Рро. методичка+к+решению+кр. Учебнометодическое пособие для выполнения расчетнографических работ и проведения практических занятий
 Скачать 2.03 Mb. Скачать 2.03 Mb.
|

Уравнение токов. Как и в трансформаторе МДС холостого хода . .В нагруженном двигателе МДС  ; ;  . .или  . .Уравнения электрического состояния. Для статора или или  . .Для вращающегося ротора  или или  . .Механическая характеристика это зависимость частоты вращения ротора от момента нагрузки на валу, т.е. n(М) (рисунок 4.16):  или или   Рисунок 4.16 Пример 4.12 Трехфазный асинхронный двигатель с короткозамкнутым ротором питается от сети с линейным напряжением Uл=380 В при частоте f1=50 Гц. Номинальные данные двигателя: Рном=20 кВт, nном=960 об/мин, cos1=0,84, ном=0,88, kM=1,8. Определить: номинальный ток в фазе обмотки статора, число пар полюсов обмотки статора, номинальное скольжение, номинальный момент на валу ротора, критический момент, критическое скольжение. Решение. Номинальная мощность, потребляемая двигателем из сети:  =22,73 кВт. =22,73 кВт.Номинальный ток, потребляемый двигателем из сети:  =41,16 А. =41,16 А.Число пар полюсов при n1=1000 об/мин  =3. =3.Номинальное скольжение  =0,04. =0,04.Номинальный момент на валу двигателя  =200 Нм. =200 Нм.Критический момент  =360 Нм. =360 Нм.Критическое скольжение находим из уравнения  , ,при s=sном; М=Мном;  . . Тогда  , ,откуда   . .Пример 4.13 По данным примера 4.12 построить механическую характеристику n(M). Решение. Известны координаты трех точек характеристики: точки холостого хода sх=0, Мх=0, точки номинального режима sном, Мном, точки критического режима sк, Мк. Для точки пускового режима sП=1 и находим пусковой момент:  =46,7 Нм. =46,7 Нм.Из уравнения n=n1(1–s) находим: при sх=0 n=n1=1000 об/мин; при sном=0,04 n=nном=960 об/мин; при sк=0,132 n=nк=868 об/мин; при sП=1 n=nП=0. По полученным данным строится механическая характеристика, которая имеет вид кривой, представленной на рисунке 4.16. Пример 4.13 Трехфазный асинхронный двигатель с фазным ротором питается от сети с линейным напряжением Uл=380 В при частоте f1=50 Гц. Номинальные данные двигателя: Uном=380/220 В, Рном=30 кВт, nном=720 об/мин, cosном=0,81, ном=0,87, cos1к=0,36, kI=6,5. Определить: схему соединения фаз обмотки статора, номинальный момент, номинальный ток, потребляемый двигателем из сети, сопротивление короткого замыкания (на фазу), активное и индуктивное сопротивления фаз статора и ротора (для ротора приведенные значения), критическое скольжение.. Решение. Обмотки статора соединены в звезду, при этом номинальное напряжение двигателя Uном=380 В соответствует напряжению сети Uл=380 В. Номинальный момент на валу ротора  =398 Нм. =398 Нм.Номинальный ток, потребляемый двигателем из сети:  =64,68 А. =64,68 А.Пусковой ток I1П=kII1ном=6,564,68= 420,42 А. Параметры схемы замещения определяются в пусковом режиме, т.е. при s=1. В этом случае  и схема принимает вид рисунка 4.17 (нагрузка замкнута накоротко). и схема принимает вид рисунка 4.17 (нагрузка замкнута накоротко).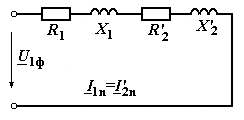 Рисунок 4.17 Из схемы следует, что сопротивление короткого замыкания:  =0,523 Ом; =0,523 Ом;Rк=Zкcos1к=0,5230,36=0,183 Ом;  Ом. Ом.Примем, что R1=R2=  ; X1=X2= ; X1=X2= (эти соотношения характерны для серийных двигателей), тогда: (эти соотношения характерны для серийных двигателей), тогда: R1=R2= =0,0985 Ом;X1=X2= =0,245 Ом.Критическое скольжение  =0,187. =0,187.Пример 4.14 Асинхронный двигатель с фазным ротором, приводящий в движение подъемный механизм, имеет следующие номинальные данные: Рном=10 кВт, nном=1460 об/мин, R2=0,18 Ом, Xк=0,52 Ом, kM=2. Определить сопротивление Rдоб, которое должно быть включено в фазу ротора для того, чтобы начальный пусковой момент электродвигателя был равен критическому. Решение. Сопротивление Rдоб находится из условия, что пусковой момент МП равен критическому Мк. В этом случае  , ,откуда Rдоб=XкR2=0,52–0,18=0,34 Ом. 4.4 Электропривод Выбор типа двигателя – один из ответственных этапов проектирования электропривода, так как именно двигатель в значительной степени определяет технические и экономические качества привода. Из многочисленных типов двигателей переменного и постоянного токов для привода той или иной производственной машины должен быть выбран такой, который наиболее полно удовлетворял бы технико-экономическим требованиям. Это значит двигатель должен быть наиболее простым по управлению, надежным в эксплуатации и с наименьшей стоимостью, массой габаритами, а также с высокими энергетическими показателями. При выборе мощности двигателя основными исходными данными являются требуемые нагрузочные моменты, которые должны быть приложены к валу механизма, т.е. необходимо иметь нагрузочные диаграммы электропривода Р=f(t) или М=f(t), которые могут быть заданы в виде графика или таблицы. Пример 4.15 Определить необходимую мощность двигателя для привода механизма, режим работы которого задан нагрузочной диаграммой на рисунке 4.18. По технологическим условиям следует использовать асинхронный двигатель с короткозамкнутым ротором. Двигатель должен иметь частоту вращения n=980 об/мин, помещение, где установлен двигатель, сухое, без пыли и грязи. 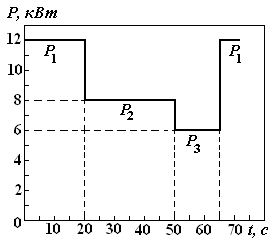 Рисунок 4.18 Решение. В данном случае режима работы представляет собой длительную переменную нагрузку. Мощность двигателя подбирают при подобных режимах работы по эквивалентной мощности, которая равна:  , ,где tц время цикла работы, tц=t1+t2+t3=20+30+15=65 с;  =9,05 кВт. =9,05 кВт.По данным каталога в качестве приводимого двигателя можно использовать асинхронный короткозамкнутый двигатель в защищенном исполнении типа А2-61-6; 380/220 В; Рном=10 кВт, nном=965 об/мин; ном=0,870;  =1,2; =1,2;  =1,8. =1,8.В ряде случаев момент нагрузки на отдельных участках оказывается больше максимально допустимого момента двигателя, и асинхронный двигатель может остановиться. Поэтому после выбора двигателя его необходимо проверить по нагрузочной способности исходя из условия МmaxMmax доп, где Мmax максимальный момент на валу двигателя; Mmax доп максимально допустимый момент двигателя. Для асинхронного двигателя Mmax доп=0,9Мк. Здесь Мк критический (максимальный) момент двигателя. В данном примере Номинальный момент двигателя  =99 Нм, =99 Нм,критический момент Мк=Мном=1,899=178 Нм, максимальный статический момент  =117 Нм. =117 Нм.Перегрузочной способности двигатель удовлетворяет, так как выполняется условие 0,9Мк=0,9178=160>Мст=117. В том случае, когда нагрузочные диаграммы заданы моментом М=f(t) или током I=f(t), мощность двигателей выбирают либо по эквивалентному моменту  , ,либо по эквивалентному току  . .Пример 4.16 Определить необходимую мощность двигателя для приводя механизма, работающего в повторно-кратковременном режиме, который задан нагрузочной диаграммой, изображенной на рисунке 4.19. Двигатель должен развивать частоту вращения n=720 об/мин. Решение. Определяем эквивалентный момент за рабочее время:  =69,2 Нм. =69,2 Нм.Определяем мощность, соответствующую эквивалентному моменту за рабочее время:  =5,2 кВт. =5,2 кВт.Определяем относительную продолжительность включения:  =0,54. =0,54.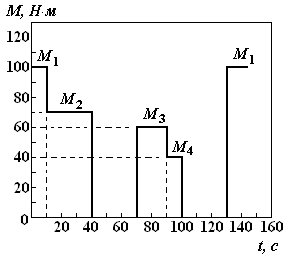 Рисунок 4.19 В каталогах для двигателей повторно кратковременного режима номинальная мощность указывается для следующих стандартных значений относительной продолжительности включения ПВ: 0,15; 0,25; 0,4 и 0,6. В том случае, когда расчетная ПВ, определяемая по нагрузочной диаграмме, отличается от стандартного значения, мощность двигателя пересчитывают по формуле:  =4,93 кВт, =4,93 кВт,где ПВном=0,6. По данным каталога по аналогии с примером 4.15 может быть подобран двигатель с расчетной мощностью 5,0 кВт и ПВном=0,6. Список литературы 1 Электротехника / Под ред. Проф. В.С.Пантюшина. М.: Высшая школа, 1976. 2 Электротехника / Под ред. В.Г.Герасимова. М.: Высшая школа, 1985. 3 Ю.М.Борисов и др. Электротехника. М.: Энергоатомиздат, 1985. 4 А.С.Касаткин, М.В.Немцов. Электротехника. М.: Энергоатомиздат, 1983. 5 Сборник задач по электротехнике и основам электроники /Под ред. проф. В.С.Пантюшина. М.: Высшая школа, 1979. 6 В.А.Волынский. Электротехника. М.: Энергоатомиздат, 1987. Приложение А Основные электрические и магнитные величины
Продолжение приложения А
Для изменяющихся во времени величин, например ЭДС, напряжения, потенциала, заряда, тока, потности тока, следует применять обозначения: а – мгновенное значение; А – действующее значение (для периодически изменяющихся величин); Am – амплитуда (для гармонически изменяющихся величин). Здесь под а, А, Am понимается любая из изменяющихся во времени величин. Комплексные величины следует обозначать по типу  где  любая из комплексных величин; любая из комплексных величин; действительная часть комплексной величины; действительная часть комплексной величины; мнимая часть комплексной величины; мнимая часть комплексной величины; аргумент комплексной величины. Сопряженная комплексная величина  . .Допускается для обозначения комплексных действующих и амплитудных значений величин, являющихся синусоидальными функциями времени, вместо вышеуказанных обозначений ставить точку над основным обозначением величины, например:  комплексный действующий ток; комплексный действующий ток;  комплексная амплитуда магнитного потока. комплексная амплитуда магнитного потока.Приложение Б | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||