: где Мz – проекция вектора Описание экспериментальной установки В лабораторной работе проверяется справедливость основного уравнения динамики вращательного движения с помощью маятника Обербека. М 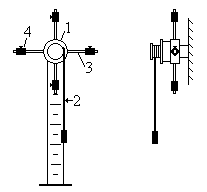 аятник Обербека состоит (рис. 9.2) из ступенчатого шкива 1, укрепленного в центре крестовины. Крестовина со шкалой надета на ось. На одну из ступеней шкива наматывается нить 2, к концу которой можно подвесить груз массой m. аятник Обербека состоит (рис. 9.2) из ступенчатого шкива 1, укрепленного в центре крестовины. Крестовина со шкалой надета на ось. На одну из ступеней шкива наматывается нить 2, к концу которой можно подвесить груз массой m.Н Рис. 9.2. Маятник Обербека а концах крестовины находятся грузы m*. Их можно перемещать вдоль стержней 3 крестовины и закреплять на любом расстоянии от оси вращения с помощью винтов 4. При определенном расположении грузов m* на стержнях центр тяжести маятника совпадает с осью вращения (маятник будет в безразличном равновесии). Таких состояний множество (если грузы на стержнях имеют одинаковую массу, то для безразличного равновесия маятника достаточно расположить эти грузы симметрично относительно оси вращения). Изменяя положение грузов m*, можно изменять момент инерции маятника. Маятник, находящийся в безразличном состоянии, приводится во вращение грузом m. Для такого маятника: Мz = Мнат – Мтр , (9.9) где Мнат – момент силы натяжения нити, Мтр – момент силы трения в оси маятника (его можно считать постоянным при вращении маятника в одну и ту же сторону). Из (9.8) и (9.9) для маятника Обербека имеем: Угловое ускорение ε маятника и момент силы натяжения нити Мнат равны: здесь h – высота падения груза за время t,D – диаметр шкива, а – линейное ускорение падения груза. При а<<g формула (9.12) упрощается: Момент силы трения Мтр в работе определяется с помощью графика зависимости ε = f(Мнат). В лабораторной работе проверяется справедливость уравнения (9.10). Формула (9.10) является линейной зависимостью между ε и Мнат, а ее график – прямой. Следовательно, если график, построенный по результатам измерений в координатах ε и Мнат, можно представить в виде прямой, то для маятника Обербека справедливо основное уравнение динамики вращательного движения и можно вычислить его момент инерции Iz. Измерения и обработка результатовУпражнение 1. Проверка зависимости углового ускорения маятника от момента силы при постоянном моменте инерции.
Таблица 9.1
Упражнение 2. Определение момента инерции маятника Обербека.
Контрольные вопросы
Лабораторная работа 10 ИЗУЧЕНИЕ СВОБОДНЫХ КОЛЕБАНИЙ ПРУЖИННОГО МАЯТНИКА Цель работы: ознакомление с характером свободных колебаний и определение их характеристик. Приборы и принадлежности: пружинный маятник, секундомер. Библиографический список: [1] § 140–142; [2] ч.1 § 27; [3] т.1 § 49, § 53–54; [4] т.1 § 50 - 51; [5] § 10.1–10.2; [7] § 3.1.1, § 3.2.1; [8] § 59–60, § 21. Введение Колебаниями называют движения или изменение состояния системы, отличающиеся той или иной повторяемостью во времени. Колебательные процессы могут существовать в объектах различной природы, в том числе в живых организмах, а также в системах различных размеров – от космических до молекулярных. Колебания, при которых состояния системы повторяются через равные промежутки времени называют периодическими. Строго периодическими являются гармонические колебания, где изменение состояния системы со временем описывается при помощи периодической функции синуса (или косинуса). Для этих колебаний имеют определенный смысл и значения величины: амплитуда, период, частота, циклическая частота. Период колебаний Т – это наименьший промежуток времени, через который повторяются определенные состояния системы. Или это время одного полного колебания. Единицы измерения [Т] = 1 с. Частота ν – число колебаний в единицу времени (секунду). Единицы измерения [ν] = 1 Гц. Циклическая (круговая) частота ω – число колебаний за 2π секунды. Единицы измерения [ω] = 1 с-1. Амплитуда Xm– наибольшее отклонение колеблющейся величины от состояния равновесия. Единицы измерения [Xm] = 1 м. Существует классификация колебаний:
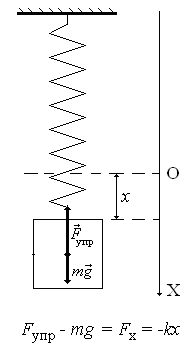
В Рис. 10.1. Пружинный маятник настоящей лабораторной работе изучаются свободные механические колебания на примере пружинного маятника. Пружинный маятник – это груз массой m, подвешенный на упругой пружине жесткостью k (рис. 10.1). Если груз сместить из положения равновесия на отрезок х и предоставить самому себе, то пружинный маятник начнет колебаться. Это свободное колебание. При отсутствии сопротивления среды колебания будут незатухающими, при наличии сопротивления – колебания – затухающие. Незатухающие свободные колебания пружинного маятника совершаются только под действием упругой силы (трение отсутствует). Ее проекция на ось Х по закону Гука (рис. 10.1): Fx = – kx. (10.1) Тогда основное уравнение движения маятника (второй закон Ньютона) в проекциях на ось X имеет вид: Fx = max или где Уравнение (10.2) является дифференциальным уравнением, которое принято записывать в стандартной форме: здесь Решением уравнения (10.3) является уравнение гармонических колебаний: x = Xmcos(ω0t + φ0), (10.4) где x – смещение маятника в момент времениt,ω0t + φ0 = φ – фаза колебаний в тот же момент времени,φ0 – начальная фаза колебаний. Период собственных колебаний пружинного маятника будет равен: Затухающие свободные колебания пружинного маятника совершаются под действием двух сил: упругой силы пружины Fx = – kx и силы сопротивления среды (направленной противоположно скорости): где r – коэффициент сопротивления, который зависит от свойств среды (вязкости), а также от размеров и формы груза и пружины; Теперь основное уравнение движения маятника (уравнение затухающих колебаний) в проекциях на ось X имеет вид: Если силы сопротивления не велики и r/m<< ω0, колебания маятника будут слабо затухающими и решение уравнения (10.7) будет иметь вид: – это уравнение (закон) затухающих колебаний. Выражение: – закон изменения амплитуды с течением времени. Здесь Xm – амплитуда колебаний в момент времени t, Период затухающих колебаний пружинного маятника будет равен: Из формулы (10.10) видно, что в случае затухающих колебаний ω0 > ω, тогда согласно (10.5) и (10.11) должно выполняться неравенство: T0 < Т, (10.12) которое проверяется в настоящей лабораторной работе. Описание экспериментальной установки В лабораторной работе изучаются свободные механические колебания пружинного маятника с небольшим затуханием. Определяется жесткость пружины и справедливость соотношения (10.12). Л  абораторный прибор собран на штативе 1 с вертикальной стойкой, снабженной сантиметровой шкалой 2 (рис. 10.2). В верхней части стойки укреплен пружинный маятник. Он представляет собой цилиндрическую спиральную пружину 3 с подвешенным к нему грузом 4. Для увеличения сопротивления воздуха (для усиления затухания колебаний) над грузом укреплен легкий диск 5, который одновременно служит указателем положения маятника относительно вертикальной шкалы. абораторный прибор собран на штативе 1 с вертикальной стойкой, снабженной сантиметровой шкалой 2 (рис. 10.2). В верхней части стойки укреплен пружинный маятник. Он представляет собой цилиндрическую спиральную пружину 3 с подвешенным к нему грузом 4. Для увеличения сопротивления воздуха (для усиления затухания колебаний) над грузом укреплен легкий диск 5, который одновременно служит указателем положения маятника относительно вертикальной шкалы.С Рис. 10.2. Лабораторная установка пружиной следует обращаться бережно. Начальное смещение груза не должно превышать 10 см. После проведения измерений груз снимают и помещают в коробку на основании прибора. Это обеспечит сохранение неизменными свойств пружины, ее жесткости. Под действием подвешенного груза пружина маятника деформируется – удлиняется на величину здесь F – упругая сила, равная по модулю внешней деформирующей силе, т.е. весу груза P = mгрg, mгр – масса груза, которая указана на лабораторной установке, g = 9,81 м/с2 – ускорение свободного падения. Период Т0 собственных колебаний пружинного маятника определяется по формуле (10.5), в которую необходимо подставить массу маятника – m (суммарную массу груза и его подвеса с диском). Она также указана на приборе. Период Т затухающих колебаний можно найти исходя из определения периода по формуле: где t – время, за которое маятник совершает n полных колебаний. Измерения и обработка результатовУпражнение 1. Определение жесткости пружины.
Таблица 10.1
 , ∆k = ε(k) · k, , ∆k = ε(k) · k,где ∆mгр = 0,5 г; ∆x = ∆x1 = ∆x2 = 0,5 см.
k = k ± ∆k. Упражнение 2. Определение периода собственных колебаний пружинного маятника.
где ∆m = 0,5 г.
Т0 = Т0 ± ∆Т0. Упражнение 3. Определение периода затухающих колебаний пружинного маятника.
здесь индекс i соответствует номеру измерения, а n – общее число измерений.
Таблица 10.2
Т = Тср ± ∆ Т.
Контрольные вопросы
Лабораторная работа 11 ИЗУЧЕНИЕ ЗАТУХАЮЩИХ КОЛЕБАНИЙ Цели работы: получить зависимость амплитуды затухающих колебаний от числа колебаний и представить эту зависимость графически; вычислить величины, характеризующие колебания. Приборы и принадлежности: установка для измерения амплитуды затухающих колебаний, секундомер. Библиографический список: [1] § 142, §146; [2] ч.1 § 27, § 31; [3] § 49, § 53–54, § 58; [4] § 50 – 51, § 54; [5] § 10.1–10.2; [7] § 3.1.1, § 3.1.3, § 3.2.1. Введение Совокупность связанных между собой тел, способных совершать колебания, называют колебательной системой. Простейшей колебательной системой является пружинный маятник – это груз массой m, подвешенный на упругой пружине. Различные пружинные маятники отличаются друг от друга массой груза и коэффициентом жесткости (или упругости) пружины k. Рассмотрим пружинный маятник сосредоточенной массы (масса маятника приблизительно равна массе подвешенного груза). В состоянии равновесия сила тяжести груза уравновешивается силой упругости (рис. 11.1б) и второй закон Ньютона в проекции на ось Х будет иметь вид: mg – kΔl = 0 (11.1) 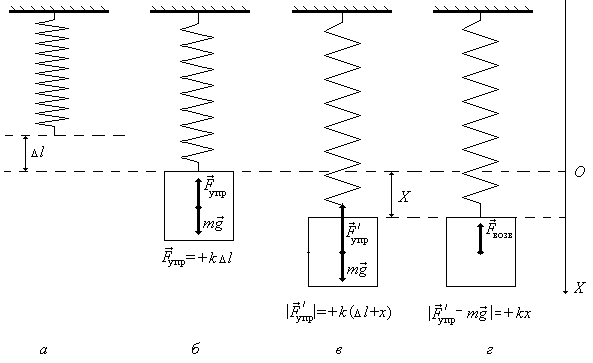 Рис. 11.1. Пружинный маятник Если груз сместить из положения равновесия на отрезок х (рис. 11.1в) и предоставить самому себе, то пружинный маятник начнет совершать колебания. Такие колебания называют свободными. В отсутствии сопротивления среды колебания будут незатухающими, при наличии сопротивления – колебания – затухающие. Уравнение движения (2-й закон Ньютона) для затухающих колебаний имеет вид: или с учетом (11.1) Здесь – kx – так называемая, возвращающая сила Fвозв. (рис. 11.1в,г), r– коэффициент сопротивления. Решением уравнения (11.3) будет функция где Коэффициент β, характеризующий быстроту затухания во времени, называется коэффициентом затухания. Согласно (11.4), затухающие колебания можно считать гармоническими колебаниями частоты ω и переменной амплитудой, равной Н 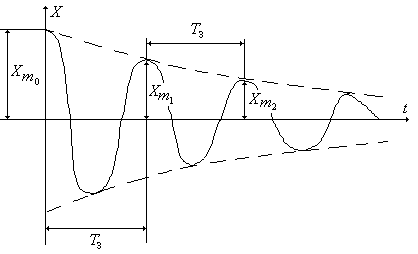 а рисунке 11.2 приведен график зависимости смещения маятника от времени в случае затухающих колебаний. Пунктирные линии на графике дают предельные значения максимального смещения (амплитуды) затухающих колебаний; а рисунке 11.2 приведен график зависимости смещения маятника от времени в случае затухающих колебаний. Пунктирные линии на графике дают предельные значения максимального смещения (амплитуды) затухающих колебаний; Рис. 11.2. , (11.8) здесь t – время, за которое маятник совершает n полных колебаний. Быстрота затухания, помимо коэффициента затухания β, характеризуется логарифмическим декрементом D, временем релаксации τ и добротностью Q. Логарифмический декремент – это натуральный логарифм отношения двух последовательных амплитуд (крайних отклонений в одну сторону через период Тз (рис. 11.2)).  . (11.9) . (11.9)Учитывая (11.7) уравнение (11.9) можно записать в виде: Время релаксации τ – это время, в течение которого амплитуда колебаний уменьшается в е раз (условно принято считать, что за это время колебания прекращаются). Согласно этому определению из (11.7) получим: Тогда равнение (11.10) можно представить в виде: где Nτ – число колебаний за время τ (такое число колебаний совершит система, прежде чем её амплитуда уменьшится в е раз). Добротность колебательной системы определяется формулой: Можно показать, что при слабых затуханиях добротность пропорциональна отношению полного запаса энергии колебательной системы W(t) к энергии, теряемой за период: При экспериментальном исследовании затухающих колебаний необходимо проверить, соответствуют ли экспериментальные результаты для зависимости Xmотt выражению (11.7). Для этого прологарифмируем уравнение (11.7) и, учтя (11.9), получим: Из выражения (11.5) следует вывод: согласно теории, натуральный логарифм амплитуды затухающих колебаний линейно зависит от числа колебаний. Таким образом, убедиться в том, что экспериментальные результаты соответствуют (или не соответствуют) теории, можно, построив график зависимости lnXm от n. Описание экспериментальной установки У 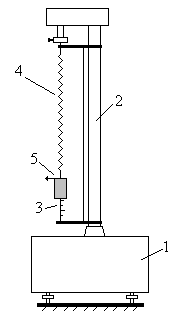 становка, используемая в работе, состоит из подставки 1 с вертикальной стойкой 2, снабженной сантиметровой шкалой 3 (рис. 11.3). В верхней части стойки укреплен пружинный маятник. Он представляет собой цилиндрическую спиральную пружину 4 с подвешенным к ней грузом, на который укреплен визир 5. становка, используемая в работе, состоит из подставки 1 с вертикальной стойкой 2, снабженной сантиметровой шкалой 3 (рис. 11.3). В верхней части стойки укреплен пружинный маятник. Он представляет собой цилиндрическую спиральную пружину 4 с подвешенным к ней грузом, на который укреплен визир 5.Масса груза m подбирается такой, чтобы, во-первых, деформация пружины была упругой, во-вторых, чтобы масса груза не менее чем в 10 раз превышала массу пружины. Измерения временных интервалов производятся с помощью секундомера. Е Рис. 11.3. Лабораторная установка сли начальная амплитуда такова, что деформация пружины будет упругой, то можно использовать теорию затухающих колебаний, рассмотренную выше. Измерения и обработка результатовУпражнение 1. Проверка справедливости уравнения затухающих колебаний.
Таблица 11.1
Упражнение 2. Определение характеристик затухающих колебаний.
|
 Незатухающие колебания – это колебания, энергия которых не изменяется с течением времени. Свободные незатухающие колебания могут существовать только при отсутствии сил трения. Эти колебания являются гармоническими, их амплитуда не изменяется. В реальных системах могут возникать колебания, близкие к гармоническим, когда трение в системе сведено к минимуму.
Незатухающие колебания – это колебания, энергия которых не изменяется с течением времени. Свободные незатухающие колебания могут существовать только при отсутствии сил трения. Эти колебания являются гармоническими, их амплитуда не изменяется. В реальных системах могут возникать колебания, близкие к гармоническим, когда трение в системе сведено к минимуму.