Рро. методичка+к+решению+кр. Учебнометодическое пособие для выполнения расчетнографических работ и проведения практических занятий
 Скачать 2.03 Mb. Скачать 2.03 Mb.
|

Активное сопротивление цепи и индуктивное сопротивление цепи  . .Так как практически сопротивления R1<<R0 и X1d<<X0, то значения R0 и X0 определяются из приведенных формул. Опыт короткого замыкания (КЗ) выполняется по схеме, представленной на рисунке 4.6, при условии, что к первичной обмотке подводится пониженное напряжение U1к, составляющее 510 % от номинального, а точнее такое напряжение, при котором токи I1 и I2 в обмотках равны номинальным. Вторичная обмотка трансформатора замыкается накоротко. При этом вольтметр V1 показывает напряжение первичной обмотки U1к, ваттметр – мощность короткого замыкания Pк, амперметр А1 – ток в первичной обмотке. По эти показаниям можно определить мощность потерь в обмотках, так как потери в магнитопроводе составляют лишь 510 % потерь при номинальном режиме из-за пониженного напряжения U1к. Мощность потерь при коротком замыкании и номинальных токах Pк, ном=R1I21ном+ R2I22ном.  Рисунок 4.6 Кроме того, по данным этого опыта можно найти параметры упрощенной схемы замещения. Полное сопротивление  , ,суммарное активное сопротивление  и реактивное сопротивление  . .Напряжение короткого определяется:U1к=ZкI1ном.Обычно оно составляет 58 % о номинального значения:
|
 .
. ,
, .
. .
. .
. .
. ,
, .
. .
.
 .
. ,
, 

 , получим значение опт, при котором значение КПД максимально:
, получим значение опт, при котором значение КПД максимально: .
.
 А.
А. А.
А.
 Ом;
Ом; Ом;
Ом; Ом.
Ом. В и
В и  А.
А. Ом;
Ом; Ом;
Ом; Ом.
Ом. Ом;
Ом; Ом.
Ом. %;
%; %;
%; ,
, Ом;
Ом; Ом,
Ом, А;
А; %;
%; В;
В; А.
А. и трансформатор работает под нагрузкой в течении года 4200 ч, а остальное время цепь вторичной обмотки разомкнута.
и трансформатор работает под нагрузкой в течении года 4200 ч, а остальное время цепь вторичной обмотки разомкнута. . Так как схема соединения обмоток Y/Y, то
. Так как схема соединения обмоток Y/Y, то  и
и  .
. раз:
раз: В;
В; В.
В. . Номинальные токи первичной и вторичной обмоток
. Номинальные токи первичной и вторичной обмоток А;
А; А;
А; ,
, и
и  мощности потерь в сопротивлениях одной фазы при номинальных токах. Учитывая указание, можно записать:
мощности потерь в сопротивлениях одной фазы при номинальных токах. Учитывая указание, можно записать: и
и  ;
; Ом;
Ом;  ;
; Ом.
Ом. ;
;

 , то, пренебрегая потерями, определяем токи.
, то, пренебрегая потерями, определяем токи. А;
А; А.
А. В
В В.
В. .
. ,
, Вт.
Вт. ,
, .
. . Задавая значения 2 через 30, рассчитываем
. Задавая значения 2 через 30, рассчитываем  | 90 | 60 | 30 | 0 | 30 | 60 | 90 |
  | 4,82 | 5 | 3,735 | 2,65 | 0,12 | 2,85 | 4,82 |
КПД при =0; 0,25; 0,5; 1,0 рассчитаем по
 .
.Результаты расчета сведены в таблице 4.2.
Таблица 4.2.
| | 0 | 0,25 | 0,5 | 1 |
| | 0 | 0,9556 | 0,9656 | 0,9591 |
4.2 Машины постоянного тока
Электрические машины постоянного тока могут работать как в режиме генератора, так и в режиме двигателя, т.е. обладают свойством обратимости. В режиме генератора они преобразуют механическую энергию, подводимую к их валу от первичного двигателя, в электрическую энергию постоянного напряжения, а в режиме двигателя осуществляют обратное преобразование: электрическую энергию постоянного тока преобразуют в механическую энергию, снимаемую с их вала.
В народном хозяйстве генераторы постоянного тока применяются для питания различного рода устройств, работающих на постоянном токе, в том числе электрических двигателей постоянного тока. Двигатели постоянного тока находят широкое применение в тех случаях, когда механизм, приводимый во вращение двигателем, должен иметь широкий и плавный диапазон регулирования скорости: в мощных металлорежущих станках, на электрофицированном транспорте, в автоматике и т.п. Как генераторы, так и двигатели изготавливаются промышленностью серийно мощностью от ватт до сотен киловатт.
Пример 4.4 Генератор параллельного возбуждения (рисунок 4.9) имеет следующие номинальные данные: Pном=25 кВт, Uном230 В, потери в цепи возбуждения РВ=2 % от Рном, потери в обмотке якоря РЯ=2 % от Рном. Определить: номинальный ток якоря IЯ,ном, номинальный ток возбуждения IВ,ном, сопртивление цепи якоря RЯ, ЭДС якоря в номинальном режиме Eном, сопротивление цепи возбуждения RВ при номинальном токе возбуждения IВ,ном.
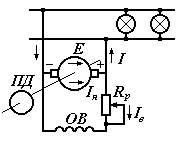
Рисунок 4.9
Решение.
Номинальный ток генератора
 =109 А.
=109 А.Сопротивление цепи возбуждения
 =105,8 Ом.
=105,8 Ом.Номинальный ток возбуждения
 =2,17 А.
=2,17 А.Сопротивление якоря
 =0,142 Ом.
=0,142 Ом.Номинальный ток якоря
IЯ,ном=Iном+IВ,ном=109+2,17=111,7 А.
Номинальная ЭДС якоря
Eном=Uном+RЯIЯ,ном=230+0,142111,17=245,7 В.
Пример 4.5 Для генератора с данными примера 4.4 определить сопротивление обмотки возбуждения RО,В принимая, что при холостом ходе генератора и полностью выведенном реостате в цепи возбуждения ток этой цепи составляет 1,2IВ,ном; так как в режиме холостого хода U=E=CEnФ, то при n=const характеристика U(Ф) аналогична характеристике холостого хода и может быть задана таблицей 4.3, где
 ;
; 
Фном поток возбуждения, при котором E=Uном:
Таблица 4.3
| IВ, % | 0 | 20 | 40 | 60 | 80 | 100 | 120 | 150 |
| Ф, % | 5 | 45 | 73 | 88 | 95 | 100 | 103 | 107 |
Решение.
Ток возбуждения в рассматриваемом режиме
IВ=1,2IВ,ном=2,171,2=2,6 А.
По характеристике холостого хода находим, что при токе IВ=1,2IВ,ном магнитный поток генератора Ф=1,03Фном. Так как n=const, то
E=CEnФ=CEn1,03Фном=1,03Eном=1,03245,7=253,1 В.
По цепи якоря генератора – обмотка возбуждения протекает ток IВ=2,6 А. Из закона Кирхгофа следует, что E=(RЯ+RО,В)IВ, откуда
 =97,2 Ом.
=97,2 Ом.Пример 4.6 Для генератора с данными примера 4.4 определить сопротивление реостата в цепи возбуждения Rp, которое в режиме холостого хода надо ввести для того, чтобы напряжение на зажимах якоря было равно номинальному.
Решение.
Из условия задачи следует, что ЭДС E=Uном=230 В. Так как в режиме холостого хода E=U+RЯIВ, а RЯIВ<<U, то EU=230 В.
ЭДС E=230 В составляет 93,8 % от Eном. При n=const поток Ф и ЭДС Е пропорциональны (E=CEnФ), поэтому зависимость Ф=f(IВ) есть также зависимость E=f(IВ), по которой находим, что при E=93,8Eном ток возбуждения IВ=0,98IВ,ном=0,982,17=2,13 А.
В режиме холостого хода EIВ(Rp+RО,В), отсюда
 =10,64 Ом.
=10,64 Ом.Пример 4.7 Двигатель параллельного возбуждения серии 2П (рисунок 4.10) имеет следующие данные: Uном=220 В, nном=1500 об/мин, Рном=2,4 кВт, ном=0,808, RЯ=0,83 Ом, RВ=Rp+RО,В=440 Ом. Определить токи IВ,ном, IВ,ном, Iном, номинальный момент Мном и противо-ЭДС Еном.
Решение.
Номинальная мощность потребляемая из сети
 =2970 Вт,
=2970 Вт,номинальный момент
 =15,29 Нм.
=15,29 Нм.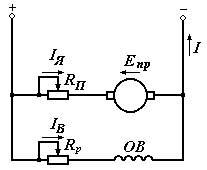
Рисунок 4.10
Здесь коэффициент 9555 учитывает, что Рном подставляется в формулу в кВт, а n – в об/мин. Номинальный ток, потребляемый из сети,
 =13,5 А.
=13,5 А.Номинальный ток возбуждения
 =0,5 А.
=0,5 А.Номинальный ток якоря
IЯ,ном=IномIВ,ном=13,50,5=13,0 А.
Номинальная противо-ЭДС
Еном=UномRЯIЯ,ном=2200,8313,0=209,2 В.
Пример 4.8 По данным примера 4.7 рассчитать и построить механическую характеристику двигателя.
Решение.
Механическая характеристика двигателя описывается формулами:
 ;
; ,
,где
 конструктивный коэффициент ЭДС, N число проводников якоря; 2a число параллельных ветвей; 2р число пар полюсов,
конструктивный коэффициент ЭДС, N число проводников якоря; 2a число параллельных ветвей; 2р число пар полюсов, конструктивный коэффициент момента;
конструктивный коэффициент момента;  .
.Так как характеристика n(М) – прямая линия, ее можно построить по двум точкам: точке, характеризующей режим идеального холостого хода, с координатами nх, М=0 и точке номинального режима с координатами nном, Мном. Из четырех координат неизвестна одна nх. Она может быть найдена из первого уравнения при М=0:
 . Разделим ее на
. Разделим ее на  и получим:
и получим: =1573,4 об/мин.
=1573,4 об/мин.Координаты точек режима холостого хода и номинального режима откладываем на плоскости n, M. Соединяя точки с координатами nх, М=0 и nном, Мном прямой линией, получаем механическую характеристику (рисунок 4.11).
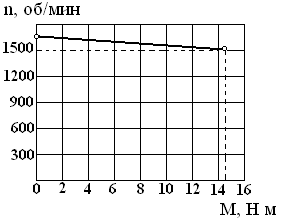
Рисунок 4.11
Пример 4.9 Двигатель постоянного тока параллельного возбуждения имеет следующие данные: Рном=8 кВт, Uном=110 В, nном=1000 об/мин, Iном=86 А, RЯ=0,05 Ом, RВ=Rp+RО,В=32 Ом. Определить все виды потерь в номинальном режиме.
Решение.
Мощность потребляемая из сети
Р1ном=UномIном=11086=9460 Вт,
КПД двигателя
 =0,846.
=0,846.Общие потери
Рном=Р1номРном=94608000=1460 Вт.
Ток и потери в цепи возбуждения
 =3,44 А;
=3,44 А; =378,7 Вт.
=378,7 Вт.Ток и потери в цепи якоря
IЯ,ном=IномIВ,ном=863,44=82,56 А;
 =340,8 Вт.
=340,8 Вт.Электрические потери
Рэ,ном=РЯ,ном+РВ,ном=340,8+378,7=719,5 Вт.
Потери в стали, механические и дополнительные потери:
РСТ +Рмех+Рдоп=Рном Рэ,ном =1460–719,5=740,5 Вт.
Дополнительные потери
Рдоп0,01Рном=0,018000=80 Вт.
Потери в стали и механические потери
РСТ +Рмех=740,5–80=660,5 Вт.
Потери в стали и механические потери в данной задаче не разделяются.
Пример 4.10 Для двигателя (пример 4.9) определить пусковой ток и пусковой момент: а) при пуске двигателя без пускового реостата, б) при пуске двигателя с пусковым реостатом RП=0,6 Ом и в) при ошибочной схеме включения пускового реостата (рисунок 4.12).
Решение.
а) В первый момент пуска n=0
Епр=СЕnФ=0.
Пусковой ток якоря
 =2200 А.
=2200 А.Ток возбуждения
 =3,44 А,
=3,44 А,где RВ=Rp+RО,В.
Пусковой ток двигателя
IП=IЯ,П+IВ=2200+3,44=2203,44 А.
Номинальный момент
 =76,4 Нм.
=76,4 Нм.Так как пусковой момент МП=СMIЯ,ПФ, а номинальный момент Мном=СMIЯ,номФ, то, разделив МП на Мном, получим:
 =2055,8 Нм.
=2055,8 Нм.Из полученных данных видно, что пусковой ток IП и момент МП чрезмерно велики и пуск двигателя без пускового реостата недопустим.
б) При пуске с пусковым реостатом:
пусковой ток якоря
 =169,2 А.
=169,2 А.Пусковой ток двигателя
IП=IЯ,П+IВ=169,2+3,44=172,64 А.
(ток возбуждения остается неизменным).
Пусковой момент
 =156,6 Нм.
=156,6 Нм.(так как пуск двигателя длится несколько секунд, то перегрузки по току и моменту находятся в допустимых пределах).
в) под ошибочным включением пускового реостата RП понимают включение его в общую цепь, а не в цепь якоря (рисунок 4.12).
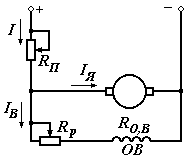
Рисунок 4.12
При таком включении пусковой ток

 =169,25 А.
=169,25 А.Напряжение на якоре и на цепи возбуждения
UЯ=UВ=UномRПIП=110–169,250,6=8,45 В.
Ток возбуждения
 =0,264 А,
=0,264 А,что в процентах от IВ,ном составляет
 7,7 %.
7,7 %.Току IВ=7,7 % от IВ,ном по таблице примера 4.5 соответствует магнитный поток Ф=15 % от номинального. Разделив МП на Мном, получим:
 =23,49 Нм.
=23,49 Нм.Пример 4.11 Двигатель последовательного возбуждения имеет следующие номинальные данные: Uном=220 В, Iном=125 А, nном=1000 об/мин, ном=0,82, RЯ=1 Ом. Рассчитать и построить механическую характеристику двигателя n(M).
Решение.
Найдем момент при токах
I=(0,2; 0,4; 0,6; 0,8; 1,0)Iном.
Вращающий момент двигателя M=CMIЯФ, при номинальном токеMном=CMIЯ,номФном. Выразим М через Мном:
 ,
,где

 =195,8 Нм.
=195,8 Нм.Так как в двигателе последовательного возбуждения I=IВ, то по заданным значениям
 и таблице примера 4.5 находим
и таблице примера 4.5 находим  и М. Частота вращения определяется из уравнения
и М. Частота вращения определяется из уравнения .
.При номинальном режиме частота
 .
.Разделив первое уравнение на второе, получим
 .
.Данные расчета сведем в таблицу 4.4.
Таблица 4.4
| | 0,2 | 0,4 | 0,6 | 0,8 | 1,0 | 1,2 |
| I, А | 25 | 50 | 75 | 100 | 125 | 150 |
| | 0,45 | 0,73 | 0,88 | 0,95 | 1,00 | 1,03 |
| М, Нм | 17,6 | 57,2 | 103,4 | 148,8 | 195,8 | 242,0 |
| n, об/мин | 4554 | 2450 | 1740 | 1324 | 1000 | 715 |
По расчетным данным строим механическую характеристику (рисунок 4.12).
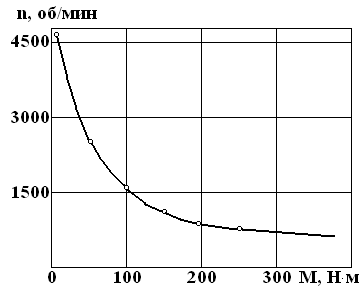
Рисунок 4.13
4.3 Асинхронные машины
4.3.1 Устройство асинхронных машин. Асинхронные машины – это машины переменного тока. Слово асинхронный означает не синхронный или неодновременный. При этом имеется в виду, что у асинхронных машин частота вращения магнитного поля отличается от частоты вращения ротора. Асинхронные машины, как и все электрические машины, обладают свойством обратимости, т.е. могут работать как в режиме двигателя, так и в режиме генератора. Асинхронные двигатели имеют значительные преимущества по своим свойствам, характеристикам и эксплуатационным данным перед двигателями других типов. Такие двигатели могут быть однофазными, двухфазными и трехфазными. Наибольшее распространение имеют трехфазные двигатели. Асинхронные генераторы практически не применяются, так как их характеристики значительно хуже, чем синхронных генераторов.
Асинхронный двигатель, как и всякая электрическая машина, состоит из статора и ротора.
Статор имеет цилиндрическую форму. Он состоит из корпуса, сердечника и обмотки. Корпус литой, в большинстве случаев стальной или чугунный. Сердечник статора собирается из тонких листов электротехнической стали. Листы для машин малой мощности ничем не покрываются, так как образующиеся на листах окислы являются достаточной изоляцией. Собранные листы стали образуют пакет статора, который запрессовывается в корпус статора. На внутренней поверхности сердечника вырублены пазы, в которые укладывается обмотка статора. Обмотки статора могут соединяться звездой или треугольником. Для осуществления таких соединений на корпусе двигателя имеется коробка, в которую выведены начала фаз С1, С2, С3 и концы фаз С4, С5, С6.
На рисунке 4.14 показаны схемы расположения этих выводов и способы соединения их между собой при соединении фаз звездой и треугольником. Схема соединений обмоток статора зависит от расчетного напряжения двигателя и номинального напряжения сети Например, в паспорте двигателя указано 380/220. Первое число соответствует схеме соединения обмоток в звезду при линейном напряжений в сети 380 В, а второе – схеме соединения в треугольник при линейном напряжений сети 220 В – в обоих случаях напряжение на фазе обмотки будет 220 В.
Рисунок 4.14
Корпус статора с торцов закрыт подшипниковыми щитами, в которые запрессованы подшипника вала ротора.
Ротор асинхронного двигателя состоит из стального вала, на который напрессован сердечник, выполненный, как и сердечник статора, из отдельных листов электротехнической стали с выштампованными в них закрытыми или полузакрытыми пазами. Обмотка ротора бывает двух типов: короткозамкнутая и фазная – соответственно роторы называются короткозамкнутыми и фазными.
Большее распространение имеют двигатели с короткозамкнутым ротором, так как они дешевле и проще в изготовлении и в эксплуатации. Токопроводящая часть такого ротора, названного М.О.Доливо-Добровольским ротором с беличьей клеткой, состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов. Как правило, беличья клетка формируется путем заливки пазов ротора расплавленным алюминием.
Фазный ротор имеет три обмотки 1, соединенные в звезду. Выводы обмоток подсоединены к кольцам 2, закрепленным на валу 3. К кольцам при пуске прижимаются неподвижные щетки 4, которые подсоединяются к реостату 5 (рисунок 4.15).
Рисунок 4.15
4.3.2 Основные параметры асинхронных машин.
Токи в обмотках статора
iA=Imsint; iB=Imsin(t120); iC=Imsin(t+120)
создают вращающееся магнитное поле.
Вращающееся магнитное поле
Вmрез=
 Вmsin(t),
Вmsin(t),где Вm – максимальная индукция одной фазы; Вmрез максимальная индукция трех фаз; угол между горизонтальной осью и прямой, соединяющей центр с произвольной точкой между статором и ротором.
Формула определения частоты вращения поля
 ,
,где р – число пар полюсов; f1 частота питающего напряжения.
Под холостым ходом двигателя понимается его работа без нагрузки на валу. Из-за механических потерь частота вращения ротора отличается от частоты вращения поля на 12 %.
Если принять потери равными нулю, тогда частота вращения ротора равна частоте вращения магнитного поля и ток в обмотке ротора отсутствует. Такой режим называется режимом идеального холостого хода (ХХ).
В режиме ХХ ток Iх статора примерно на порядок больше тока холостого хода трансформатора. Объясняется это тем, что воздушный зазор между ротором и статором увеличивает магнитное сопротивление магнитопровода. Если в трансформаторе Iх составляет примерно 28 % от номинального тока первичной обмотки, то в статоре трехфазного асинхронного двигателя Iх составляет 2045 % номинального тока статора.
Скольжение. При нагрузке ротор вращается с частотой n, а поле – с частотой n1. Отношение разности между ними к частоте вращения поля называется скольжением s:
 , или
, или 
Частота вращения. Частота вращения поля статора называется синхронной частотой, а частота вращения ротора – асинхронной. В зависимости от мощности и исполнения двигателя скольжение в номинальном режиме составляет примерно 28%. Например, при s=3 % частота вращения ротора при числе пар полюсов р=1,2,3 соответственно составляет 2910, 1445, 970 об/мин.
 , или
, или 
При неподвижном роторе, например в момент пуска двигателя n=0 и, следовательно, s=1.
Частота тока ротора определяется по формуле:
Если числитель и знаменатель умножить на n1, тогда
f2=sf1.
Для частоты f1=50 Гц и s=28 % частота тока обмотки ротора будет 14 Гц.
Электродвижущие силы обмоток двигателя. ЭДС фазы обмотки статора определяется формулой:
E1=4,44kоб1w1f1Фm,
где w1 – число витков обмотки статора; kоб1 обмоточный коэффициент, который учитывает укорочение шага обмотки, ее распределение по нескольким пазам и скос пазов.
ЭДС неподвижного ротора
E2=4,44kоб2w2f1Фm,
в неподвижном ротора частота ЭДС f2=f1. Во вращающемся роторе
E2s=4,44kоб2w2f2Фm,
или
E2s=4,44kоб2w2sf1Фm.
Тогда
E2s=sЕ2 или E2s=(0,020,08)Е2.
Легко показать, что связь между индуктивными сопротивлениями неподвижного и вращающегося ротора
Х2s=sХ2.